-
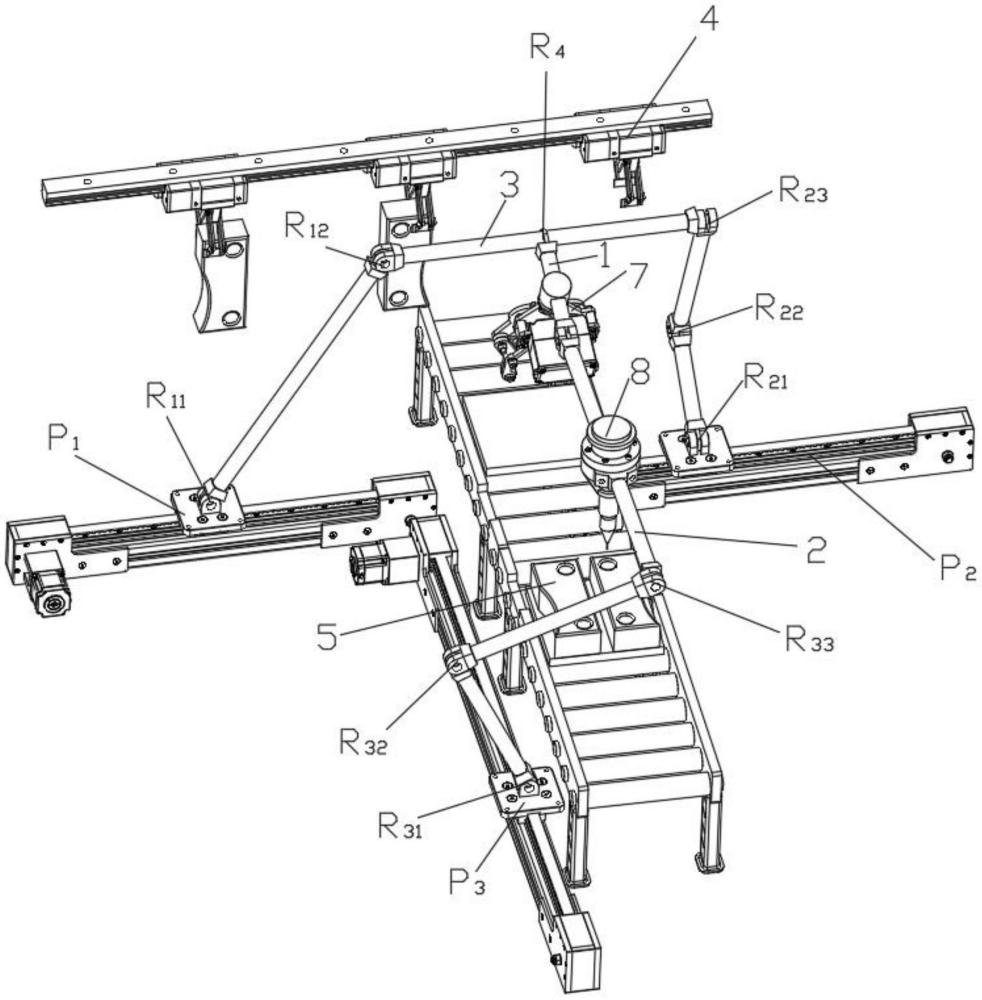
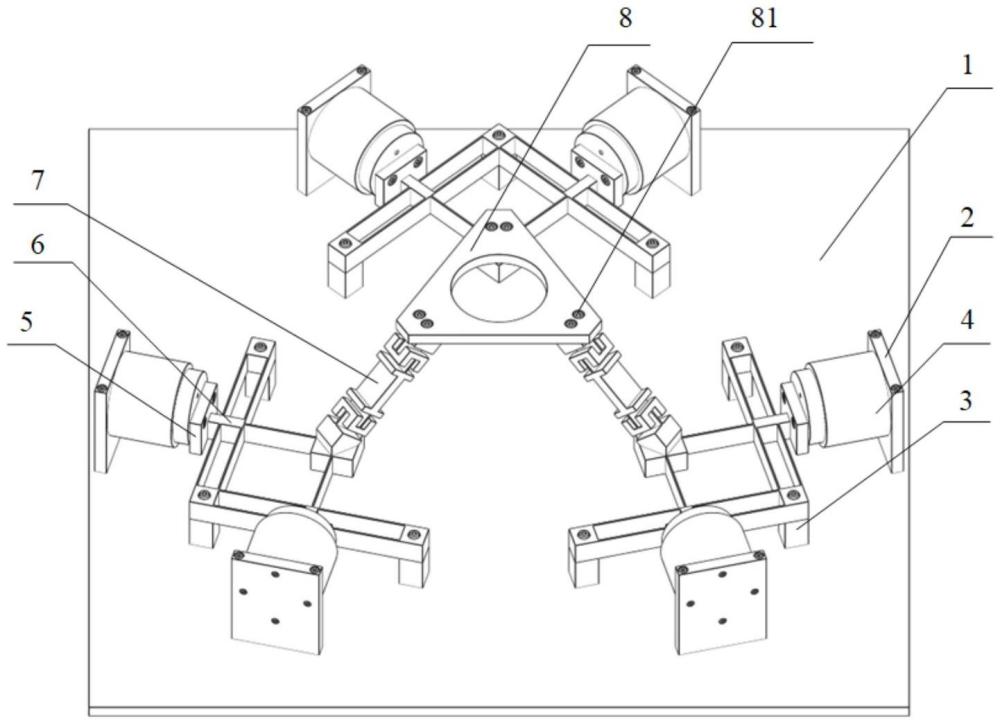
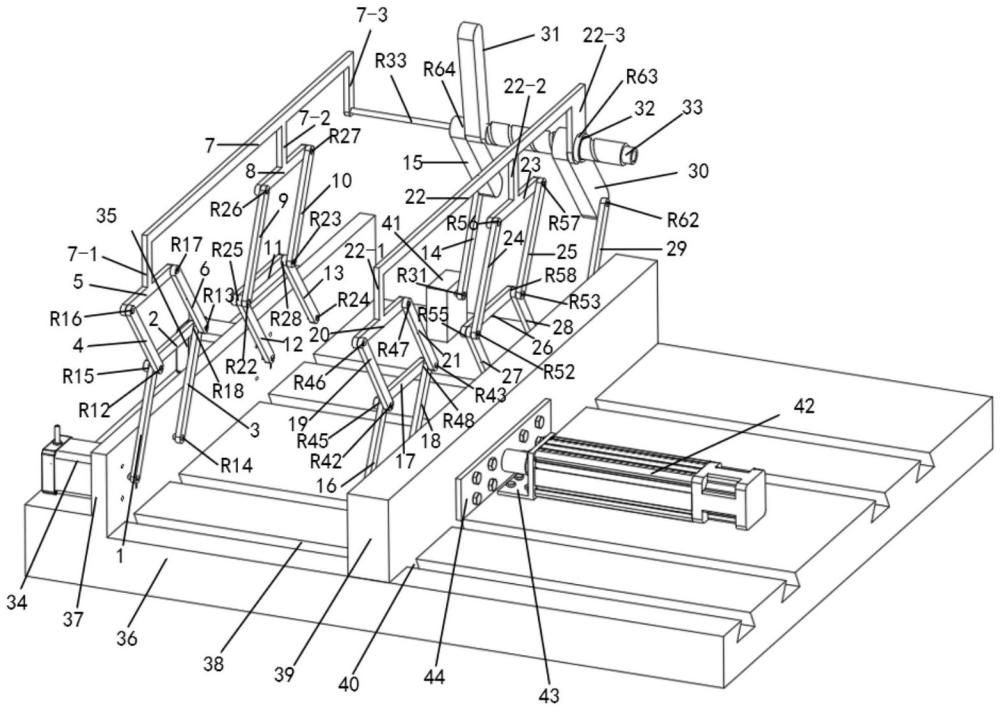
一种三自由度轮换输出模式焊接作业的机器人
本发明涉及并联机器机构,具体涉及一种三自由度轮换输出模式焊接作业的机器人。