一种农用收获机械的负荷控制方法、装置和应用与流程
- 国知局
- 2024-09-11 14:25:07
本发明涉及农用机械,具体而言,涉及一种农用收获机械的负荷控制方法、装置和应用。
背景技术:
1、农用收获机械属于一种常规且已经得到大规模应用的农用机械,包括但不限于农用收割机、农用割晒机等,实际生产中还涉及大量的针对特定农作物的特种收获机,如玉米割晒机、稻麦收割机等等,或是针对根茎作物、谷物作物、花卉作物等不同作物类型和收获需求进行作业的特种收获机。
2、智能化的农用机械得益于日渐发展的人工智能、物联网、大数据等技术,其作业运行更加自动化、精准化和高效化,能够独立地实现犁地、耕种、播种、施肥、灌溉、收获等一系列生产行为,有效地提高了农业生产的质量与效率,同时还大大降低了对人力的需求以及人工操作的工作强度。从现行研究发展看,智能化的农用收获机械也得到了发展进步与应用。
3、目前多数收获机械的负荷控制系统主要依靠已发生事件建立控制模型,如滚筒转速、收获仓内剩余容量或质量等,基于已发生事件所获取的参量进行收获机械的负荷控制的构件并控制收获机械的运行模式。举例而言,某收获机械的负荷控制系统中在轴流滚筒处设置有转速传感器,实时测量轴流滚筒转速spd,当spd≥spd0(设定的阈值转速)时,控制器则认为收割负荷过大,有堵塞风险,进而输出控制信号控制行走泵分级降低电流输出;反之当spd<spd0时,控制器则解除限制,行走泵逐步恢复电流输出。
4、但是,在实际收获作业的过程中,在未根据待收获作物的长势、密度、含水率等参数进行实时反馈调控时,仅凭已发生事件的参量进行控制,面对联合收获机非线性与大时滞性的作业过程,明显存在控制效果不够理想的缺陷。仍以上文中的以转速传感器为实时变量的负荷控制系统为例,该负荷控制系统通过监控滚筒转速的变化来判断车辆负荷,具有较大迟滞性与突变性,很难做到线性地、及时地对作业单元进行控制;同时地,该负荷控制系统存在喂入量突然过大而导致的堵塞熄火的风险,这容易导致收获机器的动力模块或作业单元的损耗乃至损坏。
5、有鉴于此,特提出本发明。
技术实现思路
1、本发明的第一目的在于提供一种农用收获机械的负荷控制方法,通过估算作物种植密度以及通过水分检测传感器测得作物含水率后,经由数据计算依次获取作物质量和收获机械的通行速度,进而保持收获负荷的稳定性。
2、本发明的第二目的在于提供一种农用收获机械的负荷控制装置。
3、本发明的第三目的在于提供一种农用收获机械。
4、为了实现本发明的上述目的,特采用以下技术方案:
5、一种农用收获机械的负荷控制方法,包括:
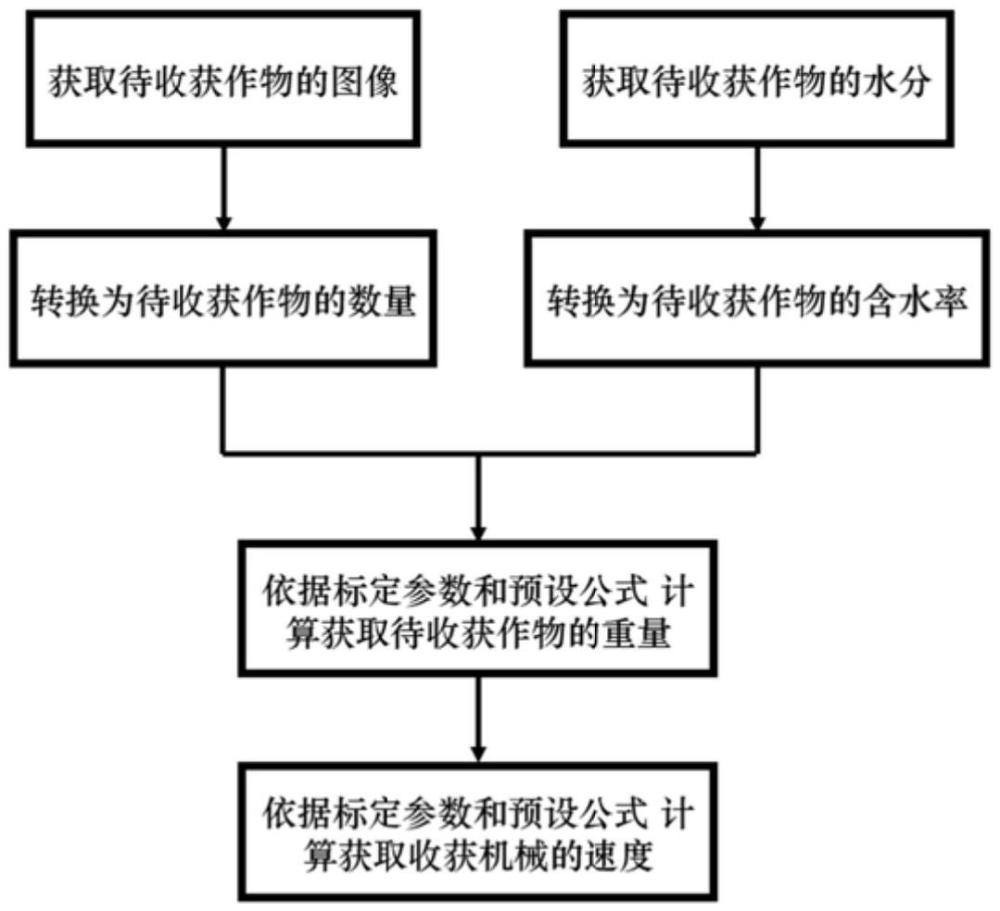
6、实时获取单位空间内的待收获作物的图像和水分值,并同步转换为待收获作物的数量和含水率;
7、通过所述数量和所述含水率计算获取对应单位空间内的待收获作物的重量;
8、通过所述待收获作物的重量与所述农用收获机械的标定喂入量计算获取对应单位空间内所述农用收获机械的通行速度,以控制所述农用收获机械的负荷。
9、一种农用收获机械的负荷控制装置,包括:
10、影像设备,以获取待收获作物的图像;
11、水分测定设备,以获取待收获作物的水分值;
12、处理模块,用于执行所述的负荷控制方法中的数据处理;
13、控制模块,基于所述处理模块的数据处理结果,控制所述农用收获机械的工作信号。
14、一种农用收获机械,包括所述的负荷控制装置。
15、与现有技术相比,本发明的有益效果为:
