一种用于测试设备的自适应调整的控制系统
- 国知局
- 2024-09-11 14:26:52
本发明涉及测试设备的控制系统,特别涉及一种用于测试设备的自适应调整的控制系统。
背景技术:
1、在现有的工业控制系统中,设计人员通常需要通过编程来实现各种复杂的控制逻辑。这些编程工作不仅要求设计人员具备较高的编程技能,而且还需要花费大量的时间和精力进行代码的编写、调试和维护。
2、传统的编程方式往往难以满足高精度和高效率控制的设备,如压力脉冲测试设备的需求,导致测试结果的准确性和效率受到影响。
技术实现思路
1、针对传统的编程方式往往难以满足高精度和高效率控制的设备,且编程难度较高的问题,本发明提出了一种用于测试设备的自适应调整的控制系统。
2、本发明提供以下技术方案:
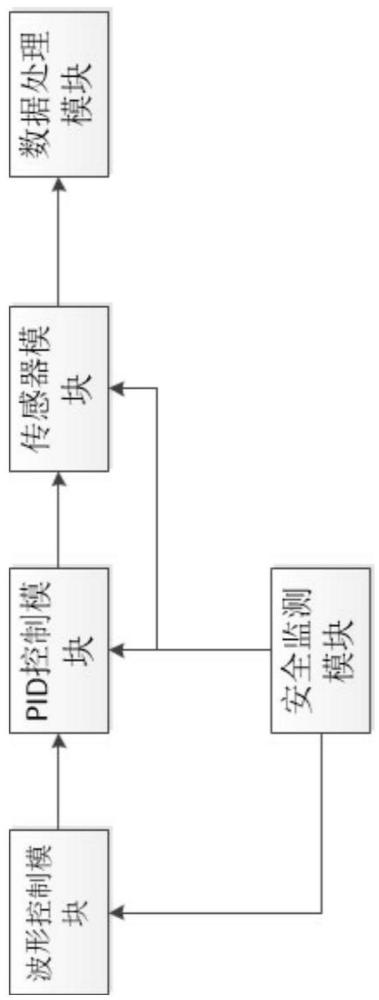
3、一种用于测试设备的自适应调整的控制系统,所述系统包括:
4、波形控制模块,用于选择或生成不同波形完成对参数的控制,且所述波行通过图形化的配置界面进行调整生成;
5、pid控制模块,用于使系统能够根据实时的环境和参数变化进行自适应调整;
6、传感器模块,用于实现对物理量的实时监测与数据融合;
7、数据处理模块,用于对采集的数据和信号进行处理,确保数据与信号的准确性;
8、安全监测模块,用于实时监测异常情况,并在必要时发出报警信号。
9、进一步地,所述波形控制模块选择的波形包括正弦波、三角波、梯形波和水锤波。
10、进一步地,在所述波形控制模块中,还包括:构建波形生成模型,用于将波形参数化表述;其中,所述波形表示如下:
11、所述正弦波的向量ps表示为:ps=[as,fs,φs];
12、所述三角波的向量pt表示为:pt=[at,ft,φt,dt];
13、所述梯形波的向量pr表示为:pr=[ar,fr,φr,wr];
14、所述水锤波的向量pw表示为:pw=[aw,fw,φw,pw];
15、其中,as表示正弦波的振幅;fs表示正弦波的振幅频率;φs表示正弦波的相位;at表示三角波的振幅;ft表示三角波的振幅频率;φt表示三角波的相位;dt表示三角波的占空比;ar表示梯形波的振幅;fr表示梯形波的振幅频率;φr表示梯形波的相位;wr表示梯形波的脉宽;aw表示水锤波的振幅;fw表示水锤波的振幅频率;φw表示水锤波的相位;pw表示梯形波的水锤效应参数。
16、进一步地,在所述波形控制模块中,还包括:设计图像化配置页面;其中,正弦波、三角波、梯形波和水锤波分别设有独立的图像化配置页面,用户通过在图像化配置页面中拖动滑块或输入数值调整波形参数;所述图像化配置页面实时显示波形变化,表示如下:
17、所述正弦波的图像化配置页面表示如下:
18、ys(t)=assin(2πfst+φs)
19、其中,ys(t)表示正弦波函数,fst表示t时刻正弦波的振幅频率;
20、所述三角波的图像化配置页面表示如下:
21、
22、其中,yt(t)表示三角波函数,n表示傅立叶级数中的谐波序号;ftt表示t时刻三角波的振幅频率;
23、所述梯形波的图像化配置页面表示如下:
24、
25、其中,yr(t)表示梯形波函数,表示周期,wr表示脉宽,fr表示梯形波的频率,mod表示取模运算,t表示时刻;
26、所述梯形波的图像化配置页面表示如下:
27、
28、其中,yw(t)表示水锤波函数;pw表示水锤效应参数,表示波动衰减的时间常数;fwt表示t时刻梯形波的振幅频率。
29、进一步地,在所述波形控制模块中,还包括:构建结合进化算法和深度学习的自适应波形调整算法,用于根据实时反馈自动调整波形参数p;其中,所述构建自适应波形调整算法,包括以下步骤:
30、构建波形参数p的损失函数e(p),表示如下:
31、
32、其中,ydesired(ti)表示期望的波形值;yactual(ti,p)表示当前参数p生成的实际波形值;n表示采样点数量,ti表示定义或测量波形期间选择的特定时间点;