背景技术:1、在焊接作业生产线上,想要实现对物料的抓取和焊接作业,通常的做法是配备一个抓取机器人和焊接机器人,例如中国发明专利......
-
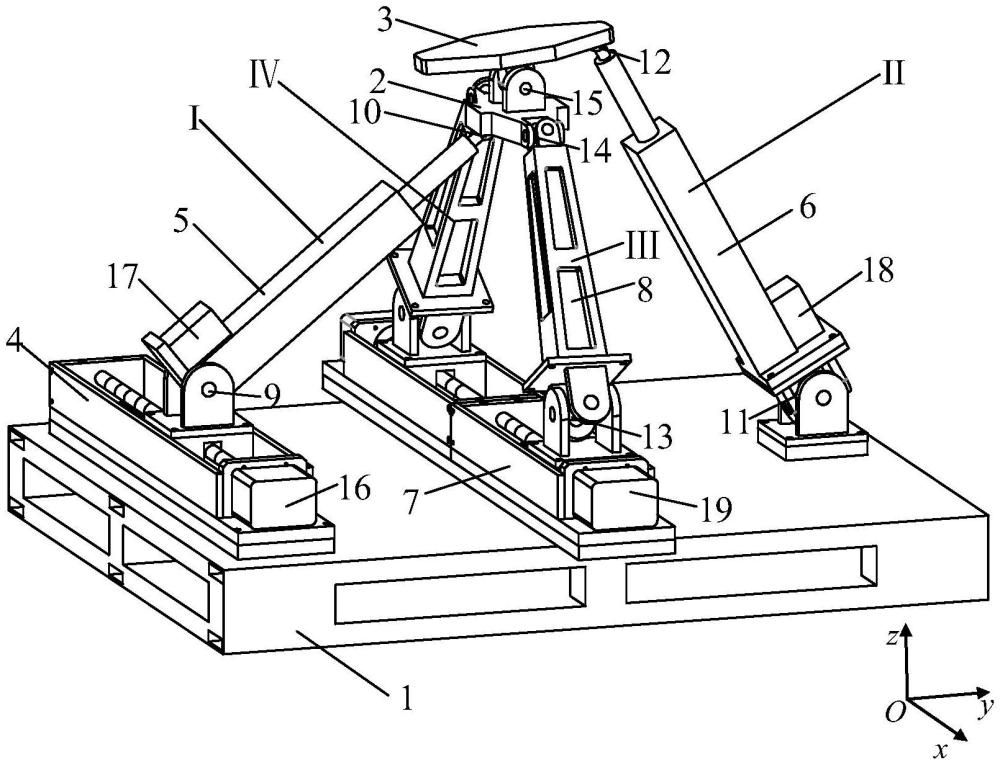
一种含有双动平台的五自由度复合驱动并联机构
本发明属于并联机构,具体涉及一种含有双动平台的五自由度复合驱动并联机构。背景技术:1、由于并联机构具有刚度大、承载能力强和定位精度高等优点,因此在工业制造领域具有良好的应用前景,特别是在精密加工与制造......
