-
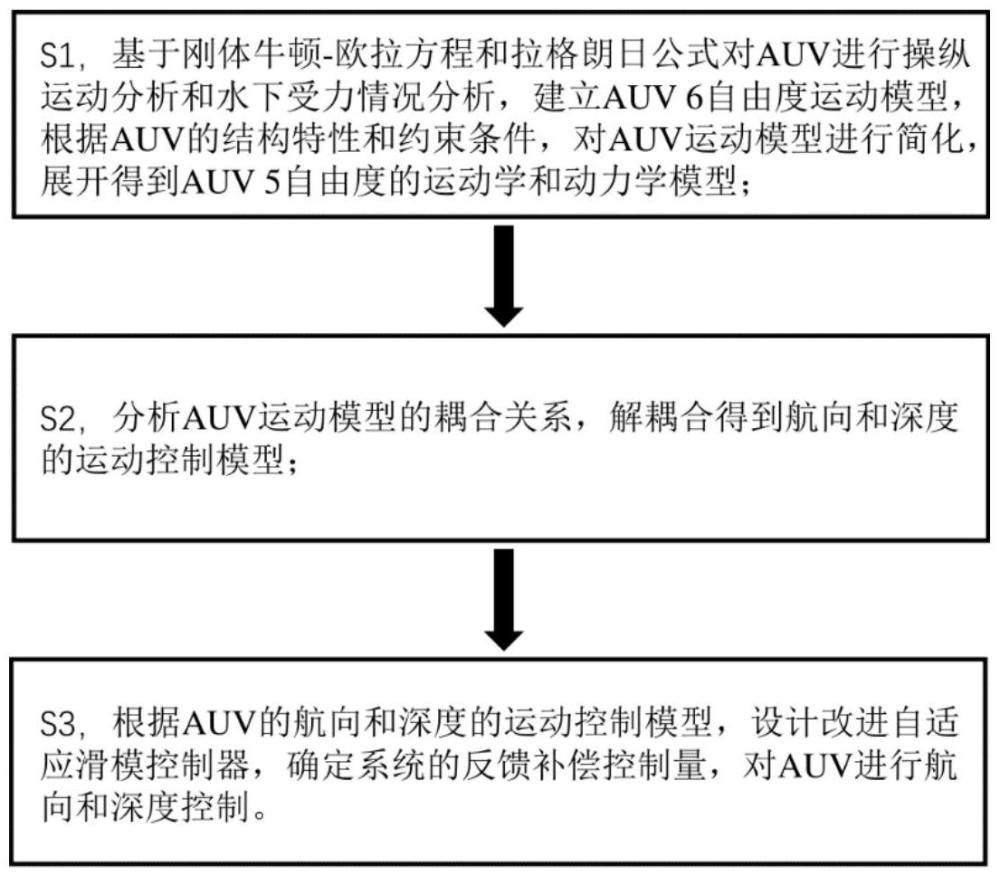
一种基于改进自适应滑模的AUV运动控制方法
本发明属于自主水下航行器,尤其涉及一种基于改进自适应滑模的auv运动控制方法。背景技术:1、自主水下航行器在海洋探索、海底测绘、资源勘探、海底油气管线巡检等领域扮演着重要角色。然而,由于水下环境复杂多......
-
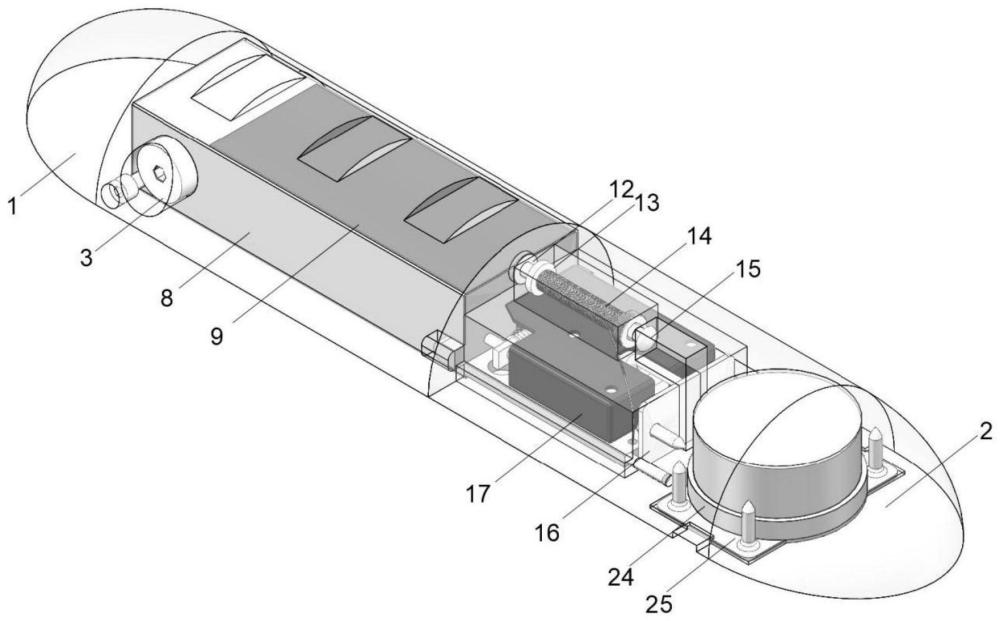
一种基于浅海域AUV实验的应急弹射浮漂定位装置
本发明涉及水下无人航行器,尤其涉及一种基于浅海域auv实验的应急弹射浮漂定位装置。背景技术:1、随着海洋资源的不断开发,水下潜航器变得越来越多功能化,使得水下潜航器要搭载更多传感器与精密设备,这就导致......
