一种异形带角钢的多壁面航煤舱清洁与检测装置及方法
- 国知局
- 2024-08-01 06:59:14
本发明涉及航煤舱清洁机器人结构,尤其涉及一种异形带角钢的多壁面航煤舱清洁与检测装置及方法。
背景技术:
1、航煤舱主要用于运载航空煤油,对于舱内洁净程度要求高。同时,由于其通风条件差,无照明,航煤挥发后刺激性气体浓度高,油料具有腐蚀性,不适宜清洁人员直接进入仓内清洁。出于航煤舱清洁工作的重复性与安全性考虑,迫切需要一种自动化手段来对航煤舱进行清洁。
2、目前,国内外缺乏油舱相关清洁机器人的研究及相关专利,且多为仅可在单面完成低洁净度清洁的洗舱机器人。例如公开号为cn117104434a的中国专利“一种带有纵板的船舱壁全方位清洗装置”,其结构简单仅可完成船舱壁1.5米下平面船舱的清洗,无法满足航煤舱棱角壁面与曲面清洁,无法实现多壁面及棱角孔隙的全方位清洁;同时其仅通过擦拭布实现舱壁清洁,无法满足航煤舱高洁净度的要求。公开号为cn116750149a的中国专利“一种船舶用船舱清扫装置”,其可对船舱的底面进行清洗,但无法清洗船舱侧壁及棱角的灰尘。因此,目前业内缺乏能够满足针对航煤舱清洁的适应复杂环境、实现高洁净度清洁、高防爆标准的任务需求的机器人。
技术实现思路
1、有鉴于此,有必要提供一种异形带角钢的多壁面航煤舱清洁与检测装置及使用方法,用以解决现有技术中业内缺乏能够满足针对航煤舱清洁的适应复杂环境、实现高洁净度清洁及洁净度检测、高防爆标准的任务需求的机器人的技术问题。
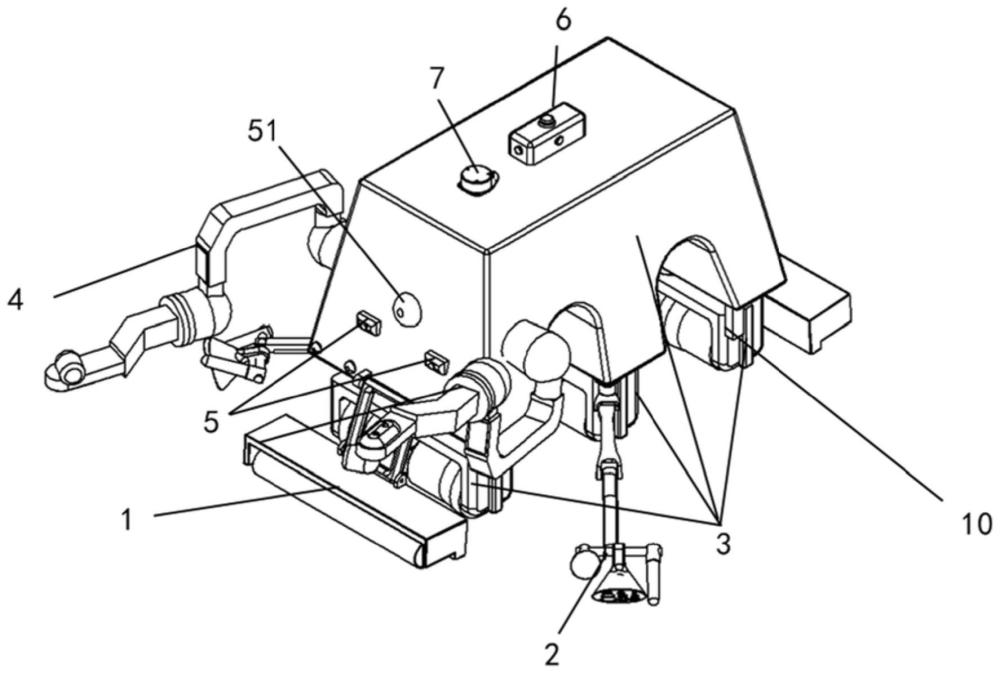
2、本发明提供一种异形带角钢的多壁面航煤舱清洁与检测装置,该异形带角钢的多壁面航煤舱清洁与检测装置包括:
3、m型伸缩与翻转式电磁运动装置,包括m型座体及电磁运动机构,所述电磁运动机构安装于所述m型座体的底部,用于带动所述m型座体在曲面与棱角壁面上移动,所述m型座体在其前后方向上的两端分别安装有可自清洁滚轴式清洁机构;
4、多自由度电磁吸附机械臂,安装于所述m型座体两侧,使所述m型座体能够在多壁面间自由翻越、并能够辅助进行精细洁净度检测;
5、非接触式柔性永磁体吸附装置,安装于所述m型座体的底面,用以辅助机器人实现稳定吸附;
6、自动避障装置,包括安装于所述m型座体底部与四周的超声传感器、视觉识别设备及三维激光雷达;
7、防电火花爆燃装置,安装于所述m型座体,用以释放压缩惰性气体;
8、多功能集成清洁装置,安装于所述m型座体,用以清洁航煤舱内的孔隙棱角、并能够检测航煤舱内壁的漆膜厚度;
9、两个内部储油仓,安装于所述m型座体的内部;
10、洁净度检测装置,包括分别安装于所述m型座体底部及所述多自由度电磁吸附机械臂的紫外荧光检测机构;以及,
11、清洁信息管理与远程控制平台,安装于所述m型座体,用于实现能源信息管理、设备工作信息反馈、远程控制与安全保护功能,并用于对所述m型座体进行监控并进行清洁路线规划设计。
12、可选地,所述电磁运动机构包括设置在所述m型座体底侧前后部的翻转式电磁吸附轮与中部的伸缩式电磁吸附轮,且当所述超声传感器测量到障碍物的距离小于等于0.1m时,所述视觉识别设备启动并判断障碍物类型,所述翻转式电磁吸附轮根据所述视觉识别设备的检测结果改变角度,且所述伸缩式电磁吸附轮根据所述视觉识别设备的检测结果改变其伸缩程度,使得所述m型座体能够在曲面壁面上行驶并翻越壁面上凸起。
