一种巡检机器人控制方法与流程
- 国知局
- 2024-09-11 14:22:55
本发明属于巡检机器人,涉及到一种巡检机器人控制方法。
背景技术:
1、随着科技的快速发展和智能化水平的不断提升,巡检机器人在众多领域,如工业制造、能源管理、交通运输、园区安全等,正逐渐替代传统的人工巡检方式,其通过搭载各种传感器、摄像头、雷达等设备,能够实现对环境的高精度感知和数据采集,大大提高了巡检效率和准确性。然而,要让巡检机器人真正发挥其优势,一个高效、稳定的控制方法是至关重要的。
2、现有巡检机器人控制方法还存在以下几种缺陷,具体表现为:1、现有方法针对各巡检点位对应巡检路径的选择主要侧重于路径长度标准,即选择路径长度最短的巡检路径,而针对巡检路径的道路状况和道路效率未进行详细的了解,尽管选择最短路径在一定程度上能够确保特定巡检点在规定的时间内到达,但这并非绝对可行,巡检路径选择维度的单一化可能影响到巡检机器人的整体性能、任务执行的安全性和效率性。
3、2、现有方法缺乏针对巡检机器人实际行进过程中的速度调控管理能力,导致巡检机器人在实际行进过程中因各种因素耽误而无法完全保证特定巡检点在规定的时间内到达,进而影响到巡检任务的顺利高效完成。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种巡检机器人控制方法。
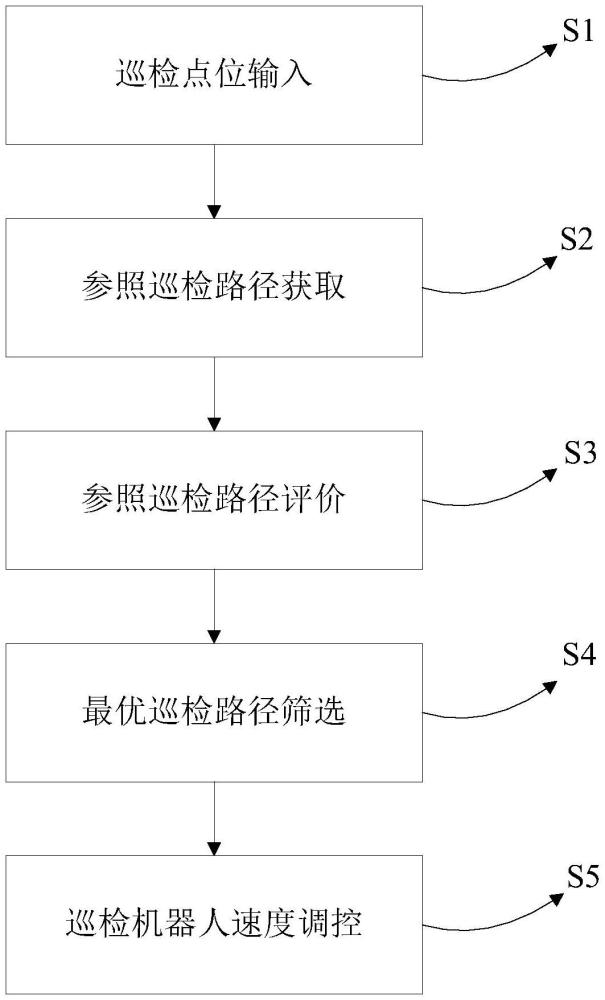
2、本发明的目的可以通过以下技术方案实现:本发明提供一种巡检机器人控制方法,包括:s1.巡检点位输入:向目标巡检机器人输入园区监测时间段内各巡检点位,按照是否存在对应限定抵达时间点将各巡检点位划分为各定时点位和各非定时点位。
3、s2.参照巡检路径获取:根据园区监测时间段内各非定时点位和各定时点位,在web云端存储的园区巡视区域地图上获取目标巡检机器人各参照巡检路径。
4、s3.参照巡检路径评价:获取目标巡检机器人的基础信息以及各参照巡检路径的道路信息,分析目标巡检机器人各参照巡检路径的道路状况评价系数和道路效率评价系数,进而计算目标巡检机器人各参照巡检路径的综合行进评价系数。
5、s4.最优巡检路径筛选:筛选综合行进评价系数最大值对应的参照巡检路径作为目标巡检机器人的最优巡检路径并进行反馈。
6、s5.巡检机器人速度调控:将各定时点位对应限定抵达时间点前设定时长的时间点记为各监测时间点,当目标巡检机器人行驶在最优巡检路径时,判断目标巡检机器人在各监测时间点是否存在速度调控需求,并分析目标巡检机器人在各存在速度调控需求的监测时间点的上调速度值,进而对目标巡检机器人进行速度调控处理。
7、优选地,所述获取目标巡检机器人各参照巡检路径,包括:各定时点位依据其对应限定抵达时间点的先后顺序生成巡检点位基础子序列,将各非定时点位随机穿插至巡检点位基础子序列内,生成目标巡检机器人各参照巡检点位序列,在园区巡视区域地图内搜索目标巡检机器人各参照巡检点位序列内各相邻点位间的最短路径,连接生成目标巡检机器人各参照巡检点位序列对应巡检路径,记为目标巡检机器人各参照巡检路径。
8、优选地,所述基础信息包括类型、型号、使用年限和历史平均避障操作记录时长。
9、所述道路信息包括各支路的宽度、长度、整体曲率值、历史各天对应监测时间段的交通流量、转弯口的最大转弯角度和最小转弯角度。