-
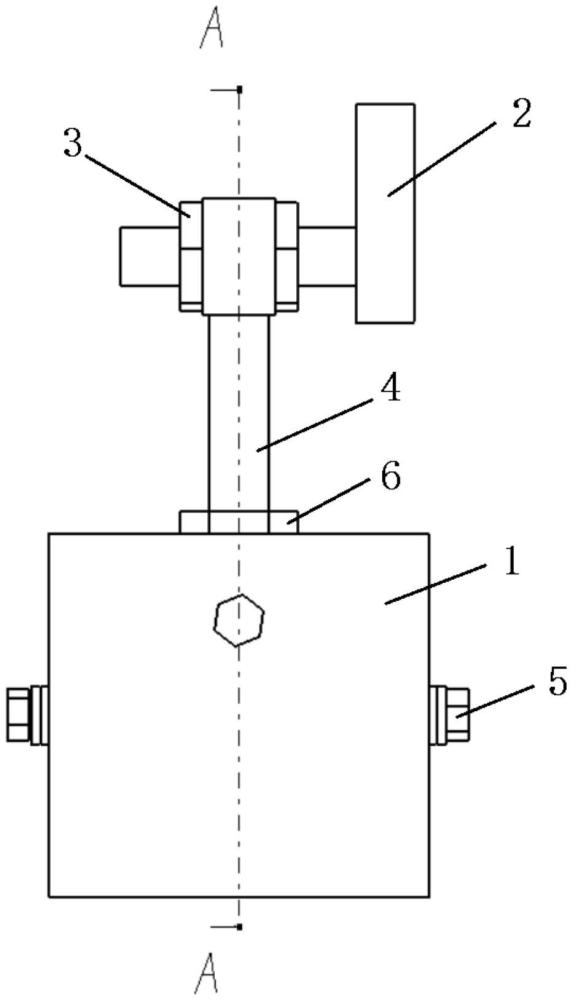
一种六自由度调节接头及调节方法与流程
本发明属于飞行器接头设计领域,涉及一种六自由度调节接头及调节方法。背景技术:1、由于飞行器结构对接头使用的精度要求,因此飞行器设计和制造过程中对接头自身的制造精度提出了严格的要求,导致增加制造成本、降......
-

一种基于少自由度并联机构的AUV艏部变体减阻结构
本发明属于水下仿生航行器,尤其涉及一种基于少自由度并联机构的auv艏部变体减阻结构。背景技术:1、传统的水下无人航行器存在噪声大、对周围流体环境的扰动大、启动加速慢、转弯半径大、灵活性和隐蔽性较差等缺......
-
一种多自由度手术机器人高频超声刀的制作方法
本发明涉及超声刀领域,特别涉及一种多自由度手术机器人高频超声刀。背景技术:1、目前微创手术机器人的应用已经非常广泛,而外科手术使用超声刀也基本普遍,为了更好的发挥微创手术机器人的优势,市面上出现了多种......
