一种水下机器人支撑结构的制作方法
- 国知局
- 2024-08-01 06:58:07
本技术涉及水下机器人,具体为一种水下机器人支撑结构。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发水资源的重要工具。
2、目前,水下机器人的推进器通常会安装在机器人底部的支撑板上,当水下机器人在水下作业时,由于水底水藻等杂物较多,会出现水藻等杂物缠绕在推进器上,导致推进器受损,影响水下机器人的水下作业效率。
技术实现思路
1、本实用新型的目的在于提供一种水下机器人支撑结构,以解决上述背景技术中提出的由于水底水藻等杂物较多,会出现水草等造物缠绕在推进器上,导致推进器受损,影响水下机器人的水下作业效率的问题。
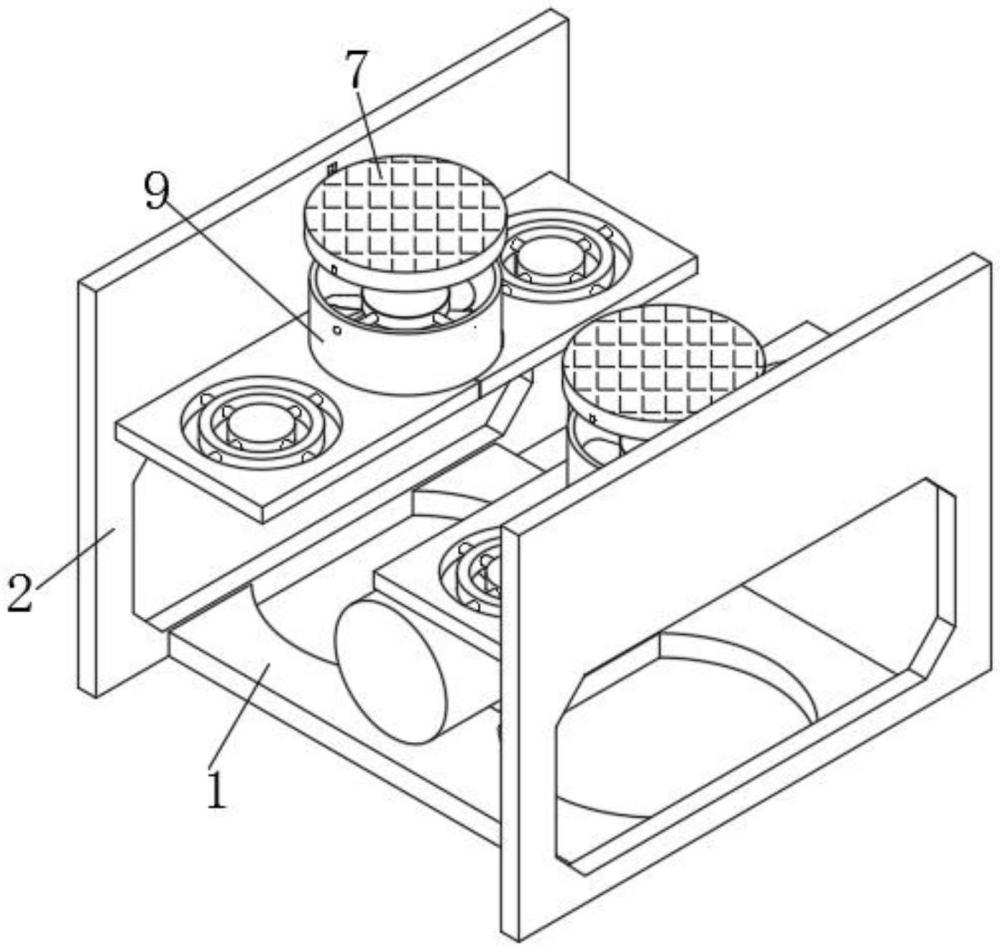
2、为实现上述目的,本实用新型提供如下技术方案,一种水下机器人支撑结构,包括支撑底板和推进器,所述支撑底板的外表面固定连接有支撑侧板,所述支撑侧板的外表面底端通过螺栓固定连接有安装板,所述支撑侧板的外表面开设有滑槽,所述滑槽的内侧滑动连接有滑块,所述滑块的外表面固定连接有防护网,所述防护网的外表面开设有连接槽,所述推进器的外表面开设有调节槽,所述调节槽的内侧固定连接有弹簧,所述弹簧的外表面固定连接有连接球。
3、优选的,所述支撑侧板的外表面靠近安装板的上方固定连接有固定柱,所述在安装板的内侧固定连接有插杆,所述推进器外表面远离调节槽的正下方开设有插槽二,所述推进器远离插槽二的外表面开设有插槽一。
4、优选的,所述安装板呈板状形状,所述安装板呈四组,所述安装板的一侧外表面开设有半圆形凹槽,所述推进器安装在两组安装板之间,所述推进器呈两组,其作用是将推进器通过卡合的安装到两组安装板之间,方便后续对推进器进行拆卸或替换。
5、优选的,所述滑槽呈“凸”形凹槽,所述滑块呈“凸”形块状,所述滑块滑动连接在滑槽的内侧,所述连接槽呈圆槽状形状,所述连接槽呈两组,其作用是通过滑块在滑槽的内侧滑动,进而使得防护网可以在支撑侧板的外表面上下移动,使得防护网与推进器连接。
6、优选的,所述弹簧呈螺旋状形状,所述连接球呈半球状形状,所述连接球与连接槽相适配,所述连接球滑动连接在调节槽的内侧,其作用是当防护网覆盖在推进器的上表面时,在继续对防护网按压,使得连接球受到挤压向调节槽的内侧滑动,进而使得连接球与连接槽卡合连接,进而将防护网固定连接在推进器的上方,进而可以对推进器进行防护。
7、优选的,所述插槽一呈圆槽状形状,所述插槽一和固定柱都呈两组,所述插槽一与固定柱相适配,其作用是当对推进器进行安装时,通过将推进器外表面开设的插槽一对准固定柱,将固定柱与插槽一插合连接,继而将推进器初步安装到支撑侧板上。
8、优选的,所述插槽二呈圆槽状形状,所述插槽二呈两组,所述插杆呈圆柱形形状,所述插杆呈两组固定连接在两组安装板的内侧,所述插杆与插槽二相适配,其作用是当将推进器初步安装后,在通过将两组安装板内侧固定的插杆与插槽二插合连接,在通过螺栓将安装板固定连接在支撑侧板的外表面,进而将推进器与支撑侧板和安装板固定连接,进而将推进器彻底安装,不在需要通过螺栓安装推进器,方便后续对推进器的拆卸和替换。
9、与现有技术相比,本实用新型的有益效果是:
10、1、通过滑动防护网,使得滑块在滑槽的内侧滑动,进而使得防护网可以覆盖在推进器的上表面,在对防护网进行按压,使得在压力的作用下,防护网在推进器的上方继续向下滑动,使得在弹簧压缩,连接球在调节槽的内侧滑动,进而可以将防护网完全滑动与推进器连接,再弹簧的弹力作用下,连接球复位,进而插合进入到连接槽的内侧,进而将防护网与推进器固定连接,进而在水下作业时,防护网可以阻挡水底的水藻和杂物进入到推进器的内侧,进而可以对推进器进行防护。
