一种基于水下航行器式的AUV回收与投放装置
- 国知局
- 2024-08-01 06:58:38
本发明涉及auv回收设备,尤其涉及一种基于水下航行器式的auv回收与投放装置。
背景技术:
1、传统auv(自主水下机器人)的回收形式通常依靠大型船舶通过人工操作使用起重设备或绳索将auv从水下捞到水面上将其回收,这样的回收方式受到人工技术、作业时间、作业环境、作业设备等因素的制约,导致传统auv的回收形式存在人力成本高、时间消耗大、风险高和限制性强等问题。
2、近年来,随着传感器、控制系统及通信技术的飞速发展,auv回收装置在定位准确性、操作稳定性以及回收速度等方面都取得了巨大突破。这些技术进步催生了众多不同回收机制的auv回收装置。其中,水下航行器式auv回收装置因其具有的水下航行方式使其能够精确到达指定位置,具备较高的灵活性,因此受到了广泛的应用。
3、但现有的水下航行器式auv回收装置在实际应用的过程中仍存在一些问题。首先,一些水下航行器式auv回收装置的外壳设计往往未能充分考虑到水下航行的阻力,导致能效不佳和航行速度受限;其次,现有的auv回收装置只能对单一尺寸或单一型号的auv设备进行回收,难以适应对不同尺寸不同形状的auv设备回收,也无法满足各类auv设备的多样化存储需求,使得回收及储存难以实现或操作变得复杂且效率低下。另外,由于长期位于水下工作,工作时受到的振动和冲击会对设备和结构造成损害,使用寿命较短。
技术实现思路
1、本发明的目的在于提出一种基于水下航行器式的auv回收与投放装置,以解决上述背景技术中存在的一个或多个技术问题。
2、为达此目的,本发明采用以下技术方案:
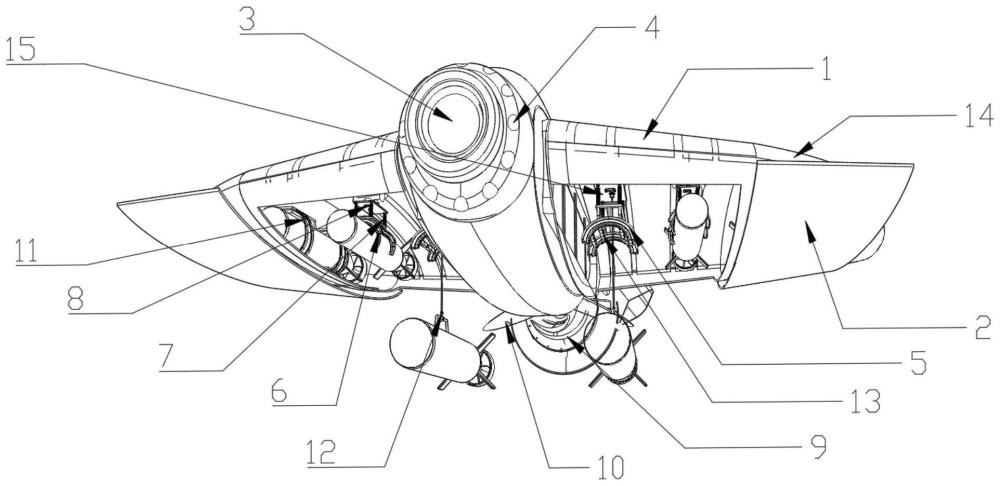
3、一种基于水下航行器式的auv回收与投放装置,包括仿生载体、回收组件、储存组件和动力组件;所述仿生载体的翼部开设有开口向下的回收腔,所述回收腔的一侧开设有相连通的储存腔,所述回收组件设在所述回收腔内,所述储存组件设在所述储存腔内;所述动力组件设在所述仿生载体的艉部和翼部;
4、所述回收组件包括前后平移平台、升降机构和回收夹持单元,所述前后平移平台设在所述回收腔内,所述升降机构设在所述前后平移平台的移动端,所述回收夹持组件设在所述升降机构的升降端,所述前后平移平台和所述升降机构用于带动所述回收夹持单元前后及升降移动,所述回收夹持单元用于夹持auv设备;
5、所述储存组件包括储存平移机构和储存夹持单元,所述储存平移机构设在所述储存腔内,所述储存夹持单元设在所述储存平移机构的移动端,所述储存平移机构用于带动所述储存夹持单元在所述储存腔和回收腔之间移动;
6、回收auv设备时,所述动力组件带动所述仿生载体移动到目标auv设备的上方,所述前后平移平台和所述升降机构驱动所述回收夹持单元靠近auv设备,待所述回收夹持单元对auv设备夹持后,所述升降机构驱动所述回收夹持单元返回到所述回收腔中;
7、储存auv设备时,所述储存平移机构驱动所述储存夹持单元横向伸出进入所述回收腔中,并使储存夹持单元夹持所述回收夹持单元上的auv设备,待所述回收夹持单元释放auv设备后,所述储存平移机构驱动所述储存夹持单元返回到储存腔中。
8、优选的,所述回收组件还包括升降吊钩,所述升降挂钩设在所述前后平移平台上;回收auv设备时,先释放所述升降吊钩,使所述升降吊钩靠近并勾取auv设备的吊环,然后通过升降吊钩的牵引使auv设备靠近所述回收夹持单元,在所述回收夹持单元对auv设备夹持后,所述升降吊钩与auv设备脱离。