-

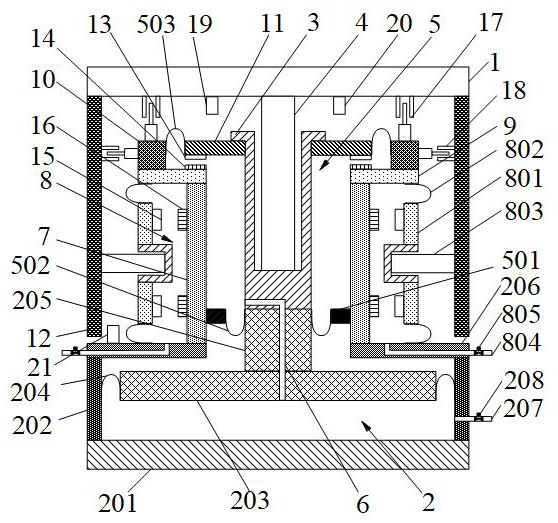
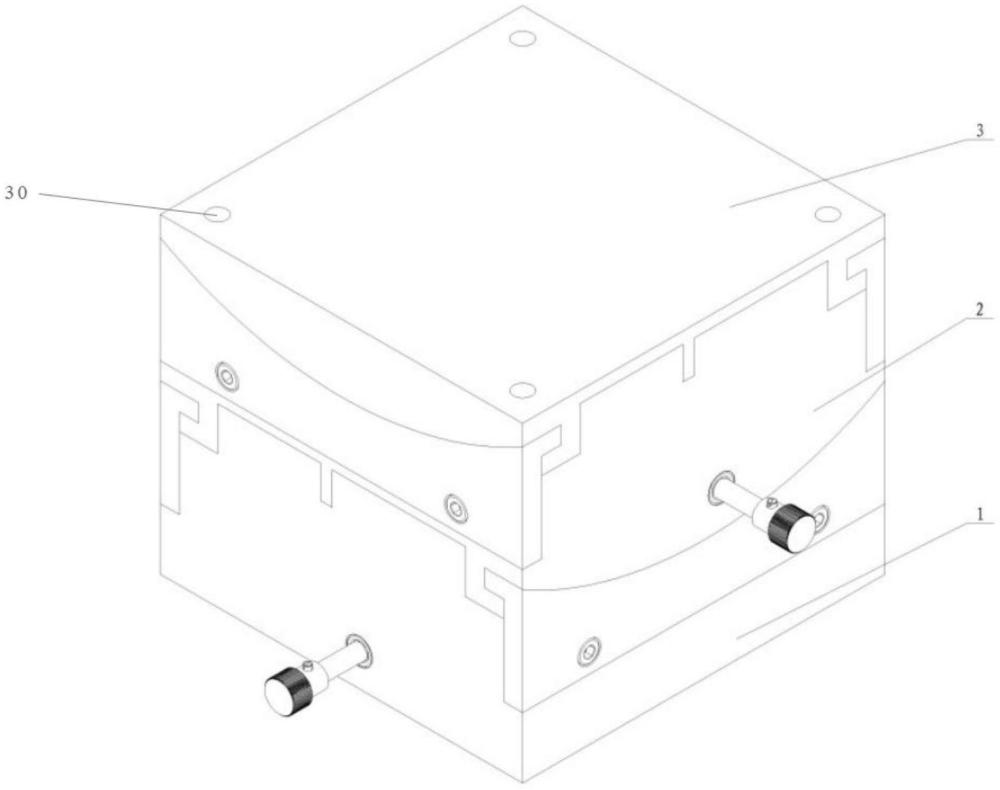
一种六自由度准零刚度隔振平台的制作方法
本发明涉及隔振装置,具体是一种六自由度准零刚度隔振平台。背景技术:1、目前半导体行业飞速发展,半导体生产设备的精度要求越来越高,设备对微振动等环境的要求也越来越敏感,少许的微振动就会降低设备的产出良率......
-

用于传感器姿态调整的三自由度压电驱动器及其激励方法
本发明涉及微型多自由度驱动器,尤其涉及用于传感器姿态调整的三自由度微型压电驱动器及其激励方法。背景技术:1、微小型传感器是医疗健康、环境监测、工业控制等领域中的重要器件,起到了数据收集与检测、实时反馈......
-
一种基于磁-气可变刚度三自由度隔振器的制作方法
本发明涉及半导体专用器件,具体是一种基于磁-气可变刚度三自由度隔振器。背景技术:1、目前半导体行业飞速发展,半导体生产设备的精度要求越来越高,设备对微振动等环境的要求也越来越敏感,少许的微振动就会降低......
-
一种高自由度链条自动压印机构及其压印方法与流程
本发明涉及链条压印,特别涉及一种高自由度链条自动压印机构及其压印方法。背景技术:1、在工业生产中,标记零件的信息如材料、生产批次等是必需的。传统方法包括手工盖章、喷漆或贴标签,这些方式效率低、成本高,......