33、随机生成一组波形参数向量p1,p2,…,pm作为初始种群,并计算每个个体的适应度,根据适应度选择适应度高的个体作为父代,表示如下:
34、
35、其中,pselect(i)表示选择第i个个体的概率,m表示初始种群中波形参数向量的总数,j表示在求和操作中的索引;
36、将父代个体进行交叉操作,生成新的子代个体:设pa和pb为两个父代个体,通过交叉生成子代个体pnew,表示如下:
37、pnew=αpa+(1-α)pb
38、其中,α表示交叉系数,0≤α≤1;
39、对部分子代个体进行随机变异:设pmut为变异后的个体,计算如下:
40、pmut=p+βn(0,1)
41、其中,β表示变异系数,n(0,1)表示标准正态分布的随机变量。
42、进一步地,以进化算法产生的子代个体作为初始参数,引入深度学习算法对波形参数p进行优化,具体包括:
43、使用lstm网络预测未来的波形误差序列其中k为预测步数,lstm网络的输入为当前的波形参数pinit及其对应的误差序列et-k:t,表示如下:
44、
45、其中,表示lstm网络预测的未来k步的误差序列,lstm表示lstm网络模型;
46、结合预测的误差序列和当前的波形参数pinit,定义多目标优化函数popt,所述多目标优化函数popt包括误差最小化和参数平滑性,表示如下:
47、
48、其中:α1,α2表示权重参数,分别表示误差最小化和参数平滑性的权重;表示波形参数p的二阶时间导数,用于衡量参数的平滑性;k表示步数的长度,表示找参数集p,使得目标优化函数最小,表示在时刻t+i;的预测误差值,表示偏导数符号;
49、使用梯度下降法进行迭代优化,更新波形参数p,且每次迭代中,根据多目标优化函数计算梯度并更新参数,表示如下:
50、
51、其中,η表示学习率;表示对波形参数p的梯度计算。
52、进一步地,所述pid控制模块包括模糊pid自适应控制器、内模复合pid控制器、eso内模耦合模糊pid控制器,依据环境和参数变化进行自适应调整。
53、进一步地,所述传感器模块包括位移传感器、温度传感器和压力传感器,用于对物理量的实时监测和数据融合,提供系统对环境变化的感知。
54、进一步地,所述数据处理模块集成数据清洗模块和信号处理模块,所述数据清洗模块包括缺失值清洗、重复值清洗、缺失值补充、阈值限定;所述信号处理模块包括信号平稳处理、信号加窗、傅里叶变换、短时傅里叶变换、峰值提取、滤波器设计。
55、进一步地,所述信号平稳处理通过以下计算得到平滑的信号:
56、
57、式中,λ[k]表示平滑后的信号,ω[n]为原信号处理中的影响系数,ψ*[k-n]为预设函数的共轭函数,k为时间序列对应的特定数据组,n为时间序列中的一个数据点n;
58、所述峰值提取通过如下方法提取:
59、
60、其中,peak(t)是t处的峰值,data[t:t+w]为t到t+w范围内的数据,max(data)为整个数据的峰值。
61、本发明相比现有技术具有以下优点:
62、(1)本发明采用了组态化无代码的设计方式,使得用户无需编写复杂的代码就能构建和配置控制系统。这种设计方式大大降低了使用门槛,提高了系统的易用性和可维护性,同时减少了开发和部署时间。
63、(2)本发明结合组态化无代码的特点,本发明提供了多种控制方式,如pid控制器、模糊pid自适应控制器等,可以通过简单的拖拽和配置,实现不同的控制策略,满足各种复杂的控制需求。
64、(3)本发明的创新波形控制方案通过结合进化算法和深度学习方法,使用参数化模型生成波形,并通过图形化配置界面调整波形参数。自适应波形调整算法根据实时反馈优化波形参数,确保波形满足特定测试要求。该方法可以有效提高测试设备的性能,满足复杂测试环境中的高精度和高效率需求。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290843.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表