基于柔性折叠伸缩机构的仿生海胆机器人
- 国知局
- 2024-08-01 06:59:20
本发明属于机器人,具体涉及一种基于柔性折叠伸缩机构的仿生海胆机器人。
背景技术:
1、仿生机器人是指模仿生物或某些人造的机器或装置而设计制造的机器。在当今时代,仿生机器人已在军事、工业、农业、医疗等方面得到了广泛应用。仿生机器人可以根据使用环境的不同分为三种类型:陆地上的仿生机器人、天空中的仿生机器人以及水下的仿生机器人。融合人工智能和机械工程技术的复合体机器人不仅试图模仿自然界的生物体,同时还要改进它们,使它们能够适应多种地形和环境,同时更加机械模块化且高效。此外,仿生机器人还可以嵌入一种以上生物动物的特性,再加上改善生物启发的技术来改进混合版本。
2、水下仿生机器人以其高度灵活性及逐渐智能化的特点,成为近年来机器人领域研究的热点,在军事、民用、科研等领域体现出广阔的应用前景和巨大的潜在价值。在科学技术飞速发展的现代,仿生水下机器人的动力系统和整体结构不断设计改进,未来也将在检测等工作方面获得重大成果。中国专利公开了一种基于海胆仿生的被动驱动型探测机器人,申请号:201911110102.8,该探测机器人采用多连杆以及球形骨架结构,通过控制连杆转动调整球体上刺与地的接触面,进而改变探测机器人的运动轨迹,实现加速、减速以及转向。该结构的缺点为:1、该探测机器人稳定性欠佳,受到外力作用时容易发生倾斜、摇晃或倒塌,无法经受住翻滚和非平面坠落的冲击且受碰撞后不易恢复;在水下高压环境作业时,可能导致载物平台发生变形或破坏,进而导致探测机器人失效。2、该探测机器人为锂电池供电,续航能力差,且信息获取能力弱,无法获取地理坐标、声音及图像等信息。3、载物平台与前端的球型骨架结构连接,在水下狭小空间内移动时易会出现卡顿现象,且连接处由于裸露在水中,易受海水侵蚀,当连接处的结构发生松动时,易产生漏电现象,耐用性差。4、该探测机器人的疲劳寿命较短,长期反复加载可能导致骨架结构的疲劳损伤,缩短其使用寿命。5、由于载物平台的存在,导致其仿生效果较差:其一,无法像海胆一样实现悬浮或上升;其二,隐蔽性差,易受鱼群及其他外界生物的破外。
技术实现思路
1、本发明的目的在于提供基于柔性折叠伸缩机构的仿生海胆机器人,以解决背景技术中存在的问题。
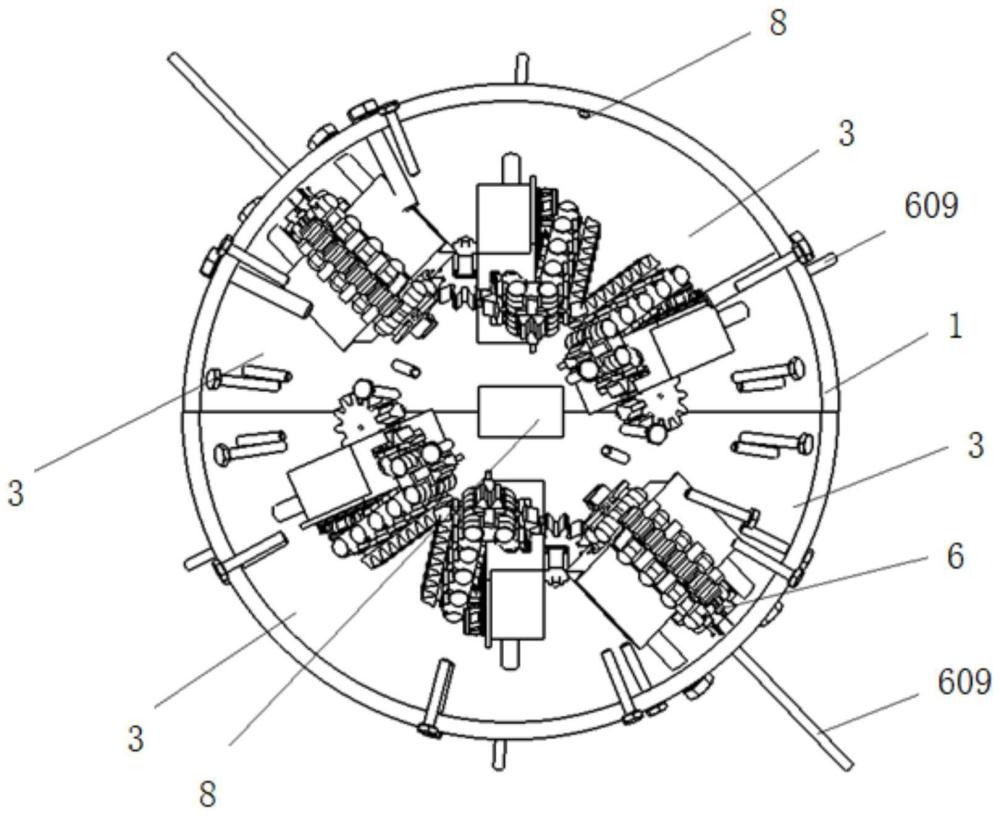
