具有串联机器人装置的船舶及自平衡方法与流程
- 国知局
- 2024-08-01 06:58:17
本发明涉及船舶,具体地,涉及一种具有串联机器人装置的船舶及自平衡方法。
背景技术:
1、船舶在水面上会因为风浪等外界因素出现向某一方向上的倾斜,其原因在于:如图1所示,船舶在静水中处于正浮状态,此时船舶的重心g与浮心b在同一直线上,两者大小相等且方向相反,因此船舶处于稳定状态。如图2所示,由于风浪的作用,当船舶的一侧受到海浪波动,如左侧水位上升,吃水面积增大,浮力增大,增加的浮力f1或者由于侧面受风力f2的推动,使船舶的浮心b发生偏移至b1,则船体向右侧倾斜。同时,浮力产生的反向力矩m使船体向回正方向运动,船体产生左右晃动,前后方向同理。对于船舶内的乘客的乘坐舒适性带来较大的负面影响,严重时甚至影响乘客、所载设备以及货物的安全。
2、为了解决这一问题,常见的做法是船体舭部上设置凸起的舭龙骨、鳍片,在上下移动时产生湍流,从而抑制船舶的横摇,但是在越大的船舶上减摇的效果越有限。而专利文献cn219295647u公开了一种现有船舶减摇的常见技术,即通过对船舱内各个储水舱内的水进行抽放、驱动,从而改变船舶的重心位置,从而克服因波浪带来的船身摇摆。然而这种技术的缺陷在于,对储水舱内的水进行抽放、驱动的效率缓慢,在波浪的频率较大时难以应对。
3、随着科学技术的不断发展,机器人在工业生产、生活、科学研究等方面的应用越来越广泛。在机器人学领域,机器人一般可以分为串联机器人和并联机器人两类,串联机器人是一种典型的工业或实验室机器人,其特点是各个关节和执行器(如机械臂)是按照一定的顺序依次连接的,其移动范围较大,灵活性较好,较现有平衡方式更加精准,高效。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种具有串联机器人装置的船舶及自平衡方法。
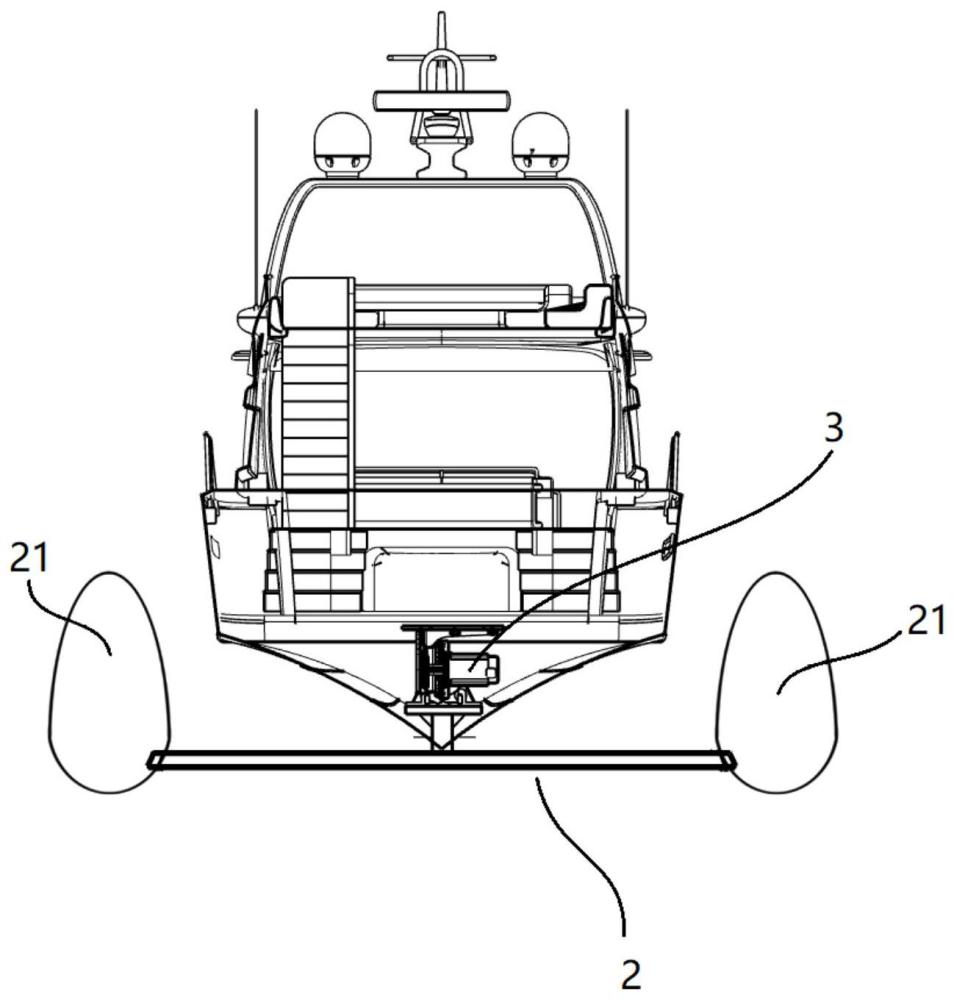
2、为解决技术问题,本技术提供了一种具有串联机器人装置的船舶,包括:主船、辅船和串联机器人装置;所述主船具有适于浸没在水面以下的船底;所述辅船包括多个子船体,所述子船体之间通过连接件连接,以组成基准平台,所述子船体位于所述主船的两侧,其中所述辅船提供给主船的支持力小于所述主船自身的重力,即所述主船部分位于水面以下;所述串联机器人装置包括:第一姿态调节电机、第二姿态调节电机、控制器、姿态传感器、第一角位移传感器和第二角位移传感器;其中,所述姿态传感器设置于所述主船上,用于采集所述主船的姿态,所述第一角位移传感器位于所述第一姿态调节电机上,用于采集第一姿态调节电机的角位移,所述第二角位移传感器位于所述第二姿态调节电机上,用于采集第二姿态调节电机的角位移;所述第一姿态调节电机固定连接在所述辅船上,所述第一姿态调节电机的输出端驱动连接所述第二姿态调节电机,所述第二姿态调节电机的输出端驱动连接所述主船,以所述辅船为基准平台,对所述主船进行运动补偿和姿态矫正;所述控制器配置为根据所述主船的姿态、第一姿态调节电机的角位移和第二姿态调节电机的角位移计算所述主船平衡状态时的期望状态,建立具有串联机器人装置的船舶自平衡动力学模型,所述船舶自平衡动力学模型包括海浪对船舶的作用力,基于所述船舶自平衡动力学模型确定满足所述期望状态的第一姿态调节电机和第二姿态调节电机的控制量,根据所述控制量控制所述第一姿态调节电机和第二姿态调节电机运动。
