一种基于靠球的海上补给智能辅助装置
- 国知局
- 2024-08-01 06:58:18
本发明涉及到船舶补给,尤其涉及到一种基于靠球的海上补给智能辅助装置。
背景技术:
1、海上补给作业是船舶运营过程中的重要组成部分,尤其对于长期执行远洋任务的船只来说,安全、高效的物资补给尤为关键。传统的海上补给作业往往依赖于船员的经验和手动操作,这不仅劳动强度大,而且补给安全性和效率难以得到保证。特别是在恶劣天气条件下,由于船舶的剧烈摇摆,传统的补给方式极易发生危险,甚至导致人员伤亡和财产损失。随着科技的发展,各种自动化、智能化的辅助系统被广泛研究和应用,以提高海上作业的安全性和效率。在这一背景下,开发一种新型的海上补给智能辅助装置,以应对海上补给中的安全和效率挑战,成为本领域技术发展的必然趋势。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种基于靠球的海上补给智能辅助装置,适用于船舶补给作业中辅助操作,本发明能够精确控制靠球的位置和姿态,确保在各种海况下都能安全可靠地完成补给任务,减少了人为操作的不确定性和潜在风险。
2、本发明是通过以下技术手段实现上述技术目的的。
3、一种基于靠球的海上补给智能辅助装置,包括传感器模块、控制算法模块和执行机构模块;所述传感器模块通过结合船体自身gps和陀螺仪,实时监测船舶的位置、速度、姿态和靠球的受力;所述控制算法模块包括中央处理器和若干线缆,其中,所述线缆用于获取的信号和信号指令的传输,所述中央处理器基于模糊控制和神经网络实时处理传感器模块的数据,生成控制指令;所述执行机构模块包括液压组件和机械传动组件;所述机械传动组件和液压组件共同配合确保橡胶靠球的精确定位和稳定操作。
4、上述方案中,所述传感器模块包括压力传感器、图像采集器和红外测距仪;所述压力传感器设置于橡胶靠球一端的充气孔处,用于检测橡胶靠球的内部压力变化;所述图像采集器和红外测距仪共设两组,对称布置于移动平台两端,与同轴卷扬机下方基座固定连接。
5、上述方案中,所述中央处理器与移动平台固定连接,布置于液压油箱一侧;中央处理器通过线缆与传感器模块连接,获取传感器采集的各参数信息;同样,中央处理器通过线缆与执行机构模块连接,传输运动指令,将橡胶靠球递送到预定位置并实时调整。
6、上述方案中,所述液压组件包括液压泵、液压缸、阀门、管道和液压油箱;其中,液压泵与液压油箱连接,阀门设置于液压泵两端,并通过管道连接两端的液压缸;液压缸设置于吊机的吊臂与支柱之间,用于调整吊臂仰角;此外吊臂内部也与液压系统连接,用于吊臂的伸缩。
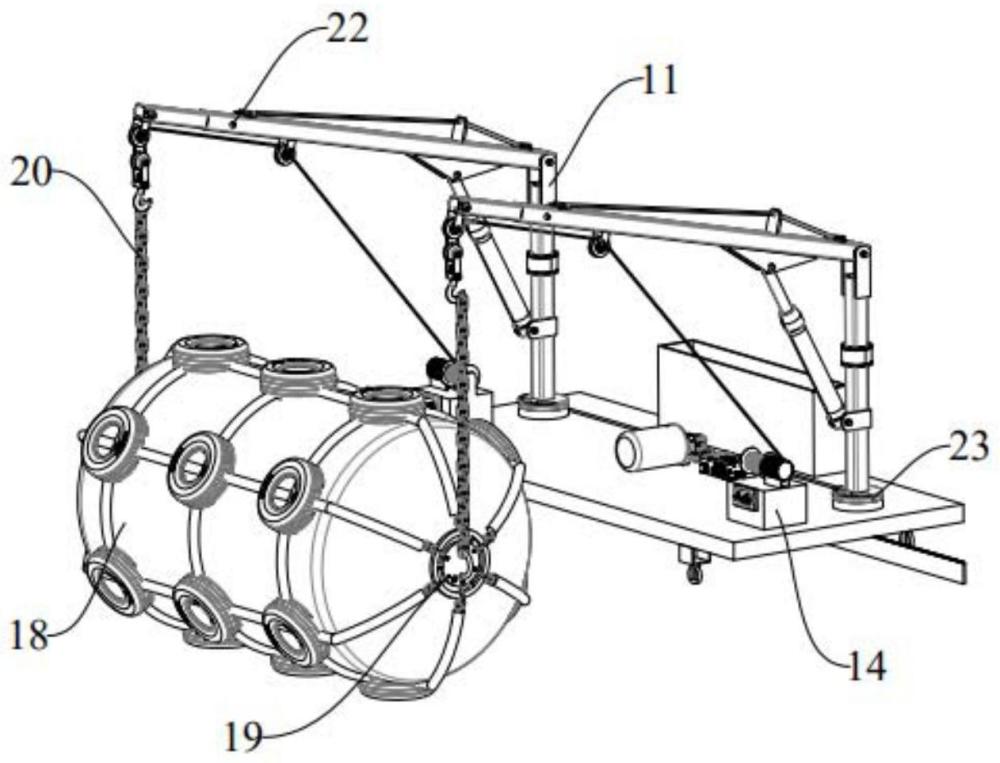
7、上述方案中,所述机械传动组包括吊机、滑轮组、钢绳、同轴卷扬机、齿条和大功率电机;所述吊机共设两组,分别堆成布置于移动平台的两端;所述滑轮组共两组,每组各两个滑轮,分别固定连接在吊臂下方;其中,定滑轮a位于吊臂前端部位置,定滑轮b位于吊臂中部位置,吊机支柱底部设有圆形转台,圆形转台与移动凭条转动连接;同轴卷扬机设置两组,在移动平台上呈对称布置,用于吊起靠球的钢绳绕过定滑轮a、定滑轮b与同轴卷扬机相连接;此外,大功率电机固定于平台底部,与固定在船体舷侧的齿条啮合,用于控制整个装置在船体舷侧的横向位置。
