一种基于改进自适应滑模的AUV运动控制方法
- 国知局
- 2024-09-11 14:27:25
本发明属于自主水下航行器,尤其涉及一种基于改进自适应滑模的auv运动控制方法。
背景技术:
1、自主水下航行器在海洋探索、海底测绘、资源勘探、海底油气管线巡检等领域扮演着重要角色。然而,由于水下环境复杂多变,存在水流扰动、水压变化等不确定因素,对auv的精确控制提出了挑战。传统的pid控制虽然结构简单,但在处理非线性、强耦合的auv动力学模型时效果有限,传统滑模控制虽然能够处理非线性系统,但控制输出容易发生抖振现象,不仅损害执行机构,还可能增加能耗和降低控制精度。因此,开发一种能够有效应对环境扰动、提高控制稳定性和鲁棒性的新型控制策略显得尤为重要。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于改进自适应滑模的auv运动控制方法,以解决上述现有技术存在的问题。
2、为实现上述目的,本发明提供了一种基于改进自适应滑模的auv运动控制方法,包括:
3、基于auv携带的传感器采集auv水下航向信息,对所述auv水下航向信息进行预处理得到目标观测信息;
4、对所述目标观测信息进行运动分析得到auv运动模型;
5、解耦合所述auv运动模型得到航向运动控制模型和深度运动控制模型;
6、基于所述航向运动控制模型和深度运动控制模型设计改进自适应滑模控制器实现auv的航向和深度控制。
7、可选地,所述水下航向信息包括但不限于auv位置、姿态、速度和加速度。
8、可选地,对所述auv水下航向信息进行预处理得到目标观测信息的过程包括:
9、对所述auv水下航向信息进行低通滤波处理得到低通滤波后的信息;
10、将所述低通滤波后的信息进行数据融合得到所述目标观测信息。
11、可选地,对所述目标观测信息进行运动分析得到auv运动模型的过程包括:
12、基于所述目标观测信息采用刚体牛顿-欧拉方程和拉格朗日公式建立6自由度的运动学模型和动力学模型;
13、对所述6自由度的运动学模型和动力学模型进行简化得到5自由度的运动学模型和动力学模型。
14、可选地,所述5自由度的运动学模型的表达式为:
15、
16、式中,为auv在大地坐标系下的速度,u、v、w、q、r为auv动坐标系下的速度,ψ、θ为auv的航向角和纵倾角;
17、5自由度的动力学模型的表达式为:
18、
19、式中,为auv动坐标系下的加速度,为auv的惯性类水动力系数,xuu、xwq、xvr、xqq、xrr为auv在x轴方向上的黏性类水动力系数,yrr、yvv、yuv、yur为auv在y轴方向上的黏性类水动力系数,zuq、zww、zqq、zuw为auv在z轴方向上的黏性类水动力系数,nvv、nuv、nur、nrr为auv绕z轴方向上的黏性类水动力系数,muw、mqq、mww、myuq为auv绕y轴方向上的黏性类水动力系数,du、dv、dw、dr、dq为海流产生的干扰,m为auv的质量,izz、iyy为绕z、y轴的转动惯量,zb为浮心相对重心的距离,b为浮力大小,t为螺旋桨提供的推力,τr、τq为auv舵翼提供的航向控制力和纵倾控制力。
20、可选地,所述航向运动控制模型为:
21、
22、式中,为大地坐标系下的航向角速度,u、r为auv动坐标系下的纵向速度和航向角速度,为auv的惯性类水动力系数,nur、nrr为auv的黏性类水动力系数,τr为auv舵翼提供的航向控制力;
23、所述深度控制模型为:
24、
