水下协同附着装置及其水下机器人与工作方法
- 国知局
- 2024-08-01 06:59:20
本发明属于机器人应用,具体涉及一种面向水下复杂表面的吸盘、钩刺和粘附材料协同附着装置和仿葎草的轮式攀附的装置及其多螺旋桨水下机器人运动方式,主要作为水下复杂表面的附着移动平台。
背景技术:
0、技术背景
1、适应各种水下复杂环境的机器人是当今机器人研究领域最为前沿的课题之一,它集机械、电子、计算机、材料、传感器、控制技术及人工智能等多门学科于一体,是一个国家的智能化和自动化程度的体现,同时也作为一个国家高科技实力的重要标志。
2、水下机器人首先需要解决的问题是在不同的表面进行附着并且移动,目前机器人的附着方式主要分为磁吸附着、仿生材料粘附附着、真空负压吸附附着、钩爪夹持附着。磁吸主要在金属表面吸附;仿生材料多为微型刚毛结构,由于其功能限制,在水中的附着力较小;真空负压吸附主要是以吸盘结构为载体,机器人一般只能在光滑的表面上吸附;钩爪附着一般只能在粗糙的表面上有较大的附着力。水下表面环境是非常复杂的,因此,设计一种能够适应不同粗糙面的附着装置,将有重要的研究意义和工程价值。
3、目前水下机器人在物体表面移动主要是以磁吸移动、履带吸盘移动、螺旋桨推进移动等。这些移动方式受限于表面的材质,应用面较窄,如对于冰层表面就不能发挥作用。因此,设计一种能够在船体表面以及冰层面上攀附的装置以适应不同表面移动的需求。
4、北京理工大学提出了一种履带吸盘式玻璃幕墙清洁机器人,该机器人采用履带和吸盘结合的方式实现玻璃幕墙上的吸附与运动,但是其只能在平整的玻璃幕墙上运动,在较为粗糙的表面就不能发挥作用。北京理工大学.履带吸盘式壁面清洁机器人[p]:中国,102631173a.2012-08-15.。哈尔滨理工大学研制了一种水下爬壁机器人,其利用螺旋桨产生吸附力,通过履带在水下壁面上行走,但其吸附过程中螺旋桨需要一直开启,能量消耗高庄博. 水下爬壁机器人结构设计与运动稳定性研究[d].哈尔滨理工大学,2018.。南京农业大学提出了一种轮式全向钩爪爬壁机器人主要应用于粗糙表面爬行,对于冰层负角度的移动难以发挥作用。
5、南京农业大学.轮式全向钩爪爬壁机器人及其运动方法 [p]:中国,111746679a.2020-10-9
6、目前关于吸盘、钩爪和粘附材料协同的附着装置和在船体、冰层等表面攀附的装置的水下机器人尚未有报道。
技术实现思路
1、本发明目的是设计出水下协同附着装置及其水下机器人。通过吸盘、钩爪和粘附材料协同附着,机器人能够在水下不同粗糙度的表面附着。通过轮式攀附装置实现机器人表面如冰面上攀附的运动,通过多螺旋桨的协同作用使机器人水中实现全向运动。
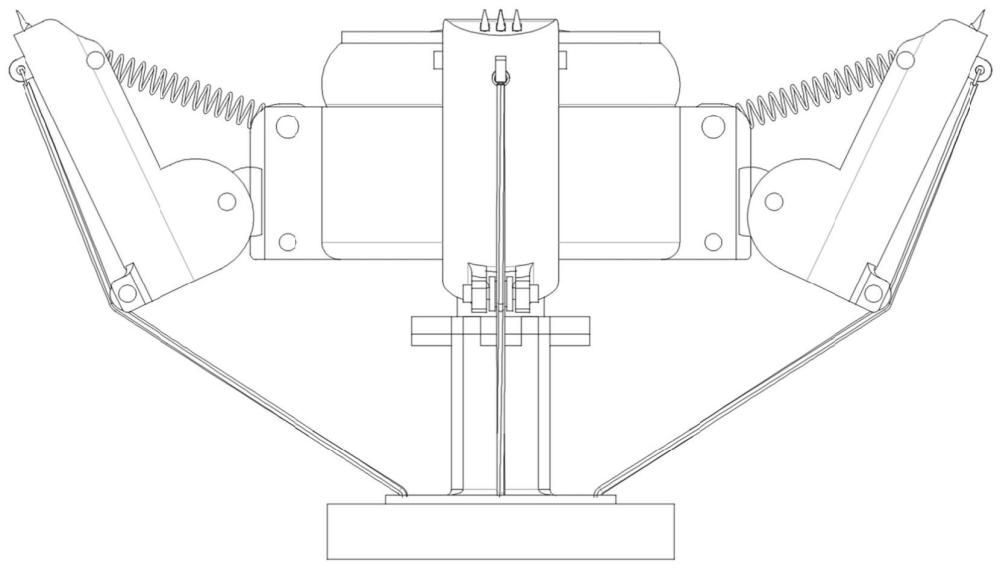
2、上述的吸盘、钩爪和粘附材料协同的水下附着装置,其特征在于:包括中心机构和位于中心结构周围的钩爪机构;其中中心机构由下向上依次包括底座、第一套筒、固定盘、吸盘,吸盘上表面安装粘附材料;其中底座设有安装槽,安装槽内安装绕线盘,套筒内安装第一减速电机,第一减速电机输出轴与绕线盘相连;上述吸盘与一充抽气装置相连;其中钩爪机构包括第一连接件、钩爪主体、拉伸弹簧、滚轮、拉线;其中第一连接件安装于中心结构的固定盘上;钩爪主体下部和第一连接件下部通过销轴连接;拉伸弹簧的一端通过销轴与第一连接件上部相连,拉伸弹簧的另一端通过销轴与钩爪主体上部相连;滚轮通过销轴安装于钩爪主体下部且背离拉伸弹簧一侧;拉线一端固定于钩爪主体上部且背离拉伸弹簧一侧,另一端绕过滚轮与绕线盘相连;钩爪主体的上部还安装有钩或刺。粘附材料为圆环形状。