3、可选地,所述串联机器人装置还包括:上平台和下平台,所述第一姿态调节电机和第二姿态调节电机位于所述上平台和下平台之间,所述第一姿态调节电机固定在所述下平台上,所述下平台与所述连接件固定连接,所述上平台与所述主船固定连接。
4、可选地,所述第一姿态调节电机与所述第二姿态调节电机在同一平面上,且输出端所在轴线相互垂直。
5、可选地,所述连接件为可折叠或可伸缩结构,用于调整所述子船体的位置。
6、可选地,所述辅船被设计为部分浮于水面以上,且所述多个子船体位于所述主船的船舷两侧;或者所述辅船被设计为全部位于水面以下,且所述子船体位于所述主船的下方两侧。
7、可选地,所述主船和/或所述辅船上设置有推进装置。
8、可选地,所述辅船提供的浮力大于等于所述辅船自身的重力。
9、可选地,根据所述主船的姿态、第一姿态调节电机的角位移和第二姿态调节电机的角位移计算所述主船平衡状态时的期望状态包括:根据第一姿态调节电机的角位移和第二姿态调节电机的角位移计算第一姿态调节电机和第二姿态调节电机的输出力矩;将所述第一姿态调节电机和第二姿态调节电机的输出力矩输入双轴解耦的非线性动力学模型计算整船的横摇角和纵摇角;根据所述主船的姿态和所述整船的横摇角和纵摇角计算辅船姿态;根据所述辅船姿态确定所述主船平衡状态时的期望状态。
10、可选地,所述双轴解耦的非线性动力学模型可表示为:
11、
12、其中:jα(α)、jβ(β)分别为第一姿态调节电机和第二姿态调节电机的转动惯量,分别为第一姿态调节电机和第二姿态调节电机的科氏力与离心力矩阵,gα(α)、gβ(β)为重力项,tα、tβ表示为第一姿态调节电机和第二姿态调节电机的输出力矩,γd表示所述海浪对船舶的作用力。
13、可选地,所述船舶自平衡动力学模型可表示为:
14、
15、其中,q=[q1,q2],分别表示第一姿态调节电机和第二姿态调节电机的角位移,mq(q)为所述船舶的惯量矩阵,为所述船舶的科氏力与离心力矩阵,gq(q)为重力项,fq=[fq1,fq2],表示第一姿态调节电机和第二姿态调节电机的驱动力,jd为所述第一姿态调节电机和第二姿态调节电机映射到所述主船的速度雅克比矩阵,γd表示所述海浪对船舶的作用力。
16、可选地,基于船舶自平衡动力学模型确定满足所述期望状态的第一姿态调节电机和第二姿态调节电机的控制量包括:
17、建立船舶自平衡主动稳定系统的非线性动力学状态空间方程;
18、构建船舶姿态稳定控制代价函数,所述船舶姿态稳定控制代价函数包括船舶期望状态和船舶预测将来时刻实际状态之差,以及第一姿态调节电机和第二姿态调节电机的预测将来时刻控制量和上一时刻实际控制量之差;构建约束条件,所述约束条件包括使船舶姿态稳定控制代价函数最小、第一姿态调节电机和第二姿态调节电机的位移限制、速度限制和驱动力限制;
19、基于所述约束条件在每个采样周期内对所述非线性动力学状态空间方程进行求解,得到控制时域内的最优控制序列;
20、将所述最优控制序列的第一个元素作为所述控制量。
21、为解决技术问题,本技术提供了一种具有串联机器人装置的船舶的自平衡方法,包括以下步骤:采集主船的姿态、第一姿态调节电机的角位移和第二姿态调节电机的角位移;根据所述主船的姿态第一姿态调节电机的角位移和第二姿态调节电机的角位移计算所述主船平衡状态时的期望状态;建立具有串联机器人装置的船舶自平衡动力学模型,所述船舶自平衡动力学模型包括海浪对船舶的作用力;基于所述船舶自平衡动力学模型确定满足所述期望状态的第一姿态调节电机和第二姿态调节电机的控制量;根据所述控制量控制所述第一姿态调节电机和第二姿态调节电机运动,以所述辅船为基准平台,对所述主船进行运动补偿和姿态矫正。可选地,根据所述主船的姿态、第一姿态调节电机的角位移和第二姿态调节电机的角位移计算所述主船平衡状态时的期望状态包括:根据第一姿态调节电机的角位移和第二姿态调节电机的角位移计算第一姿态调节电机和第二姿态调节电机的输出力矩;将所述第一姿态调节电机和第二姿态调节电机的输出力矩输入双轴解耦的非线性动力学模型计算整船的横摇角和纵摇角;根据所述主船的姿态和所述整船的横摇角和纵摇角计算辅船姿态;根据所述辅船姿态确定所述主船平衡状态时的期望状态。