2、为实现上述目的,本发明提供如下技术方案:一种基于柔性折叠伸缩机构的仿生海胆机器人,包括球形外壳和若干个伸缩执行机构,所述若干个伸缩执行机构安装在所述球形外壳的内部,所述若干个伸缩执行机构分别包括齿轮、齿轮齿、销盖、带臂的圆柱形销、半圆头铆钉、线性滑块、线性滑轨、支架、活塞杆、电机连接板和直流步进电机;所述直流步进电机通过所述电机连接板安装在所述支架上,所述支架通过螺栓固定在所述球形外壳的内壁上,所述直流步进电机的输出轴上安装有所述齿轮,所述齿轮与所述齿轮齿啮合,销盖扣合在相邻的齿轮齿两侧并通过所述半圆头铆钉连接,齿轮齿与销盖扣合后中间带有销孔,销孔内安装有所述带臂的圆柱形销,齿轮齿、销盖、半圆头铆钉和带臂的圆柱形销组成齿轮齿单元,齿轮齿单元的前端穿过所述支架与所述活塞杆连接,齿轮齿的后端绕到支架的下部与所述线性滑块连接,所述线性滑块与所述线性滑轨滑动连接,所述践行滑轨固定在所述支架的底部,所述活塞杆穿过所述球形外壳上的圆孔与其滑动配合。
3、优选地,所述球形外壳包括内部骨架和四片球片,四片球片通过螺栓固定在内部骨架上,围城一个圆形结构,相应的球片上带有圆孔,圆孔内周围镶嵌密封圈,所述活塞杆穿过圆孔与所述密封圈滑动配合。
4、优选地,所述支架内部带有导向槽,导向槽与带臂的圆柱形销以及半圆头铆钉滑动配合。
5、优选地,所述伸缩执行机构为十二套,分别均匀安装在所述球形外壳的内部。
6、优选地,在球形外壳内部中间位置安装有惯导系统。
7、本发明的有益效果是:1、作为外壳保护球形移动机械人,本装置运动平稳且具有良好的功率和效率。此外,本装置可以向任何方向移动,任何部分都可以被视为一只脚,这使得本装置在碰撞后很容易恢复,并自动适应松软或不平坦的地形。2、机器人能经受住翻滚和非平面坠落的冲击,同时能够增强其仿生效果。3、当伸缩执行机构伸展关节时,这些关节被重建为一个坚固的刚性齿条,将关节锁定在所有轴上。然而,在压缩关节时,这些关节是解锁的,可以折叠。该系统在压缩时能够适应在最小的空间内,并具有快速而强大的伸张比来提升和推动自身。
8、1、本装置的球形外壳为移动机器人提供了坚实的保护,使其运动平稳、受外力作用时不易发生倾斜、摇晃或倒塌且具有良好的功率和效率,续航能力好,信息获取能力强,可准确获取地理坐标、声音及图像等信息。此外,本装置可以向任何方向移动,任何部分都可以被视为一只脚,这使得本装置在碰撞后很容易恢复,并自动适应松软或不平坦的地形。2、本发明整体为一球型机器人,其电子器件与电路被球型外壳保护在内部,球体暴露部位较少,其一,拥有良好的承压能力且不易发生漏电现象;其二,抵抗海水侵蚀及鱼群攻击能力较强;其三,能经受住翻滚和非平面坠落的冲击;其四能够增强其仿生效果,提高隐蔽性,不易受鱼群破坏。3、当伸缩执行机构伸展关节时,这些关节被重建为一个坚固的刚性齿条,将关节锁定在所有轴上。然而,在压缩关节时,这些关节是解锁的,可以折叠。该系统在压缩时能够适应在最小的空间内,并具有快速而强大的伸张比来提升和推动自身。4、机器人在移动作业时会翻滚均匀使用任一机构,以避免由于集中使用个别机构而导致的疲劳损伤,从而提高了整体的疲劳寿命。5、该机器人具有水下移动能力,即使处于水下的狭小空间中,该仿生海胆机器人依然能够正常工作,不会出现卡顿现象。