13、可选地,所述m型座体的材质为铝合金,且其棱角处包覆有橡胶防撞垫。
14、可选地,所述可自清洁滚轴式清洁机构包括倾角连接臂、泡沫绸布滚轴、自清洁刮板及洁净度检测传感器,所述倾角连接臂活动安装于所述m型座体,使得其与所述m型座体之间的夹角可调,所述泡沫绸布滚轴转动安装于所述倾角连接臂,所述自清洁刮板安装于所述倾角连接臂,且部分压抵于所述泡沫绸布滚轴,以在所述泡沫绸布滚轴刮离其上粘附的污物,其中,所述倾角连接臂还对应所述泡沫绸布滚轴设有喷油口,用以朝所述泡沫绸布滚轴喷射清洁煤油,所述洁净度检测传感器安装于所述倾角连接臂,用以检测所述泡沫绸布滚轴的洁净度。
15、可选地,两个所述内部储油仓中的一个用以储存污油,另一个储存有清洁煤油、并连通所述喷油口,所述异形带角钢的多壁面航煤舱清洁与检测装置对应两个所述内部储油仓还包括两组吸油泵及柔性永磁吸附伸缩管,所述吸油泵安装于对应的所述内部储油仓中,所述柔性永磁吸附伸缩管一端连通同组的所述吸油泵。
16、可选地,所述多功能集成清洁装置包括多自由度清洁机械臂、小型盘刷、莲蓬状集成清洁检测机构及绸布辊刷,所述多自由度清洁机械臂一端连接于所述m型座体,所述小型盘刷与所述多自由度清洁机械臂之间连接有多自由度连接杆,所述莲蓬状集成清洁检测机构包括莲蓬座、伸缩式漆膜厚度检测仪及多个伸缩柱状刷,多个所述伸缩柱状刷的直径各异,以在所述超声传感器及所述视觉识别设备判定待清洁处大小后,伸出对应直径的所述伸缩柱状刷进行棱角孔隙及角钢的清洁,所述莲蓬座安装于所述多自由度清洁机械臂,所述伸缩式漆膜厚度检测仪及多个所述伸缩柱状刷分别可伸缩地安装于所述莲蓬座的腔体内。
17、可选地,多个所述伸缩柱状刷的型号各异,且所述莲蓬座的中部设有多个连通油口,多个所述连通油口分别连通两个所述内部储油仓,且在对应的连通管路上设有泵体。
18、此外,本发明还提供一种异形带角钢的多壁面航煤舱清洁与检测方法,所述异形带角钢的多壁面航煤舱清洁与检测装置为如上所述的异形带角钢的多壁面航煤舱清洁与检测装置,其包括以下步骤;
19、人工于舱内放置初始化定位标识,所述异形带角钢的多壁面航煤舱清洁与检测装置进入舱室后,扫描人工设定的位置校准点,确定自身位置信息并进行初始化定位校准,并以此为基点进行三维模型构建,绕舱体环行一周并通过三维激光雷达扫描构建三维模型,并导入船舱原有三维模型进一步完善模型细节,完成三维模型构建后机器人回到初始位置;
20、通过实时更新所述异形带角钢的多壁面航煤舱清洁与检测装置于各方向位移,结合三维模型并实施根据位移量更新所述异形带角钢的多壁面航煤舱清洁与检测装置于模型中所处位置,实现密闭环境下机器人定位,通过超声传感器检测船舱中特殊特征与所述异形带角钢的多壁面航煤舱清洁与检测装置之间的距离以对其定位进行实时修正;
21、基于双向搜索的jps算法,结合船舱三维模型进行清洁路线规划,并结合荧光清洁度检测结果判定待清洁位置,于构建的船舱三维模型中标记待清洁点,根据其判定的污染程度规划二次清洁路径与清洁时间;