16、(1)本发明提供了一种基于视觉技术的收获机械的负荷控制系统,通过影像设备拍摄车辆正前方一定空间内的作物图像,获取待收获作物的数量;同时基于水分值以及标定的作物平均干重,得出收割宽幅内作物的质量分布曲线,进而根据收获机械的标定喂入量计算出一个较为平滑的车速,最终控制行走泵输出驱动电流以实现对应车速进行收割作业。此外本发明的负荷控制方法还能监测视野内是否有足够的作物,当即将到达地头时,能够实现自动减速停车。
17、(2)本发明的负荷控制方法调整效果更精准平滑,通过车速曲线预计算,实现了系统预调,避免了现有控制系统的迟滞性、或调整效果不好的缺陷;本发明的负荷控制算法模型精准、简洁、可靠,同时实施所需的成本低,可以基于常规农用收货机械进行影像设备和水分测定设备即可投入生产。
技术特征:1.一种农用收获机械的负荷控制方法,其特征在于,所述负荷控制方法包括:
2.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,所述单位空间为:以所述农用收获机械正前方0~20m为长度、以所述农用收获机械的收获作业为宽度、以所述待收获作物的最高高度为高度所构成的空间。
3.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,所述待收获作物的重量的计算方法为:
4.根据权利要求3所述的农用收获机械的负荷控制方法,其特征在于,所述通行速度的计算方法为:
5.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,所述图像和所述水分值的获取频率为0.05秒/次~0.2秒/次。
6.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,以连续的n次所获取的所述图像和所述水分值作为一个检测周期,n=3~10;
7.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,所述图像通过影像设备获取;
8.根据权利要求1所述的农用收获机械的负荷控制方法,其特征在于,所述水分值通过水分测定设备获取;
9.一种农用收获机械的负荷控制装置,其特征在于,包括:
10.一种农用收获机械,其特征在于,包括如权利要求9所述的负荷控制装置。
技术总结本发明提供了一种农用收获机械的负荷控制方法、装置和应用,涉及农用机械技术领域。具体而言,实时获取单位空间内的待收获作物的图像和水分值,并同步转换为待收获作物的数量和含水率;通过所述数量和所述含水率计算获取对应单位空间内的待收获作物的重量;通过所述待收获作物的重量与所述农用收获机械的标定喂入量计算获取对应单位空间内所述农用收获机械的通行速度,以控制所述农用收获机械的负荷。本发明能够解决现行控制工艺具有较大迟滞性与突变性的缺陷,所提供的负荷控制方法调整效果更精准平滑,通过车速曲线预计算实现系统预调,控制算法模型精准、简洁、可靠,具有良好的应用前景。技术研发人员:李博伟,倪云龙,温读夫,魏莉莉,孙凌云,王吉武,姜慧敏,杨玉涛,肖大陆受保护的技术使用者:潍柴雷沃智慧农业科技股份有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290668.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表