应急探测救援用水下机器人的制作方法
- 国知局
- 2024-08-01 06:58:13
本发明涉及水下探测,具体为一种应急探测救援用水下机器人。
背景技术:
1、水下救援机器人是一种用于潜入水底观察水底环境、辅助工作人员探测搜救的设备,水下救援机器人可以通过搭载多种搜寻、探测传感器,在水中自由移动时由摄像头采集水底图像,并经线路将数据传输至终端,方便搜救人员在水上观察探测情况,水下救援机器人可避免受水域环境复杂、水流湍急以及潜水人员体力限制的影响,探测救援工作高效,目前在人员搜救、海上救援打捞、水下考古挖掘以及海上建设等方面有着广泛的应用。
2、现有的水下救援机器人在进行水下救援时,是依靠工作人员远程操控,控制推进器高速运转在水中移动,但是由于水底环境复杂,地质崎岖,在搜救过程中一旦方向控制不当就容易发生机体碰撞,造成机器人机体的损坏,而目前的水下救援机器人只能通过控制推进器关闭减少动力来达到降速的效果,难以根据行驶环境进行及时刹停,不利于水下救援机器人的安全行驶;另外由于机器人在水底工作,尤其是较深的海底,水压较强,机器人在长期使用后密封损耗容易发生渗漏,而现有的机器人缺乏漏水监测功能,操作者难以及时发现机器人漏水,容易发生机器人内部元件不可逆的损坏。
技术实现思路
1、本发明的目的在于提供应急探测救援用水下机器人,以解决上述背景技术中提出的问题。
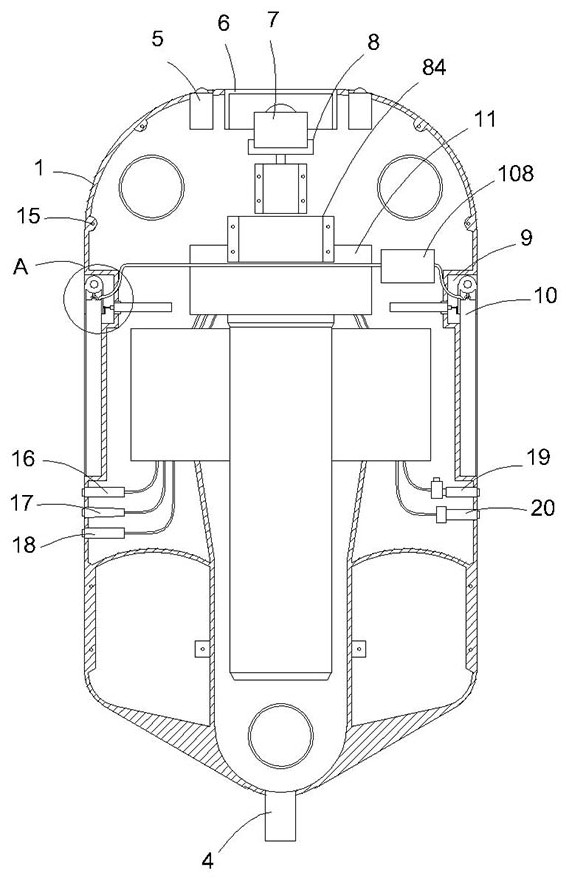
2、为实现上述目的,本发明提供如下技术方案:应急探测救援用水下机器人,包括外壳、安装于外壳后侧的前进螺旋推进器、安装于外壳前侧以及后侧中部的升降螺旋推进器、连接于外壳后侧壁中心处的电路连接接头,所述外壳前侧壁中部安装有透明罩,所述外壳前侧壁处于透明罩的两侧均安装有补光灯,所述透明罩内部安装有摄像头,所述摄像头后侧安装有晃动补偿机构,所述外壳的左右两侧均开设有凹槽,所述凹槽内部安装有刹停机构;
3、所述刹停机构包括轴套,所述轴套中部贯穿设置有销轴,所述轴套后侧壁设置有活动环,所述活动环后侧连接有活动板,所述轴套的左右两侧壁均连接有限位板,所述活动板数量为四个,且呈上下排布,相邻所述活动板之间连接有伸缩气囊,所述伸缩气囊前侧连接有通气管,所述通气管远离伸缩气囊的一端连接有气泵,所述限位板外侧壁设置有连接环,所述连接环上连接有电动推杆。
4、优选的,所述限位板数量为两个,对称分布于轴套的左右两侧,所述限位板与轴套一体连接,所述轴套与限位板经销轴与外壳转动连接,所述活动板宽度尺寸两个限位板之间间距相适配,所述活动板前侧插入两个限位板之间,且活动板经活动环与轴套形成转动连接。
5、优选的,相邻所述活动板之间通过伸缩气囊连接,所述伸缩气囊内部中空,所述伸缩气囊经通气管与气泵连通。
6、优选的,所述电动推杆贯穿外壳侧壁,所述电动推杆的伸缩端经连接环与限位板转动连接。
7、优选的,所述外壳内部设置有微处理器,所述外壳一侧内部处于凹槽的后方安装有温度传感器,所述温度传感器后侧安装有盐度计,所述盐度计后侧安装有浊度传感器,所述外壳另一侧内部处于凹槽的后方安装有压力传感器,所述压力传感器后侧安装有溶解氧传感器,所述温度传感器、盐度计、浊度传感器、压力传感器以及溶解氧传感器均通过电路与微处理器输入端电性连接。
8、优选的,所述晃动补偿机构包括固定座,所述固定座后侧连接有驱动电机,所述驱动电机底部连接有电机支架,所述驱动电机后侧安装有倾角传感器,所述倾角传感器通过电路与微处理器输入端电性连接。
9、优选的,所述固定座后侧壁中心处与驱动电机轴端连接,所述驱动电机经电机支架安装在外壳内壁,所述固定座、摄像头均通过驱动电机与外壳形成转动连接。