22、在运动的过程中,对超声传感器测距数值进行判断,当障碍物的距离值小于等于0.1m,通过视觉识别设备结合超声传感器判定障碍类型,并对后续行为进行决策,当障碍物为船舱肋板等高度相对较低的障碍则进行翻越,所述翻越过程为,机器人向前继续行驶,依次进行前翻转式电磁吸附轮向上翻转、中部伸缩式电磁吸附轮伸缩、后翻转式电磁吸附轮向上翻转,各轮依次跨越障碍实现障碍跨越,当障碍物高于机器人,判断障碍物为另一壁面或障碍物,进行后续壁面跨越或停止前进并转向的操作,距障碍物的距离值大于0.1m时恢复正常前进。
23、可选地,所述的人工于舱内放置初始化定位标识,所述异形带角钢的多壁面航煤舱清洁与检测装置进入舱室后,扫描人工设定的位置校准点,确定自身位置信息并进行初始化定位校准,并以此为基点进行三维模型构建,绕舱体环行一周并通过三维激光雷达扫描构建三维模型,并导入船舱原有三维模型进一步完善模型细节,完成三维模型构建后机器人回到初始位置包括以下步骤:
24、所述异形带角钢的多壁面航煤舱清洁与检测装置电磁吸附于航煤舱壁,并通过扫描航煤舱预设位置进行初始化定位校准,且绕舱体环行一周并通过三维激光雷达采集激光点云信息,通过该激光光束的发射与接收时间差,获取物体与扫描头之间的距离,通过对点云信息进行全方位的数据分析整合,在预设的空间方位中,通过slam三维重建算法同步生成航煤舱的数据信息,以此建立精准的三维空间模型,对航煤舱进行真实的还原和复制。
25、与现有技术相比,本发明的有益效果在于:
26、本发明解决了现有洗舱机器人智能化程度低,清洁能力差,针对航煤舱高洁净度清洁要求的前提下缺乏清洁手段,多采用人工清洁的问题;
27、通过可自清洁滚轴式清洁机构与多功能集成清洁装置结合,实现平面及棱角壁面不同环境下的高效高洁净度清洁,同时通过精细洁净度检测与大面积洁净度检测结合的检测方式保障航煤舱清洁高洁净度要求,在进行高洁净度清洁的同时实现对航煤舱壁漆面厚度的自动化检测与待补漆点标记,进一步提高机器人功能集成化程度,提高工作效率,保障航煤舱耐腐蚀性;
28、本发明通过m型伸缩与翻转式电磁运动装置与多自由度电磁吸附机械臂结合的运动结构,解决了现有洗舱机器人运动结构较为简单,难以在航煤舱直角壁面、曲面壁面与壁面棱角等复杂环境下移动的问题。通过机器人m形结构与各组电磁运动轮伸缩翻转运动可实现复杂运动条件下的移动翻越与稳定吸附功能;
29、航煤舱直角壁面凭借现有洗舱机器人运动结果难以实现翻越,多自由度电磁吸附机械臂辅助机器人的电磁运动机构,实现不同直角壁面间的翻越。通过两种运动结构结合,机器人实现航煤舱多壁面复杂条件下的稳定运动。
30、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以本发明的较佳实施例并配合附图详细说明如下。本发明的具体实施方式由以下实施例及其附图详细给出。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225722.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表