-
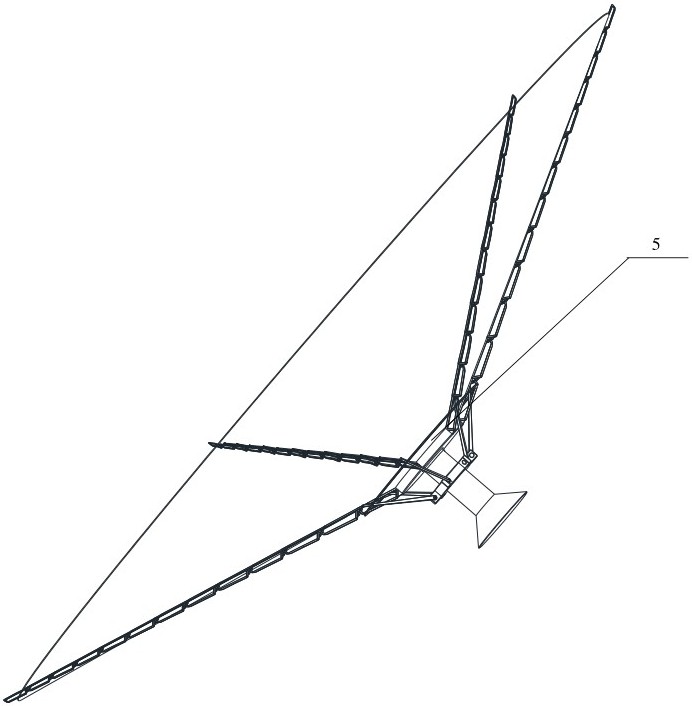
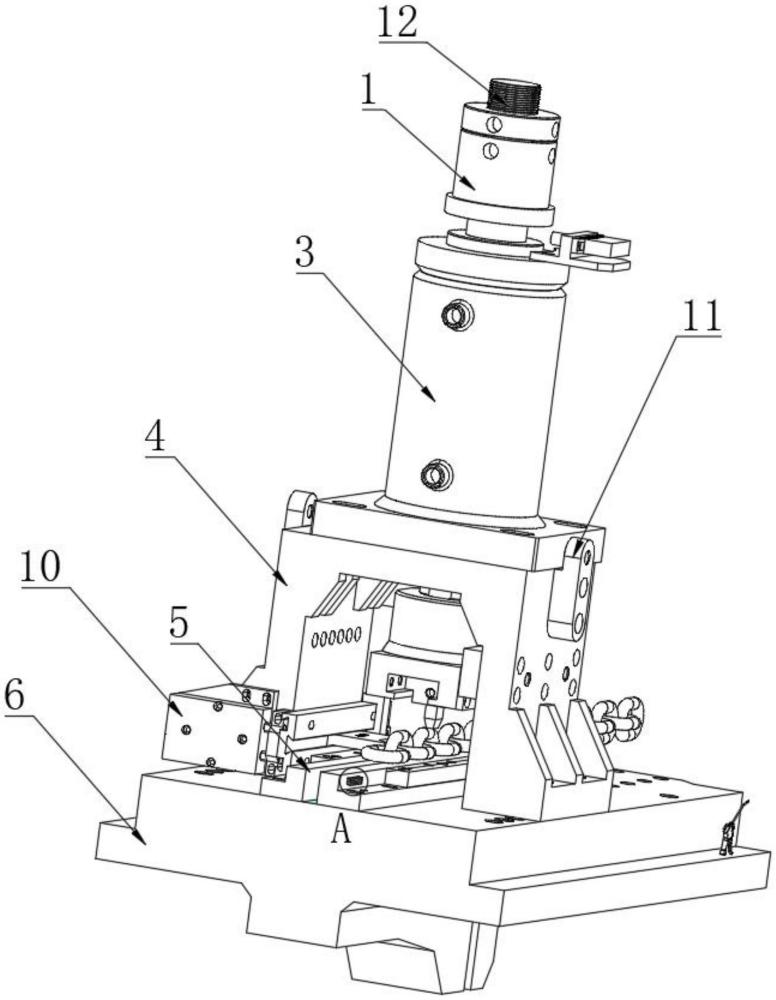
一种单自由度可螺旋折展的联动型肋式可展开天线
本发明涉及折展天线,具体涉及一种单自由度可螺旋折展的联动型肋式可展开天线。背景技术:1、目前,各国在航天领域的竞争愈发激烈,随着我国航空航天事业的不断发展,航空航天领域的技术压在不断突破,空间可展机构......
-
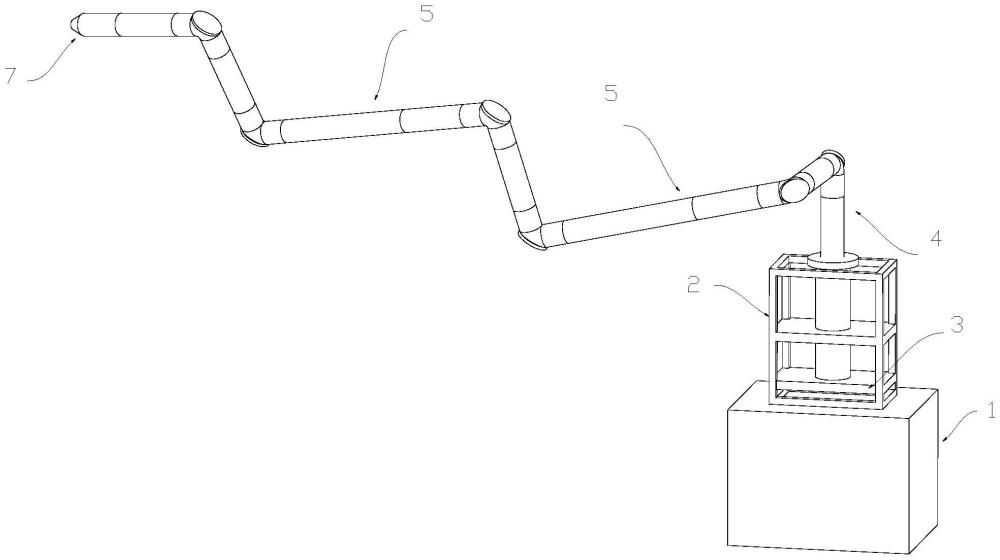
一种多自由度激光加工机器人
本发明涉及多轴机器人,尤其涉及一种多自由度激光加工机器人。背景技术:1、核设施退役是能源转型的重要环节,对国计民生和环境安全至关重要。目前,我国在该领域的研究尚浅,但随着2030年核设施退役高峰的临近......