10、优选地,所述分析目标巡检机器人各参照巡检路径的道路状况评价系数,包括:根据目标巡检机器人的基本信息中类型与型号,从web云端获取目标巡检机器人的最小转弯半径rmin和前后轴轮间距d,结合目标巡检机器人各参照巡检路径的道路信息中各支路的宽度lij、转弯口的最大转弯角度θ′ij和最小转弯角度θ″ij,其中i为目标巡检机器人各参照巡检路径的编号,i=1,2,...,a,j为各支路的编号,j=1,2,...,b,计算目标巡检机器人各参照巡检路径各支路的行驶操作安全度qij,其中e为自然常数。
11、根据目标巡检机器人各参照巡检路径的道路信息中各支路的整体曲率值sij以及历史各天对应监测时间段的交通流量mijz,z为历史各天的编号,z=1,2,...,p,计算目标巡检机器人各参照巡检路径各支路的行驶操作复杂度fij,其中p为历史天数。
12、结合目标巡检机器人各参照巡检路径的道路信息中各支路的长度cij,分析目标巡检机器人各参照巡检路径的道路状况评价系数βi,其计算公式为:其中b为支路数量。
13、优选地,所述分析目标巡检机器人各参照巡检路径的道路效率评价系数,包括:依据各定位点位在参照巡检路径的位置,将参照巡检路径划分为各定时路段,进而获取目标巡检机器人各参照巡检路径的各定时路段及其巡检点位数量niw和长度c′iw,w为各定时路段的编号,w=1,2,…,h,根据各定位点位对应限定抵达时间点以及监测时间段的起始时间点,获取目标巡检机器人各参照巡检路径的各定时路段的最大限定行驶时长。
14、根据目标巡检机器人的基本信息中类型与型号,从web云端获取目标巡检机器人的设计服务寿命t和最大安全行驶速度vmax,结合目标巡检机器人的基础信息中使用年限t使和历史平均避障操作记录时长δt障,计算目标巡检机器人各参照巡检路径的各定时路段的参照行驶时长t′iw,其中δt训为web云端存储的巡检机器人单个巡检点位的参照巡检时长。
15、将目标巡检机器人各参照巡检路径的各定时路段的参照行驶时长与最大限定行驶时长进行比对,若某定时路段的参照行驶时长小于或等于其对应最大限定行驶时长,则设定该定时路段的行驶效率因子为1,反之设定为0,获取目标巡检机器人各参照巡检路径的各定时路段的行驶效率因子δiw,δiw=1或0。
16、分析目标巡检机器人各参照巡检路径的道路效率评价系数其计算公式为:
17、优选地,所述目标巡检机器人各参照巡检路径的综合行进评价系数的计算公式为:
18、优选地,所述判断目标巡检机器人在各监测时间点是否存在速度调控需求,包括:将各监测时间点与各定时点位一一对应,比对目标巡检机器人在各监测时间点的行驶位置与其对应定时点位位置,若目标巡检机器人在某监测时间点的行驶位置处于该监测时间点对应定时点位位置后,则判断目标巡检机器人在该监测时间点不存在速度调控需求,若目标巡检机器人在某监测时间点的行驶位置处于该监测时间点对应定时点位位置前,则将目标巡检机器人在该监测时间点的行驶位置与其对应定时点位间的路段记为该监测时间点的考察路段,获取该监测时间点的考察路段的长度c考,利用目标巡检机器人布设的速度传感器获取目标巡检机器人在该监测时间点的行驶速度v,进而由公式得到目标巡检机器人行驶至该监测时间点对应定时点位的基础行驶时长。
19、获取该监测时间点的考察路段的巡检点位数量,将其与巡检机器人单个巡检点位的参照巡检时长的乘积作为目标巡检机器人行驶至该监测时间点对应定时点位的基础巡检时长