8、上述方案中,所述传感器模块、控制算法模块和执行机构模块共同集成于移动平台上,移动平台下方固定连接有四个万向轮,当移动平台移动到位于船宽方向的预定位置后,万向轮锁定方向,配合齿条相对船首尾方向的移动。
9、上述方案中,所述移动平台一侧设置有配重箱,所述配重箱用于放置配重块。
10、有益效果:
11、1.本发明通过集成先进的传感器模块、控制算法模块和执行机构模块,实现了对补给过程的实时监控和智能控制;传感器模块利用压力传感器、图像采集器和红外测距仪等多种传感设备,结合船体自身的gps和陀螺仪,实时监测船舶和靠球的状态;控制算法模块采用模糊控制、神经网络等先进控制算法,实时处理传感数据并生成精确的控制指令;执行机构模块则由液压和机械传动组件构成,共同配合确保靠球的精确定位和稳定操作。这样的设计大幅提高了海上补给作业的自动化程度,显著降低了操作风险,提升了作业效率。
12、2.本发明中的控制算法模块采用模糊控制和神经网络等智能化控制算法,使得中央处理器能够实时处理传感器模块的数据,并生成精确的控制指令。执行机构模块中的液压和机械传动组件响应这些指令,确保靠球可以精确地被定位和稳定地操作。此外,整个系统的人机交互设计允许操作人员在必要时进行干预,这提高了操作的灵活性,并确保了补给作业在自动化和半自动化之间可以灵活切换,适应不同的操作需求。
13、3.本发明通过集成先进的传感器模块,包括压力传感器、图像采集器和红外测距仪,结合船只的gps和陀螺仪系统,能够实时监测补给靠球与船舶的相对位置、速度、姿态以及靠球的受力状态,从而显著提高海上补给操作的安全性。本发明能够精确控制靠球的位置和姿态,确保在各种海况下都能安全可靠地完成补给任务,减少了人为操作的不确定性和潜在风险。
技术特征:1.一种基于靠球的海上补给智能辅助装置,其特征在于,包括传感器模块、控制算法模块和执行机构模块;所述传感器模块通过结合船体自身gps和陀螺仪,实时监测船舶的位置、速度、姿态和靠球(18)的受力;所述控制算法模块包括中央处理器(5)和若干线缆,其中,所述线缆用于获取的信号和信号指令的传输,所述中央处理器(5)基于模糊控制和神经网络实时处理传感器模块的数据,生成控制指令;所述执行机构模块包括液压组件和机械传动组件;所述机械传动组件和液压组件共同配合确保橡胶靠球(18)的精确定位和稳定操作。
2.根据权利要求1所述的基于靠球的海上补给智能辅助装置,其特征在于,所述传感器模块包括压力传感器(4)、图像采集器(3)和红外测距仪(2);所述压力传感器(4)设置于橡胶靠球(18)一端的充气孔处,用于检测橡胶靠球(18)的内部压力变化;所述图像采集器(3)和红外测距仪(2)共设两组,对称布置于移动平台(1)两端,与同轴卷扬机(14)下方基座固定连接。