3、上述的吸盘、钩爪和粘附材料协同的水下附着装置的运动方式,其特征在于:
4、附着过程:水下协同附着装置接触附着平面的过程中,第一减速电机正转带动绕线盘转动使拉线收紧,拉线拉动钩爪主体,与钩爪主体固定拉伸弹簧拉长并开始蓄能,粘附材料最先接触附着表面,密封住吸盘与附着的物体表面的空间,随着吸盘被抽成真空,在负压力的作用该附着装置吸附在要附着的表面,并且粘附材料由于负压产生了预压力,粘附力发挥作用;第一减速电机反转,拉伸弹簧开始释能,四个钩爪主体向中心收缩,钩爪主体上的钩或刺与附着的物体表面接触,产生切向力和法向力,实现吸盘、钩爪与粘附协同附着;
5、脱附过程:水下协同附着装置脱附的过程中,第一减速电机正转带动绕线盘转动使拉线收紧,拉绳收紧并带动钩爪主体转动,并将与之固定的拉伸弹簧拉长,钩爪主体上的钩或刺脱离附着平面,然后向吸盘充气,吸盘的顶部在气压的作用膨胀,顶着附着的平面,随着气压的不断增大,将顶开粘附材料与附着平面之间的粘附力,从而实现吸盘、钩爪与粘附材料附着装置脱附。
6、上述的轮式攀附装置,其特征在于:包括平衡板,通过轮架结构安装于平衡板的上的仿葎草的轮式结构;所述仿葎草的轮式结构由轮毂、轮毂外侧端盖、第二减速电机、滚动轴承、第二套筒、轮毂内侧端盖组成;其中轮毂通过滚动轴承安装于第二套筒上,可相对转动;其中轮毂内侧端盖和轮毂外侧端盖分别固定安装于轮毂内、外两侧;其中第二套筒安装于车架;其中第二减速电机安装于套筒内,其输出轴与轮毂外侧端盖相连,带动轮毂外侧端盖、轮毂及其轮毂内侧端盖一起转动;上述轮毂表面布置有若干对葎草仿生双头刺;每个对葎草仿生双头刺均由方向相反的两根刺结构组成;且对葎草仿生双头刺的刺的安装朝向轮毂周向;上述一个轮毂上的全部对葎草仿生双头刺沿轮毂周向均匀分成若干组刺结构,每一组刺结构由带扭簧的销轴、第四连接件、沿轮毂表面平行轴线方向布置的若干个对葎草仿生双头刺组成;对葎草仿生双头刺通过带扭簧的销轴安装于连接件,连接件安装于轮毂上;上述带扭簧的销轴具有两个旋向相反的扭簧,分别布置于销轴的两端。所述的轮毂由n片轮毂片组合而成。上述平衡板的底部也安装有对葎草双头仿生刺;具体实现方式为:平衡板底部安装有若干带扭簧的销轴,销轴与轮轴方向平行,对葎草仿生的双头刺安装于销轴上,销轴上的扭簧旋向相同,使得对葎草仿生的双头刺也朝着同一个方向。
7、上述水下机器人,其特征在于:该机器人具有气密舱,还设置有8个螺旋桨,其中四个螺旋桨在气密舱前端圆周方向向上均匀排布,其方位分别描述为左前上、左前下、右前上、右前下;另外四个螺旋桨在气密舱的后端的圆周方向上均匀排布,其方位分别描述为左后上、左后下、右后上、右后下;在这八个螺旋桨中,左前上和右前上的螺旋桨轴线的延长线交于气密舱前方上部的一点;左前下和右前下的螺旋桨轴线的延长线交于气密舱前方下部的一点;左后上和右后上的螺旋桨轴线的延长线交于气密舱后方上部的一点;左后下和右后下的螺旋桨轴线的延长线交于气密舱后方下部的一点,这四个交点在一个平面上,且这个平面通过气密舱的中心轴线;此外,左前上、左前下、右后上、右后下的螺旋桨为正桨;右前上、右前下、左后上、左后下的螺旋桨为反桨;从气密舱的后向前看,正桨正转为逆时针旋转,产生向后的推力;正桨反转为顺时针旋转,产生向前的推力,反桨正转为顺时针旋转,产生向后的推力;反桨反转为逆时针旋转,产生向前的推力。
8、上述的水下协同附着装置及其水下机器人与工作方法,其特征在于包括以下过程:
9、机器人水下的运动过程:改变机器人气密舱上八个螺旋桨的正反转和转速,使得机器人实现前进、后退、上浮、下潜、原地左转、原地右转、俯仰、翻滚在内的全向运动;