10、优选的,所述外壳包括上壳体与下壳体,所述上壳体与下壳体之间设置有密封圈,所述上壳体与下壳体之间贯穿设置有螺丝,所述上壳体与下壳体经螺丝连接。
11、优选的,所述下壳体内壁连接有弧形缘,所述弧形缘内侧连接有湿度传感器,所述弧形缘截面呈半圆环状,所述弧形缘与下壳体一体连接,所述湿度传感器的检测端插入弧形缘内部。
12、与现有技术相比,本发明的有益效果是:
13、1、本应急探测救援用水下机器人,通过设置刹停机构,当机器人行驶过程中遇到障碍需要刹停时,操作者输入刹停控制指令,前进螺旋推进器关闭,机器人行驶降速,同时电动推杆伸长经连接环推动限位板,使限位板带动轴套绕销轴转动,限位板拨动多个活动板从凹槽内移动,同时气泵经通气管向伸缩气囊中充气,伸缩气囊充气膨胀,推动上下两侧的两个活动板相互远离,使活动板经活动环相对轴套在垂直方向上转动形成扇形,防鱼类腹鳍设计,由扇形的伸缩气囊为机器人提供行驶阻力,使机器人在降速后完成刹停,避免机器人在水下发生碰撞造成损上,增加机器人水下搜救的安全性。
14、2、本应急探测救援用水下机器人,通过设置弧形缘与湿度传感器,上壳体与下壳体经螺丝连接后,上壳体与下壳体之间的缝隙与弧形缘内腔连通,在密封圈长久使用发生损耗后,受水底压力影响水流从上壳体与下壳体之间缝隙向机器人内部渗漏,水流穿过缝隙流入弧形缘内,在弧形缘内逐渐积攒,直至水流在弧形缘内流动接触湿度传感器的探头,湿度传感器检测到弧形缘内湿度过大,并传输湿度数据至微处理器,微处理对数据处理后经线缆传输报警信号至操作者的控制终端,及时提醒操作者机器人发生渗水现象,实现机器人的渗水监测以及报警提醒功能。
15、3、本应急探测救援用水下机器人,通过设置晃动补偿机构,在机器人水下行驶过程中,受水流流速影响,机器人容易发生左右晃动,机器人晃动就会带动内部摄像头晃动,影响图像观看清晰度以及舒适度,通过倾角传感器检测机器人外壳晃动的角度及方向,并将检测数据传输至微处理器,微处理器控制驱动电机启动,由驱动电机带动固定座向反方向转动相同的角度,固定座带动摄像头转动使其保持水平状态,以补偿外壳晃动对摄像头造成的影响,确保摄像头稳定采集水下图像。
16、4、本应急探测救援用水下机器人,通过设置温度传感器、压力传感器、盐度计、浊度传感器与溶解氧传感器,机器人在水下时,温度传感器、压力传感器、盐度计、浊度传感器与溶解氧传感器在外壳两侧接触水底水流,通过温度传感器检测水底的实时水温,压力传感器检测水底实时水压,盐度计检测水底盐度,浊度传感器检测水底浊度,溶解氧传感器检测水底的溶解氧含量,以实时监测水下的物理以及化学条件。
技术特征:1.一种应急探测救援用水下机器人,包括外壳(1)、安装于外壳(1)后侧的前进螺旋推进器(2)、安装于外壳(1)前侧以及后侧中部的升降螺旋推进器(3)、连接于外壳(1)后侧壁中心处的电路连接接头(4),其特征在于:所述外壳(1)前侧壁中部安装有透明罩(6),所述外壳(1)前侧壁处于透明罩(6)的两侧均安装有补光灯(5),所述透明罩(6)内部安装有摄像头(7),所述摄像头(7)后侧安装有晃动补偿机构(8),所述外壳(1)的左右两侧均开设有凹槽(9),所述凹槽(9)内部安装有刹停机构(10);
2.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:所述限位板(105)数量为两个,对称分布于轴套(101)的左右两侧,所述限位板(105)与轴套(101)一体连接,所述轴套(101)与限位板(105)经销轴(102)与外壳(1)转动连接,所述活动板(104)宽度尺寸两个限位板(105)之间间距相适配,所述活动板(104)前侧插入两个限位板(105)之间,且活动板(104)经活动环(103)与轴套(101)形成转动连接。