22、可选地,所述双轴解耦的非线性动力学模型可表示为:
23、
24、其中:jα(α)、jβ(β)分别为第一姿态调节电机和第二姿态调节电机的转动惯量,分别为第一姿态调节电机和第二姿态调节电机的科氏力与离心力矩阵,gα(α)、gβ(β)为重力项,tα、tβ表示为第一姿态调节电机和第二姿态调节电机的输出力矩,γd表示所述海浪对船舶的作用力。
25、可选地,基于船舶自平衡动力学模型确定满足所述期望状态的第一姿态调节电机和第二姿态调节电机的控制量包括:建立船舶自平衡主动稳定系统的非线性动力学状态空间方程;构建船舶姿态稳定控制代价函数,所述船舶姿态稳定控制代价函数包括船舶期望状态和船舶预测将来时刻实际状态之差,以及第一姿态调节电机和第二姿态调节电机的预测将来时刻控制量和上一时刻实际控制量之差;构建约束条件,所述约束条件包括使船舶姿态稳定控制代价函数最小、第一姿态调节电机和第二姿态调节电机的位移限制、速度限制和驱动力限制;基于所述约束条件在每个采样周期内对所述非线性动力学状态空间方程进行求解,得到控制时域内的最优控制序列;将所述最优控制序列的第一个元素作为所述控制量。
26、可选地,所述船舶自平衡动力学模型可表示为:
27、
28、其中,q=[q1,q2],分别表示第一姿态调节电机和第二姿态调节电机的角位移,mq(q)为所述船舶的惯量矩阵,为所述船舶的科氏力与离心力矩阵,gq(q)为重力项,fq=[fq1,fq2],表示第一姿态调节电机和第二姿态调节电机的驱动力,jd为所述第一姿态调节电机和第二姿态调节电机映射到所述主船的速度雅克比矩阵,γd表示所述海浪对船舶的作用力。
29、可选地,所述海浪对船舶的作用力为一阶波浪力,所述一阶波浪力包括多组不同遭遇频率及相位的非线性基础波浪力。
30、可选地,所述一阶波浪力表达式为:
31、
32、其中i代表第i个方向,aw为波幅,ωe为遭遇频率,αi=arg[fi(ωe)],χ为浪向角,fi(ωe)为船舶处于顶浪时(χ=180°)的波浪力幅值响应因子,即:
33、
34、其中为波高。
35、与现有技术相比,本发明具有如下的有益效果:
36、1、本技术通过串联机器人装置的各个电机在主船与辅船之间施力,借助辅船从俯仰、横滚调整主船的姿态,从而实现主船的姿态调整,改变整船的重心位置,实现了主船的平稳。较现有技术的调整方式更加快速、高效,可以适用于各类小型、中型船舶及特种大型船舶。
37、2、本技术考虑了非线性因素,建立串联机器人装置、船舶的非线性动力学状态方程,在控制过程中考虑了第一姿态调节电机和第二姿态调节电机的物理约束,能够在参数变化或外部扰动的情况下保持较好的姿态跟踪精度和实时性,具有较好的稳定性和鲁棒性,可以有效提升乘坐舒适感。
38、3、本技术利用串联机器人装置的运动学模型避免了辅船上安装姿态传感器,有效提升了稳定性和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225648.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表