机器人工具切换系统及自检方法与流程
- 国知局
- 2024-11-21 11:55:09
本发明涉及自动化领域,更具体地,涉及一种用于机器人工具切换系统的自检方法以及相应的系统。
背景技术:
1、在当前的汽车生产过程中,焊接是一个重要的步骤。在自动化的焊装车间中,如果使用到两把焊枪,焊接机器人会利用换枪盘来切换这两把焊枪。然而在使用的过程中,换枪盘往往会因为老化而发生卡死的现象。当该现象发生时,会影响生产。
2、在公告号为cn202639669u的专利“一种机器人焊接换枪盘保护装置”中,通过机器人换枪信号和机器人手臂复位信号来提供控制信号,进而导通或切断电源电路。该专利中的技术方案通过降低机器人在更换焊枪时换枪盘中电源针会产生的拉弧现象,提高了换枪盘的使用寿命。然而,该专利并未提出如何提前预防换枪盘故障。在公开号为cn113733146a的专利“一种机器人换枪盘的工具号自检方法”中,通过现场安装接线、信号配置等来实现对机器人在换枪盘快换应用中的工具号检测。然而,该专利中的检测方法需要配备很多的额外的设备进行检测,成本较大。
3、由上可知,在对换枪盘进行自检时,现有技术往往需要使用额外的设备并且也无法降低对产线的影响。
技术实现思路
1、本发明的目的在于提供一种具备自检能力的机器人工具切换系统,从而减低因换枪盘突然损坏而导致产线停产的影响,避免造成大量的损失。
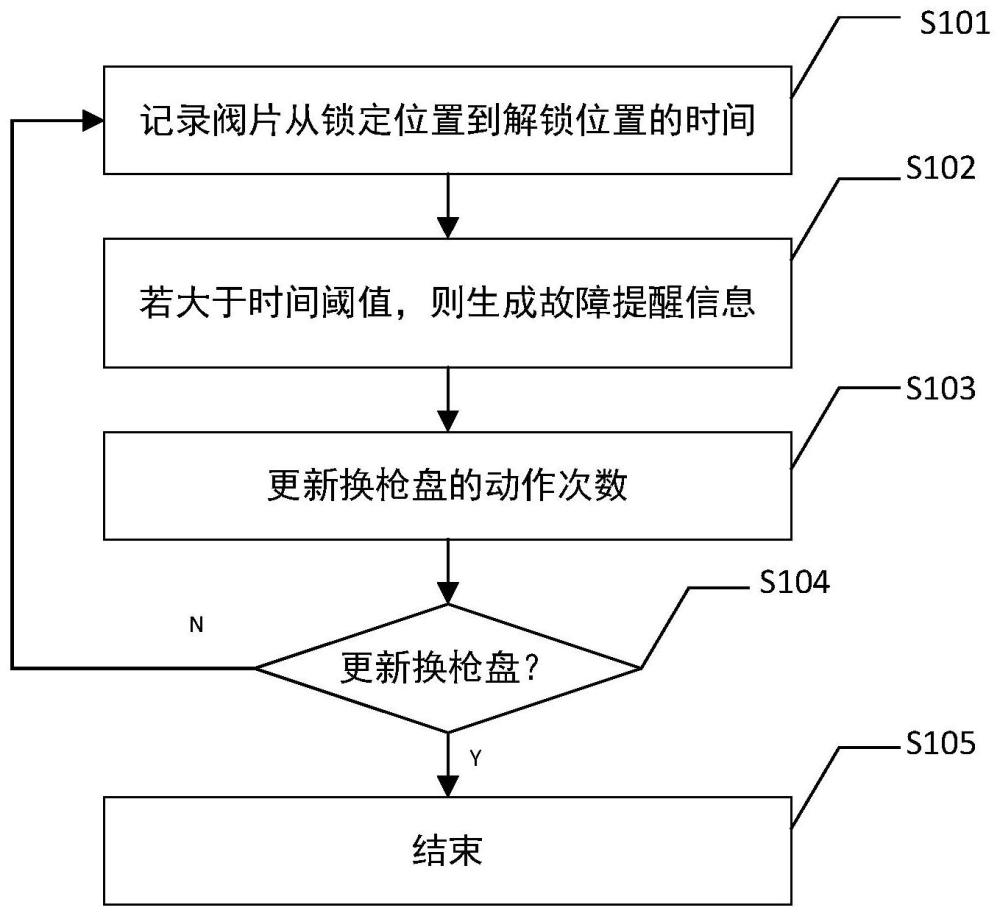
2、本发明的第一方面提供了一种机器人工具切换系统,包括:运动平台;支臂,其设置于运动平台上,通过换枪盘耦合到焊枪,所述换枪盘包括:缸体、解锁传感器以及设置于所述缸体内部的活塞组件,其中,所述解锁传感器用于监测所述活塞组件的位置,并且当所述活塞组件位于解锁位置时,所述解锁传感器提供解锁指示信号;以及处理模块,其耦合至所述支臂,并且被配置为:向处于锁定位置的所述活塞组件提供使能信号,并基于所述使能时刻和检测到所述解锁指示信号的解锁时刻,确定所述活塞组件从所述锁定位置到达所述解锁位置的行进时间,并且当所述行进时间大于第一阈值时,生成针对所述换枪盘的故障提醒信息;至少根据所述活塞组件到达所述解锁位置的次数,更新所述换枪盘的动作次数。
3、在一种实施例中,所述处理模块还被配置为:根据湿度、温度和粉尘度中的至少一个参数对所述动作次数进行更新。通过对湿度、温度等参数赋予不同的权重,能够较为准确地预估到换枪盘的使用寿命,提升了系统的适用性。
4、在一种实施例中,所述处理模块还被配置为:当所述行进时间大于第二阈值时,生成停止提醒信息。
5、在一种实施例中,所述处理模块被配置为:检测所述解锁传感器的解锁管脚上的电平,当检测到所述解锁管脚上出现指定的电平信号,则将该时刻确定为所述解锁时刻。这里提供了如何通过检测电平信号来获取解锁时刻的方式。