10、机器人附着物体表面过程:气密舱的左前上、左后下、右前上、右后下的螺旋桨正转,左后上、左后下、右前下、右后下的螺旋桨反转;每个螺旋桨都产生斜向下的力,最终合成向下的推力,使得机器人能够向上运动,同时吸盘、钩爪与粘附材料协同附着装置执行脱附的运动,在机器人不断靠近待附着物体,吸盘、钩爪与粘附材料协同附着装置上的吸盘接触表面后,吸盘、钩爪与粘附材料协同附着装置执行附着的运动;产生吸盘、钩爪、粘附协同的附着作用,使得机器人附着在物体的表面,随后八个螺旋桨停止转动;其中附着过程具体为:吸盘、钩爪与粘附材料协同附着装置接触附着平面的过程中,第一减速电机正转带动绕线盘转动使拉线收紧,拉线拉动钩爪主体,与钩爪主体固定拉伸弹簧拉长并开始蓄能,粘附材料最先接触附着表面,密封住吸盘与附着的物体表面的空间,随着吸盘被抽成真空,在负压力的作用该附着装置吸附在要附着的表面,并且粘附材料由于负压产生了预压力,粘附力发挥作用;第一减速电机反转,拉伸弹簧开始释能,四个钩爪主体向中心收缩,钩爪主体上的钩或刺与附着的物体表面接触,产生切向力和法向力,实现吸盘、钩爪与粘附协同附着;
11、机器人脱附物体表面过程:吸盘、钩爪与粘附材料协同附着装置执行脱附运动;气密舱的左前上、左后下、右前上、右后下的螺旋桨反转,左后上、左后下、右前下、右后下的螺旋桨正转;每个螺旋桨都产生斜向上的力,最终合成向上的推力,使得机器人能够向下运动,从而使得水下机器人的整体脱离附着的物体;其中脱附过程具体为:吸盘、钩爪与粘附材料协同附着装置脱附的过程中,第一减速电机正转带动绕线盘转动使拉线收紧,拉绳收紧并带动钩爪主体转动,并将与之固定的拉伸弹簧拉长,钩爪主体上的钩或刺脱离附着平面,然后向吸盘充气,吸盘的顶部在气压的作用膨胀,顶着附着的平面,随着气压的不断增大,将顶开粘附材料与附着平面之间的粘附力,从而实现吸盘、钩爪与粘附材料附着装置脱附;
12、机器人在物体表面攀附与滑行的过程:首先机器人通过改变八个螺旋桨的正反转和转速调整姿态,使得机器人下方的的轮式攀附的装置正对物体的表面,之后八个螺旋桨改变转速,使得轮式攀附的装置的平衡板接触物体的表面后,轮毂开始转动,与倾斜冰层表面接触的轮毂上的对葎草仿生的双头刺由于压力的作用,将在装有扭簧的销轴上转动与轮子的转向相反的方向,并刺入冰层,从而实现沿倾斜冰面向上攀爬运动;
13、在沿倾斜冰面向上攀爬运动过程中当第二减速电机停止转动,轮毂停止转动;由于该仿生的结构在此状态下,对葎草仿生的双头刺的表面较为光滑,该装置将在冰面上滑行一段距离后,速度减至0,随后在重力的作用下,倾斜的冰面上的轮子将会反向转动,与倾斜冰层表面接触的轮毂上的对葎草仿生的双头刺将再次受到压力的作用,转向与此时的轮子转向相反,并刺入冰层,当能抵消重力时,将会相对静止在倾斜的冰层上,从而实现附着在冰层表面。
14、本发明与现有技术相比有如下优点:
15、本发明能够通过吸盘、钩爪和粘附材料协同实现水下复杂表面的附着,能够适应不同粗糙度的物体表面,使附着力更大,吸附更稳定。
16、本发明的仿葎草的轮式装置在物体表面能够攀附,仿葎草的刺可以改变角度,在不同方向上展示出不同的摩擦性,适应性强,灵活性好。
17、本发明的多螺旋桨机器人可以实现在冰层上攀附和水中的全向运动。
18、本发明能长时间附着在物体的表面,节省能源。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225730.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表