-
一种六自由度大行程柔性微纳米末端定位平台
本发明涉及微纳米定位,具体涉及一种六自由度大行程柔性微纳米末端定位平台。背景技术:1、随着纳米技术、生物技术、信息技术和先进制造技术的飞速发展,六自由度微纳米末端定位平台在精密工程领域发挥着越来越重要......
-
完全解耦高承载三自由度平面机器人
本发明属于机器人,具体涉及完全解耦高承载三自由度平面机器人。背景技术:1、随着并联机器人的发展,并联机构作为机器人机构学领域中最活跃的分支,一直受到国内外学术界和工业领域的重视和青睐。高精密并联定位机......
-
一种惯性传感器探头装置及多自由度检测方法
本技术属于电容位移传感测试领域,更具体地,涉及一种惯性传感器探头装置及多自由度检测方法。背景技术:1、天琴计划是我国独立提出的一个空间引力波探测计划。基于电容位移传感和静电反馈控制技术的空间惯性传感器......
-
一种多自由度解耦的波浪能发电装置及其工作方法
本申请涉及波浪能发电,特别涉及一种多自由度解耦的波浪能发电装置及其工作方法。背景技术:1、海洋储存着如风能、波浪能、潮汐能,地热能等诸多可再生的清洁能源。其中,波浪能具备能量密度高、分布广泛且储量大的......
-
一种两自由度角度调整装置及应用的制作方法
本发明属于角度调整机构,尤其涉及一种两自由度角度调整装置及应用。背景技术:1、激光在数据传输领域得到广泛应用,主要得益于其高速、高带宽和低延迟等显著优势。然而,激光器等光源所发出的光束直径通常较小,在......
-
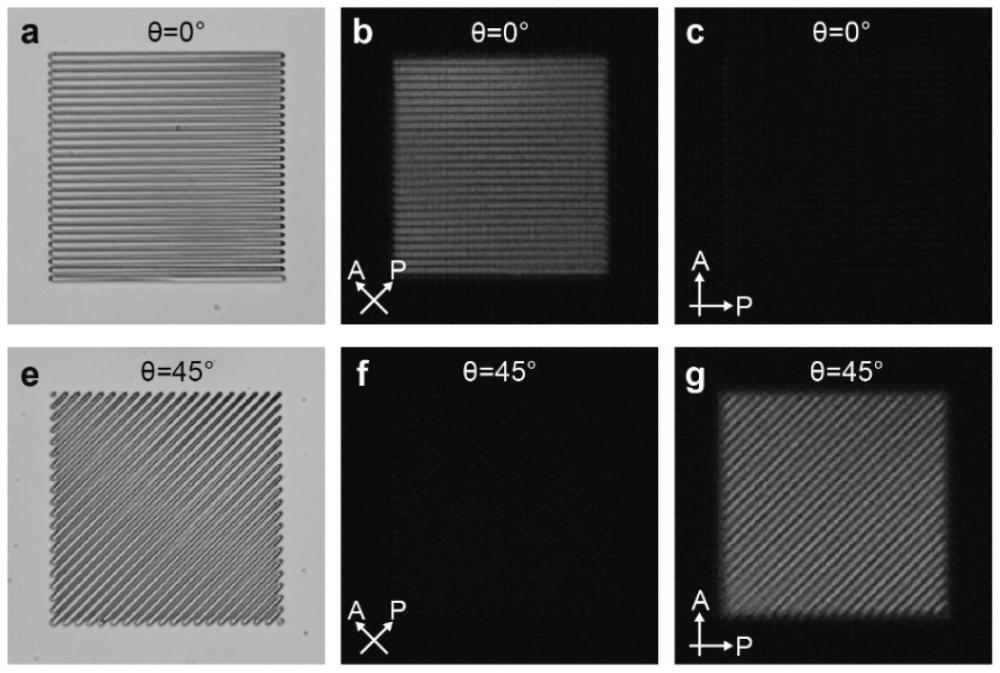
一种基于激光直写的高自由度液晶分子组装方法
本发明涉及液晶分子组装领域,尤其涉及一种基于激光直写的高自由度液晶分子组装方法。背景技术:1、液晶材料因为具有优异的光电性能,被广泛用于液晶显示、光电子器件、传感器、智能窗户、致动器件等。液晶这种材料......