11、2、当需要对推进器进行安装时,通过将两组固定柱与插槽一插合连接,进而可以将推进器与支撑侧板初步固定,再通过将两组安装板内侧固定连接的插杆与推进器外表面开设的两组插槽二分别插合连接,在通过螺栓将两组安装板固定连接在支撑侧板的外表面,进而可以将推进器安装到支撑侧板和安装板上,通过利用卡合连接安装推进器的方式替换螺栓连接的方式,进而方便后续对推进器的拆卸和替换。
技术特征:1.一种水下机器人支撑结构,包括支撑底板(1)和推进器(9),其特征在于:所述支撑底板(1)的外表面固定连接有支撑侧板(2),所述支撑侧板(2)的外表面底端通过螺栓固定连接有安装板(3),所述支撑侧板(2)的外表面开设有滑槽(5),所述滑槽(5)的内侧滑动连接有滑块(6),所述滑块(6)的外表面固定连接有防护网(7),所述防护网(7)的外表面开设有连接槽(8),所述推进器(9)的外表面开设有调节槽(12),所述调节槽(12)的内侧固定连接有弹簧(13),所述弹簧(13)的外表面固定连接有连接球(14)。
2.根据权利要求1所述的一种水下机器人支撑结构,其特征在于:所述支撑侧板(2)的外表面靠近安装板(3)的上方固定连接有固定柱(4),所述安装板(3)的内侧固定连接有插杆(15),所述推进器(9)外表面远离调节槽(12)的正下方开设有插槽二(11),所述推进器(9)远离插槽二(11)的外表面开设有插槽一(10)。
3.根据权利要求1所述的一种水下机器人支撑结构,其特征在于:所述安装板(3)呈板状形状,所述安装板(3)呈四组,所述安装板(3)的一侧外表面开设有半圆形凹槽,所述推进器(9)安装在两组安装板(3)之间,所述推进器(9)呈两组。
4.根据权利要求1所述的一种水下机器人支撑结构,其特征在于:所述滑槽(5)呈“凸”形凹槽,所述滑块(6)呈“凸”形块状,所述滑块(6)滑动连接在滑槽(5)的内侧,所述连接槽(8)呈圆槽状形状,所述连接槽(8)呈两组。
5.根据权利要求1所述的一种水下机器人支撑结构,其特征在于:所述弹簧(13)呈螺旋状形状,所述连接球(14)呈半球状形状,所述连接球(14)与连接槽(8)相适配,所述连接球(14)滑动连接在调节槽(12)的内侧。
6.根据权利要求2所述的一种水下机器人支撑结构,其特征在于:所述插槽一(10)呈圆槽状形状,所述插槽一(10)和固定柱(4)都呈两组,所述插槽一(10)与固定柱(4)相适配。
7.根据权利要求2所述的一种水下机器人支撑结构,其特征在于:所述插槽二(11)呈圆槽状形状,所述插槽二(11)呈两组,所述插杆(15)呈圆柱形形状,所述插杆(15)呈两组固定连接在两组安装板(3)的内侧,所述插杆(15)与插槽二(11)相适配。
技术总结本技术涉及水下机器人技术领域,具体为一种水下机器人支撑结构,包括支撑底板和推进器,所述支撑底板的外表面固定连接有支撑侧板。本技术通过滑动防护网,使得滑块在滑槽的内侧滑动,进而使得防护网可以覆盖在推进器的上表面,在对防护网进行按压,使得在压力的作用下,防护网在推进器的上方继续向下滑动,使得在弹簧压缩,连接球在调节槽的内侧滑动,进而可以将防护网完全滑动与推进器连接,再弹簧的弹力作用下,连接球复位,进而插合进入到连接槽的内侧,进而将防护网与推进器固定连接,进而在水下作业时,防护网可以阻挡水底的水藻和杂物进入到推进器的内侧,进而可以对推进器进行防护。技术研发人员:刘砚文,王泽霖,金光宇受保护的技术使用者:黑龙江展鸿研科技发展有限公司技术研发日:20231101技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225627.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表