6、在一种实施例中,所述换枪盘还包括与所述活塞组件相耦合的磁环,并且,所述解锁传感器包括用于检测所述磁环在所述缸体内部的位置磁性传感器。这里提供了当解锁传感器为磁性传感器时,如何通过到位信号来获取解锁时刻。
7、在一种实施例中,所述处理模块还被配置为:若所述故障提醒信息的数目大于第三阈值,则生成所述停止提醒信息。
8、在一种实施例中,所述处理模块被配置为:基于所述行进时间与所述第一阈值之间的差值,来确定故障的紧急程度,其中,所述故障提醒信息还包括指示所述紧急程度的信息。如此,可以向用户告知当前的故障是否需要立即排除。
9、在一种实施例中,系统还包括:交互模块,其耦合至所述处理模块,并且包括触摸屏,所述触摸屏用于向用户提供文字和/或图形界面,并且接收用户的输入指令。如此,通过交互模块,可以实现与用户之间的互动,提升了系统的易用性。
10、本发明另一方面还提供了一种用于机器人工具切换系统中的换枪盘的自检方法,所述换枪盘包括缸体和设置于所述缸体内部的活塞组件,所述方法包括:基于所述活塞组件获取使能信号的时刻来确定使能时刻,并基于所述换枪盘提供活塞组件到达解锁位置的时刻,来确定所述活塞组件在所述缸体内部从锁定位置到达解锁位置的行进时间,若所述行进时间大于第一阈值,则生成针对所述换枪盘的故障提醒信息;至少根据所述活塞组件到达所述解锁位置的次数,来更新所述换枪盘的动作次数。如此,通过活塞组件到达解锁位置的时刻来确定换枪盘提供解锁指示信号的时刻。
11、在一种实施例中,所述自检方法还包括:根据湿度、温度、粉尘度中的一个或多个参数对所述动作次数进行更新。
12、在一种实施例中,所述自检方法还包括:当所述行进时间大于第二阈值时,生成所述停止提醒信息。
13、在一种实施例中,当所述故障提醒信息的数目大于第三阈值时,生成所述停止提醒信息。如此,当一个换枪盘多次出现故障时,可以生成停止提醒信息。
14、本发明另一方面还提供了一种非暂态的计算机可读介质,其上存储有计算机可执行指令,所述计算机可执行指令在由一个或更多个处理模块运行时使得所述一个或更多个处理模块执行任意一个上述的方法。
15、通过上述技术方案,大大减少了换枪盘卡滞的故障,可以直接将故障发生的次数降低至很低乃至零次,不仅给用户提前更换即将超出使用寿命的换枪盘提供的有力的数据支撑,还可以尽可能地对换枪盘进行使用,避免了资源浪费。另外,本发明的技术方案不需要大幅地更改产线设置,也不需要大量采购额外的器材,实现了低成本甚至零成本的物料消耗,并且自动焊接设备能够持续自检,不会因为突然损坏而对生产造成影响。
16、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其他特征及其优点将会变得更为清楚。