-
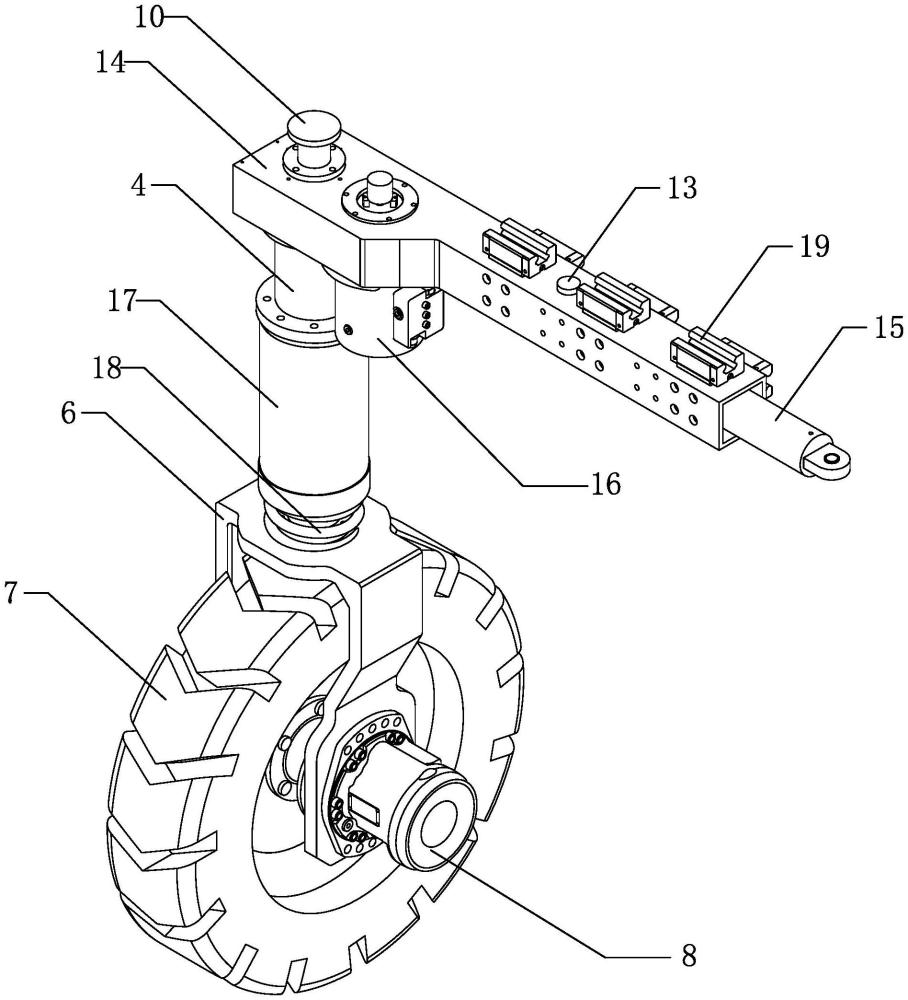
一种多自由度轮腿机构
本发明涉及农业机器人,具体涉及一种用于农业机器人的多自由度轮腿机构。背景技术:1、农业是国民经济的基础,现代化农业机器人装备是高质量农业发展的重要保障,农业机器人底盘作为驱动系统和各部件的总成,在农业......
-
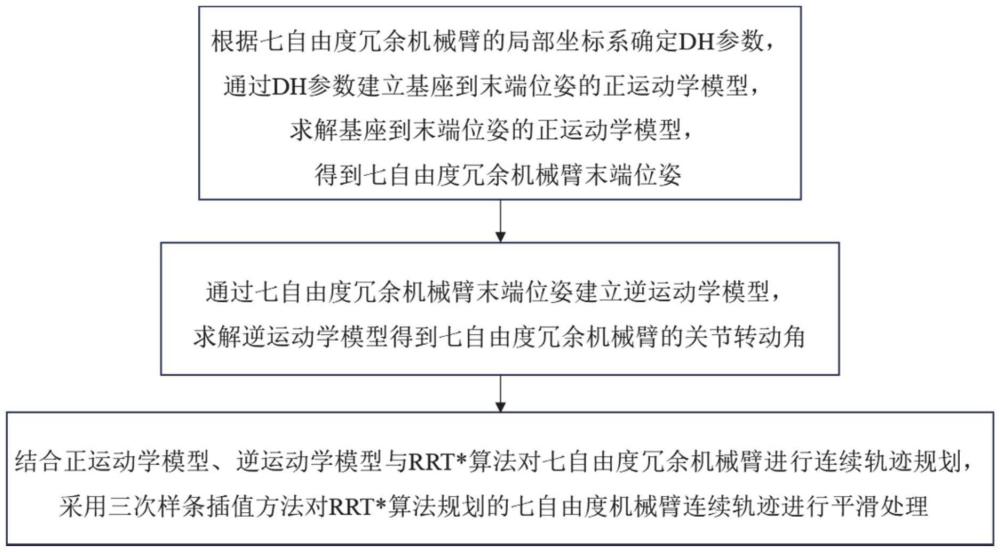
一种七自由度冗余机械臂的轨迹规划方法和系统
本发明属于运动控制领域,具体涉及一种七自由度冗余机械臂的轨迹规划方法和系统。背景技术:1、随着工业自动化和空间技术的发展,对机械臂的操作灵活性和功能性提出了更高的要求。冗余机械臂因其多余的自由度能够在......