技术特征:1.一种基于柔性折叠伸缩机构的仿生海胆机器人,其特征在于:包括球形外壳和若干个伸缩执行机构,所述若干个伸缩执行机构安装在所述球形外壳的内部,所述若干个伸缩执行机构分别包括齿轮、齿轮齿、销盖、带臂的圆柱形销、半圆头铆钉、线性滑块、线性滑轨、支架、活塞杆、电机连接板和直流步进电机;所述直流步进电机通过所述电机连接板安装在所述支架上,所述支架通过螺栓固定在所述球形外壳的内壁上,所述直流步进电机的输出轴上安装有所述齿轮,所述齿轮与所述齿轮齿啮合,销盖扣合在相邻的齿轮齿两侧并通过所述半圆头铆钉连接,齿轮齿与销盖扣合后中间带有销孔,销孔内安装有所述带臂的圆柱形销,齿轮齿、销盖、半圆头铆钉和带臂的圆柱形销组成齿轮齿单元,齿轮齿单元的前端穿过所述支架与所述活塞杆连接,齿轮齿的后端绕到支架的下部与所述线性滑块连接,所述线性滑块与所述线性滑轨滑动连接,所述践行滑轨固定在所述支架的底部,所述活塞杆穿过所述球形外壳上的圆孔与其滑动配合。
2.根据权利要求1所述的实用于巧克力模具的扭转疲劳实验装置,其特征在于:所述球形外壳包括内部骨架和四片球片,四片球片通过螺栓固定在内部骨架上,围城一个圆形结构,相应的球片上带有圆孔,圆孔内周围镶嵌密封圈,所述活塞杆穿过圆孔与所述密封圈滑动配合。
3.根据权利要求2所述的实用于巧克力模具的扭转疲劳实验装置,其特征在于:所述支架内部带有导向槽,导向槽与带臂的圆柱形销以及半圆头铆钉滑动配合。
4.根据权利要求1所述的实用于巧克力模具的扭转疲劳实验装置,其特征在于:所述伸缩执行机构为十二套,分别均匀安装在所述球形外壳的内部。
5.根据权利要求1所述的实用于巧克力模具的扭转疲劳实验装置,其特征在于:在球形外壳内部中间位置安装有惯导系统。
技术总结本发明属于机器人技术领域,具体涉及一种基于柔性折叠伸缩机构的仿生海胆机器人,包括球形外壳和若干个伸缩执行机构,所述若干个伸缩执行机构安装在所述球形外壳的内部,所述若干个伸缩执行机构分别包括齿轮、齿轮齿、销盖、带臂的圆柱形销、半圆头铆钉、线性滑块、线性滑轨、支架、活塞杆、电机连接板和直流步进电机。作为外壳保护球形移动机械人,本装置运动平稳且具有良好的功率和效率。此外,本装置可以向任何方向移动,任何部分都可以被视为一只脚,这使得本装置在碰撞后很容易恢复,并自动适应松软或不平坦的地形。技术研发人员:王昊,赵雨瑄,冯艺显,唐栩峰,刘奎,刘振兴受保护的技术使用者:天津科技大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225729.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表