3.根据权利要求1所述的基于靠球的海上补给智能辅助装置,其特征在于,所述中央处理器(5)与移动平台(1)固定连接,布置于液压油箱(10)一侧;中央处理器(5)通过线缆与传感器模块连接,获取传感器采集的各参数信息;同样,中央处理器(5)通过线缆与执行机构模块连接,传输运动指令,将橡胶靠球(18)递送到预定位置并实时调整。
4.根据权利要求1所述的基于靠球的海上补给智能辅助装置,其特征在于,所述液压组件包括液压泵(6)、液压缸(7)、阀门(8)、管道(9)和液压油箱(10);其中,液压泵(6)与液压油箱(10)连接,阀门(8)设置于液压泵(6)两端,并通过管道(9)连接两端的液压缸(7);液压缸(7)设置于吊机(11)的吊臂(22)与支柱之间,用于调整吊臂(22)仰角;此外吊臂(22)内部也与液压系统连接,用于吊臂(22)的伸缩。
5.根据权利要求4所述的基于靠球的海上补给智能辅助装置,其特征在于,所述机械传动组包括吊机(11)、滑轮组、钢绳(13)、同轴卷扬机(14)、齿条(15)和大功率电机(16);所述吊机(11)共设两组,分别堆成布置于移动平台(1)的两端;所述滑轮组共两组,每组各两个滑轮,分别固定连接在吊臂(22)下方;其中,定滑轮a(12a)位于吊臂(22)前端部位置,定滑轮b(12b)位于吊臂(22)中部位置,吊机(11)支柱底部设有圆形转台(23),圆形转台(23)与移动凭条转动连接;同轴卷扬机(14)设置两组,在移动平台(1)上呈对称布置,用于吊起靠球(18)的钢绳(13)绕过定滑轮a(12a)、定滑轮b(12b)与同轴卷扬机(14)相连接;此外,大功率电机(16)固定于移动平台(1)底部,大功率电机(16)输出端的齿轮与固定在船体舷侧的齿条(15)啮合,用于控制移动平台(1)在船体舷侧的移动。
6.根据权利要求1-5任一项所述的基于靠球的海上补给智能辅助装置,其特征在于,所述传感器模块、控制算法模块和执行机构模块共同集成于移动平台(1)上,移动平台(1)下方固定连接有四个万向轮(17),当移动平台(1)移动到位于船宽方向的预定位置后,万向轮(17)锁定方向,配合齿条(15)相对船首尾方向的移动。
7.根据权利要求1所述的基于靠球的海上补给智能辅助装置,其特征在于,所述移动平台(1)一侧设置有配重箱(21),所述配重箱(21)用于放置配重块。
技术总结本发明公开了一种基于靠球的海上补给智能辅助装置,涉及船舶补给领域,包括传感器模块、控制算法模块和执行机构模块;传感器模块通过结合船体自身GPS和陀螺仪,实时监测船舶的位置、速度、姿态和靠球的受力;控制算法模块包括中央处理器和若干线缆,线缆用于获取的信号和信号指令的传输,中央处理器基于模糊控制和神经网络实时处理传感器模块的数据,生成控制指令;执行机构模块包括液压组件和机械传动组件;机械传动组件和液压组件共同配合确保橡胶靠球的精确定位和稳定操作。本发明能够精确控制和调整靠球的位置和姿态,以确保更高级别海况下补给任务安全可靠地完成,扩大了补给作业的气象环境条件边界,减少了人为操作的不确定性和潜在风险。技术研发人员:王正耀,刘昆,孟庆澳,俞同强,路越,郭书青受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表