-
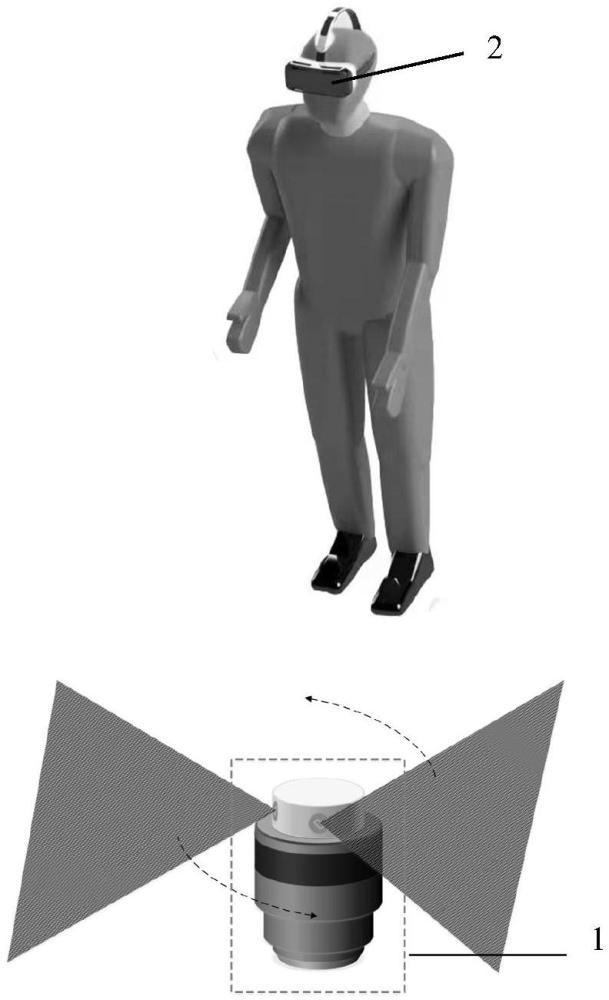
一种光电扫描与相机集成的六自由度定位方法和系统
本发明涉及虚拟现实(virtual reality,vr)、增强现实(argument reality,ar)领域,具体涉及一种光电扫描与相机集成的vr/ar六自由度定位方法和系统。背景技术:1、目前......
-
一种有限自由度全向可重构发射线圈结构及扩展结构
本发明属于无线电能传输,特别是涉及到一种有限自由度全向可重构发射线圈结构及扩展结构。背景技术:1、无线电能传输技术(wpt)即:用电设备以非接触方式从固定电网取电的技术,它实现了电源的便捷和安全接入,......
-
一种高自由度的多角度切割车的制作方法
本技术涉及切割车,特别涉及一种高自由度的多角度切割车。背景技术:1、切割车主要指车身覆盖件或结构件进行切割更换的车辆,而切割也是在维修事故车中常见的维修手法,其中包括进行纵梁切割、a柱切割、b柱切割、......
-
一种感知驱动一体的多自由度变刚度仿生柔性灵巧手
本发明属于机器人,特别涉及一种感知驱动一体的多自由度变刚度仿生柔性灵巧手。背景技术:1、机器手作为机器人领域的一个重要组成部位,也是研究的热点和难点,灵巧手在操作空间内对目标实施抓取时,灵巧手指的自由......
-
用于晶圆精密定位的三自由度平面柔性机构及微动台
本发明属于半导体制造装备,涉及一种用于晶圆精密定位的三自由度平面柔性机构及微动台。背景技术:1、半导体芯片在制造过程中,需要在晶圆表面执行光刻、刻蚀、离子注入及薄膜沉积等一系列精密工艺步骤。在如曝光和......
-
应用于单自由度直驱式波浪能发电系统的永磁直线发电机优化控制方法
本发明涉及单自由度直驱式波浪能发电,具体为应用于单自由度直驱式波浪能发电系统的永磁直线发电机优化控制方法。背景技术:1、永磁直线发电机具有结构简单、运行可靠、效率高等优点,这使得它在波浪能发电领域具有......
技术新讯 > 自由度 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01