技术特征:1.一种机器人工具切换系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述处理模块还被配置为:根据湿度、温度和粉尘度中的至少一个参数对所述动作次数进行更新。
3.根据权利要求1所述的系统,其特征在于,所述处理模块还被配置为:当所述行进时间大于第二阈值时,生成停止提醒信息。
4.根据权利要求3所述的系统,其特征在于,所述处理模块还被配置为:若所述故障提醒信息的数目大于第三阈值,则生成所述停止提醒信息。
5.根据权利要求1所述的系统,其特征在于,所述处理模块被配置为:
6.根据权利要求1所述的系统,其特征在于,所述换枪盘还包括与所述活塞组件相耦合的磁环,其中,所述解锁传感器用于检测所述磁环在所述缸体内部的位置。
7.根据权利要求1所述的系统,其特征在于,所述处理模块被配置为:
8.根据权利要求1所述的系统,其特征在于,还包括:
9.一种用于机器人工具切换系统的换枪盘的自检方法,所述换枪盘包括缸体和设置于所述缸体内部的活塞组件,其特征在于,所述方法包括:
10.根据权利要求9所述的自检方法,其特征在于,还包括:根据湿度、温度、粉尘度中的一个或多个参数对所述动作次数进行更新。
11.根据权利要求9所述的自检方法,其特征在于,还包括:当所述行进时间大于第二阈值时,生成所述停止提醒信息。
12.根据权利要求11所述的自检方法,其特征在于,当所述故障提醒信息的数目大于第三阈值时,生成所述停止提醒信息。
13.一种非暂态的计算机可读介质,其上存储有计算机可执行指令,所述计算机可执行指令在由一个或更多个处理模块运行时使得所述一个或更多个处理模块执行根据权利要求9-12中的任意一个所述的方法。
技术总结本发明涉及机器人工具切换系统,其包括:运动平台;支臂,设置于运动平台上,通过换枪盘耦合到焊枪,换枪盘包括:缸体、解锁传感器以及设置于缸体内部的活塞组件,其中,解锁传感器设置在缸体之外,用于监测活塞组件的位置,并且当活塞组件位于解锁位置时,解锁传感器提供解锁指示信号;以及处理模块,其耦合至支臂,并且被配置为:向处于锁定位置的活塞组件提供使能信号,确定活塞组件从锁定位置到达解锁位置的行进时间,并且当行进时间大于第一阈值时,生成针对换枪盘的故障提醒信息;至少根据活塞组件到达解锁位置的次数,更新换枪盘的动作次数。本发明具备成本低、效率高的特点。技术研发人员:林阳受保护的技术使用者:华晨宝马汽车有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333391.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表