25、式中,为auv在大地坐标系下的垂向速度和纵倾角速度,u、q为auv动坐标系下的纵向速度和纵倾角速度,为auv的惯性类水动力系数,mqq、muq为auv的黏性类水动力系数,zb为浮心相对重心的距离,b为浮力大小,τq为auv舵翼提供的纵倾控制力。
26、可选地,基于所述航向运动控制模型,构建航向控制器的积分滑模面,所述航向控制器的积分滑模面的计算公式为:
27、
28、式中,sψ为航向角速度误差的积分滑模面,re为航向角速度误差,c2为大于零的正常数。
29、可选地,基于所述深度控制模型,构建所述深度控制器的滑模面,所述深度控制器的滑模面的计算公式为:
30、
31、式中,sθ为纵倾角误差的积分滑模面,θe为纵倾角误差,c2、c3为大于零的正常数。
32、与现有技术相比,本发明具有如下优点和技术效果:
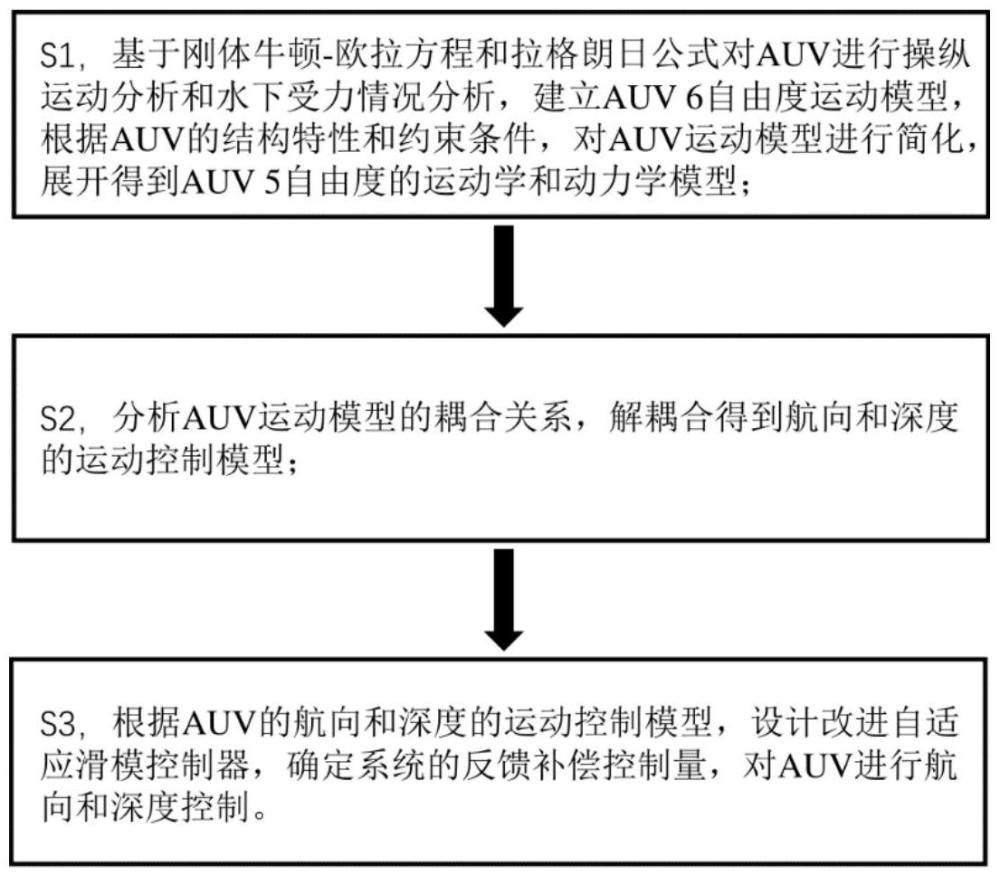
33、(1)基于刚体牛顿-欧拉方程和拉格朗日公式对auv进行操纵运动分析和水下受力情况分析,建立auv 6自由度运动模型,根据auv的结构特性和约束条件,对auv运动模型进行简化,展开得到auv 5自由度的运动学和动力学模型,该简化模型减少了计算量,提高了控制效率;(2)分析auv运动模型的耦合关系,解耦合得到航向和深度的运动控制模型,可以减少强耦合对auv水下航向过程造成的干扰;(3)改进自适应滑模控制算法,可以解决传统滑模控制输出抖振问题,引入的积分项更是可以加快误差收敛和消除外界干扰和水动力参数不确定性对auv水下航向过程造成的干扰,使控制器获得了自适应能力,提高auv的舵机的使用寿命和运动控制的稳定性、精度。
技术特征:1.一种基于改进自适应滑模的auv运动控制方法,其特征在于,包括:
2.根据权利要求1所述的基于改进自适应滑模的auv运动控制方法,其特征在于,所述水下航向信息包括但不限于auv位置、姿态、速度和加速度。
3.根据权利要求1所述的基于改进自适应滑模的auv运动控制方法,其特征在于,对所述auv水下航向信息进行预处理得到目标观测信息的过程包括:
4.根据权利要求1所述的基于改进自适应滑模的auv运动控制方法,其特征在于,对所述目标观测信息进行运动分析得到auv运动模型的过程包括:
5.根据权利要求4所述的基于改进自适应滑模的auv运动控制方法,其特征在于,
6.根据权利要求1所述的基于改进自适应滑模的auv运动控制方法,其特征在于,
7.根据权利要求6所述的基于改进自适应滑模的auv运动控制方法,其特征在于,基于所述航向运动控制模型,构建航向控制器的积分滑模面,所述航向控制器的积分滑模面的计算公式为:
8.根据权利要求7所述的基于改进自适应滑模的auv运动控制方法,其特征在于,基于所述深度控制模型,构建所述深度控制器的滑模面,所述深度控制器的滑模面的计算公式为:
技术总结本发明公开了一种基于改进自适应滑模的AUV运动控制方法,属于自主水下航行器领域,该方法包括以下步骤:基于AUV携带的传感器采集AUV水下航向信息,对AUV水下航向信息进行预处理得到目标观测信息;对目标观测信息进行运动分析得到AUV运动模型;解耦合AUV运动模型得到航向运动控制模型和深度运动控制模型;基于航向运动控制模型和深度运动控制模型设计改进自适应滑模控制器实现AUV的航向和深度控制。技术研发人员:陈庆东,袁剑平,柴卓辉,钟耀鹏,李佳韵,罗智洵受保护的技术使用者:广东海洋大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290900.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表