20、将考察路段道路中点为目标巡检机器人的预订行驶点,获取目标巡检机器人该监测时间点的考察路段对应预订行驶路线,利用园区全方位监控设备追踪该监测时间点的考察路段上各路障的运行状态和占地覆盖范围,筛选出目标巡检机器人该监测时间点的考察路段上的各避障路障并统计避障路障数量,将避障路障数量与目标巡检机器人的历史平均避障操作记录时长的乘积作为目标巡检机器人行驶至该监测时间点对应定时点位的基础避障时长
21、进而由公式得到目标巡检机器人行驶至该监测时间点对应定时点位的有效时长,与设定时长t0进行比对,若则判断目标巡检机器人在该监测时间点存在速度调控需求,反之判断目标巡检机器人在该监测时间点不存在速度调控需求,进而获取目标巡检机器人在各监测时间点是否存在速度调控需求的判断结果。
22、优选地,上述筛选出目标巡检机器人该监测时间点的考察路段上的各避障路障,包括:筛选出占地覆盖范围处于目标巡检机器人该监测时间点的考察路段对应预订行驶路线上的各路障,记为各潜在路障,若某潜在路障满足运行状态为静止状态、运行状态为运动状态且运动方向与目标巡检机器人相对中的任一条件,则表示该潜在路障为避障路障,反之表示该潜在路障为非避障路障,进而筛选出目标巡检机器人该监测时间点的考察路段上的各避障路障。
23、优选地,所述分析目标巡检机器人在各存在速度调控需求的监测时间点的上调速度值,包括:提取目标巡检机器人在各存在速度调控需求的监测时间点的行驶速度vτ以及对应考察路段的长度cτ考,τ为各存在速度调控需求的监测时间点的编号,
24、提取目标巡检机器人行驶至各存在速度调控需求的监测时间点对应定时点位的有效时长
25、由公式得到目标巡检机器人在各存在速度调控需求的监测时间点的上调速度值δvτ上。
26、相较于现有技术,本发明的有益效果如下:(1)本发明通过在各定时点位对应限定抵达时间点的约束条件下,生成目标巡检机器人各参照巡检点位序列并搜索序列内各相邻点位间的最短路径,获取目标巡检机器人各参照巡检路径,为目标巡检机器人监测时间段内的最优巡检路径的选择提供基础。
27、(2)本发明通过结合目标巡检机器人各参照巡检路径各支路的行驶操作安全度、行驶操作复杂度和长度三个维度,综合分析目标巡检机器人各参照巡检路径的道路状况评价系数,帮助详细了解目标巡检机器人各参照巡检路径的行驶路况,不仅可以减少巡检行驶过程中的安全隐患,还可以降低巡检行驶操作的复杂性,从而提高整体巡检效率,更为目标巡检机器人选择最优巡检路径提供依据。
28、(3)本发明通过比对目标巡检机器人各参照巡检路径的各定时路段的参照行驶时长与最大限定行驶时长,分析目标巡检机器人各参照巡检路径的道路效率评价系数,有效了解目标巡检机器人能否按时抵达各定时点位位置,为目标巡检机器人的路径规划提供量化依据,从而提高整个巡检流程的可靠性和稳定性。
29、(4)本发明通过当目标巡检机器人行驶在最优巡检路径时,判断目标巡检机器人在各监测时间点是否存在速度调控需求,并分析目标巡检机器人在各存在速度调控需求的监测时间点的上调速度值,进而对目标巡检机器人进行速度调控处理,更加精准确保目标巡检机器人在实际行进过程中能够按时抵达各定时点位位置,从而使得巡检机器人的行进管理更加精细化,有助于提高巡检流程的控制力和调整能力。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290492.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表