-

AUV布放装置及布放船的制作方法
本申请涉及水下机器人,尤其涉及一种auv布放装置及布放船。背景技术:1、无人自主水下机器人(auv) 是新一代水下机器人,具有活动范围大、机动性好、安全、智能化等优点,因此成为完成各种水下任务的重要工......
-
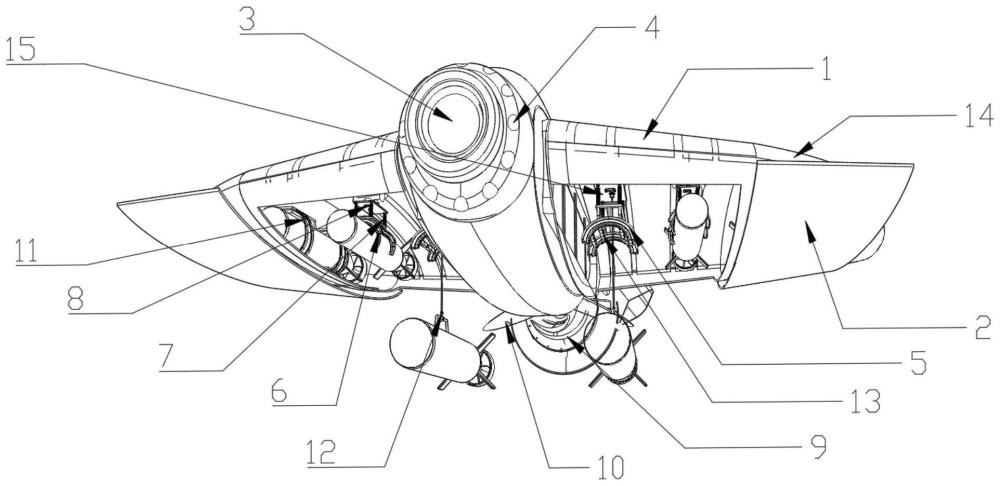
一种基于水下航行器式的AUV回收与投放装置
本发明涉及auv回收设备,尤其涉及一种基于水下航行器式的auv回收与投放装置。背景技术:1、传统auv(自主水下机器人)的回收形式通常依靠大型船舶通过人工操作使用起重设备或绳索将auv从水下捞到水面上......
-

一种双轮盘AUV自动回收投放装置
本发明涉及auv回收装置,尤其涉及一种双轮盘auv自动回收投放装置。背景技术:1、随着科学技术的进步和人类对海洋资源的渴求,人类对海洋资源的探测技术已经到了一个前所未有的高度,日渐成熟的技术以及不断更......
技术新讯 > AUV > 列表
 2024-09-11
2024-09-11精选技术
-
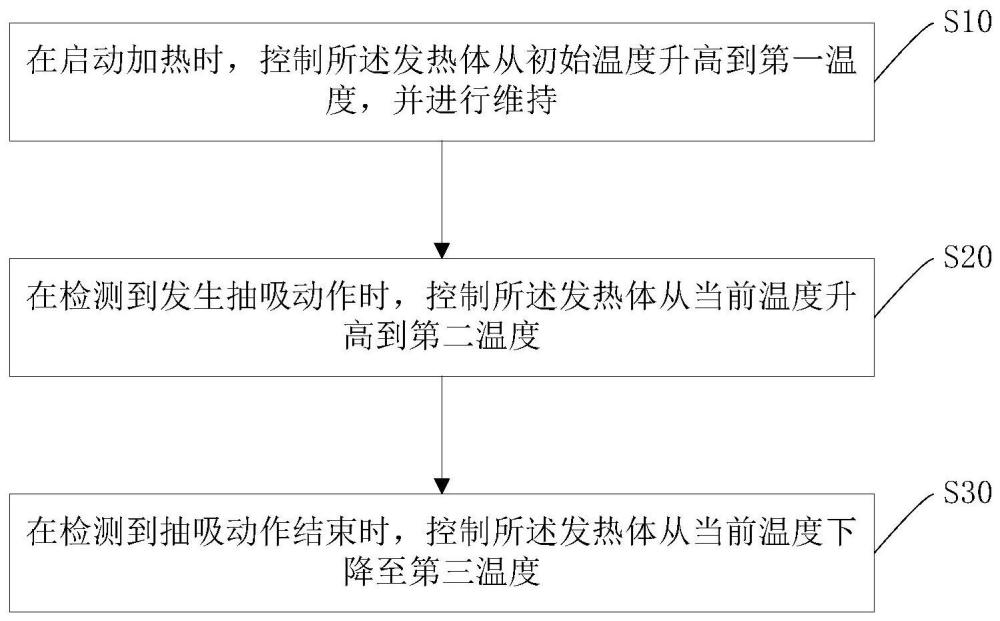
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01