9、优选的,所述升降吊钩包括卷扬器、升降吊索、旋转关节和机械挂钩,所述卷扬器设在所述前后平移平台的活动端,所述升降吊索的一端卷绕在所述卷扬器上,所述升降吊索的另一端与所述旋转关节相连,所述机械挂钩设在所述旋转关节的活动端。
10、优选的,所述回收组件还包括旋转机构,所述旋转机构设在所述升降机构的升降端,所述回收夹持单元设在所述旋转机构的转动端,所述旋转机构上设有力觉传感器,所述旋转机构用于带动所述回收夹持单元与所述前后平移平台发生水平相对旋转。
11、优选的,所述回收夹持单元包括前后设置的两个弧形机械爪,两个所述弧形机械爪均与所述旋转机构的转动端相连,所述弧形机械爪的内侧设有弧形驱动结构和辅助副爪,所述弧形驱动结构用于带动所述辅助副爪沿所述弧形机械爪的内侧移动,所述辅助副爪上还设有智能感知交互器,所述智能感知交互器用于获取目标auv设备的位置和尺寸。
12、优选的,所述储存夹持单元包括升降夹持平台和开合式软体机械爪,所述升降夹持平台设在所述储存平移机构的移动端,所述开合式软体机械爪分别设在所述升降夹持平台的上下两端,所述升降夹持平台用于带动两个所述开合式软体机械爪靠近或分离,所述开合式软体机械爪用于向内收拢与auv设备贴合或向外张开远离auv设备。
13、优选的,所述升降机构包括多个辅助伸缩减震单元和升降支架,多个所述辅助伸缩减震单元均与所述前后平移平台相连,多个所述辅助伸缩减震单元的伸缩端均与所述升降支架相连,所述辅助伸缩减震单元包括固定件、连接关节、伸缩杆和减震弹簧,所述固定件设在所述前后平移平台的底部,所述伸缩杆的杆体顶端通过所述连接关节铰接于所述固定件,所述伸缩杆的外侧套设有所述减震弹簧。
14、优选的,所述动力组件包括推进机构,所述推进机构包括动力泵、喷口、导向管、转向泵和转向挡板,所述动力泵设在所述仿生载体的艉部,所述仿生载体的艉部还设有进水口和入水管,所述动力泵的输入端与所述进水口相连,所述动力泵的输出端设有喷口,所述导向管设在所述动力泵的上方,所述导向管的开口部朝左右两侧设置,所述转向泵和所述转向挡板均设在所述导向管内,所述转向泵的输入端与所述入水管相连,所述转向泵的输出端与所述导向管连通,所述转向挡板用于改变所述转向泵与所述导向管两开口部的连通状态。
15、优选的,所述动力组件还包括辅助动力阀,所述辅助动力阀设在所述仿生载体的翼部,所述辅助动力阀为特斯拉阀。
16、优选的,所述仿生载体的轮廓为流线型机械外壳,所述仿生载体的两侧设有呈45°斜分布翼状机械鳍片,所述仿生载体的艏部还设有水下摄像头和环形照明灯,所述环形照明灯设在所述水下摄像头的外侧;
17、所述仿生载体的翼部还设有舱室开合底板,所述舱室开合底板用于遮挡或敞开所述回收腔。
18、与现有技术相比,本发明具有以下有益效果:
19、1、通过设置轮廓为流线型机械外壳的仿生载体,减小了装置在水下航行阻力,通过推进机构和辅助动力阀提供推进动力,使得装置具备快速响应、精确控制、节能环保和可远程控制等功能;
20、2、设置回收夹持单元和储存夹持单元分别对auv设备进行回收及储存,回收夹持单元和储存夹持单元均能够自适应调节,实现对不同尺寸和大小的auv设备进行回收,灵活使用不同环境,克服了回收装置单一的问题;
21、3、通过设置辅助伸缩减震单元,减少回收夹持单元在水下工作时受到的振动和冲击,提高回收的安全性,增加设备和结构的寿命同时提高工作效率;
22、4、通过设置储存平移机构和储存夹持单元,搭配前后平移平台、升降机构和回收夹持单元的动作实现对auv设备的进一步容纳和存储功能,解决了存放方式单一的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表