3.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:相邻所述活动板(104)之间通过伸缩气囊(106)连接,所述伸缩气囊(106)内部中空,所述伸缩气囊(106)经通气管(107)与气泵(108)连通。
4.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:所述电动推杆(1010)贯穿外壳(1)侧壁,所述电动推杆(1010)的伸缩端经连接环(109)与限位板(105)转动连接。
5.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:所述外壳(1)内部设置有微处理器(11),所述外壳(1)一侧内部处于凹槽(9)的后方安装有温度传感器(16),所述温度传感器(16)后侧安装有盐度计(17),所述盐度计(17)后侧安装有浊度传感器(18),所述外壳(1)另一侧内部处于凹槽(9)的后方安装有压力传感器(19),所述压力传感器(19)后侧安装有溶解氧传感器(20),所述温度传感器(16)、盐度计(17)、浊度传感器(18)、压力传感器(19)以及溶解氧传感器(20)均通过电路与微处理器(11)输入端电性连接。
6.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:所述晃动补偿机构(8)包括固定座(81),所述固定座(81)后侧连接有驱动电机(82),所述驱动电机(82)底部连接有电机支架(83),所述驱动电机(82)后侧安装有倾角传感器(84),所述倾角传感器(84)通过电路与微处理器(11)输入端电性连接。
7.根据权利要求6所述的应急探测救援用水下机器人,其特征在于:所述固定座(81)后侧壁中心处与驱动电机(82)轴端连接,所述驱动电机(82)经电机支架(83)安装在外壳(1)内壁,所述固定座(81)、摄像头(7)均通过驱动电机(82)与外壳(1)形成转动连接。
8.根据权利要求1所述的应急探测救援用水下机器人,其特征在于:所述外壳(1)包括上壳体(12)与下壳体(13),所述上壳体(12)与下壳体(13)之间设置有密封圈(14),所述上壳体(12)与下壳体(13)之间贯穿设置有螺丝(15),所述上壳体(12)与下壳体(13)经螺丝(15)连接。
9.根据权利要求8所述的应急探测救援用水下机器人,其特征在于:所述下壳体(13)内壁连接有弧形缘(131),所述弧形缘(131)内侧连接有湿度传感器(132),所述弧形缘(131)截面呈半圆环状,所述弧形缘(131)与下壳体(13)一体连接,所述湿度传感器(132)的检测端插入弧形缘(131)内部。
技术总结本发明公开了应急探测救援用水下机器人,包括外壳、安装于外壳后侧的前进螺旋推进器、安装于外壳前侧以及后侧中部的升降螺旋推进器、连接于外壳后侧壁中心处的电路连接接头,所述外壳前侧壁中部安装有透明罩,所述外壳前侧壁处于透明罩的两侧均安装有补光灯,所述透明罩内部安装有摄像头,所述摄像头后侧安装有晃动补偿机构。本发明通过设置通过设置刹停机构,可以达到防鱼类腹鳍设计,由扇形的伸缩气囊为机器人提供行驶阻力,使机器人在降速后完成刹停,避免机器人在水下发生碰撞造成损上,增加机器人水下搜救的安全性;通过设置弧形缘与湿度传感器,可以达到及时提醒操作者机器人发生渗水现象,实现机器人的渗水监测以及提醒功能。技术研发人员:樊卫治受保护的技术使用者:河南省金蝉子软件科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225638.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表