一种多自由度激光加工机器人
- 国知局
- 2024-10-15 09:41:50
本发明涉及多轴机器人,尤其涉及一种多自由度激光加工机器人。
背景技术:
1、核设施退役是能源转型的重要环节,对国计民生和环境安全至关重要。目前,我国在该领域的研究尚浅,但随着2030年核设施退役高峰的临近,切割拆解、表面清洗等关键技术需求凸显。因此,我们需要加快技术研发步伐,确保退役工作的安全与高效进行。
2、激光清洗是核设施退役清洁化处理的核心步骤,激光机器人在其中发挥关键作用。现有的激光机器人通常通过在末端执行器上安装激光发生器来实现退役核设施中的激光清洗和烧蚀等操作,这样将激光发生装置安装于机械臂末端,会导致机器人末端执行器出现的大负载、大惯量的弊端,同时可能限制机械臂末端的移动范围,进而引发机器人运行速度过慢、出现异常行为或运行不稳定等情况。
技术实现思路
1、为解决背景技术中所提出的技术问题,本发明提供一种多自由度激光加工机器人。
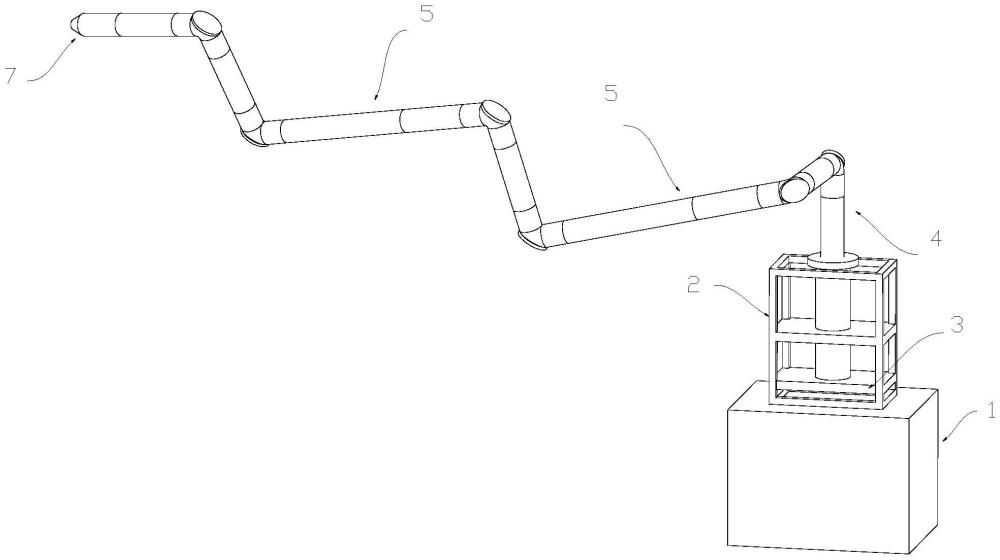
2、本发明采用以下技术方案实现:一种多自由度激光加工机器人,包括工作台、设于工作台上的支架、安装在支架底部的激光发生器、与激光发生器连接的基础导光臂,基础导光臂的另一端串接若干个能够相对转动的转动导光单元,且最后一个转动导光单元的末端安装有出光器;
3、转动导光单元包括转动关节、导光臂以及“l”形的弯管,转动关节的一端和导光臂同轴转动连接,转动关节和导光臂之间通过转动驱动模块实现相对转动,导光臂的另一端和弯管的一端连接,弯管的另一端用于和另一组转动导光单元中的转动关节连接,弯管的弯折处还设置有激光反射模块;
4、其中:转动关节、导光臂、弯管以及激光反射模块组成能够供激光通过的光路,以使得激光束最终通过出光器而射出。
5、作为上述方案的进一步改进,导光臂的一端具有转动连接部,转动连接部与转动关节相对转动套接,转动驱动模块包括固定在转动关节的外壁的伺服电机一、固定套接在转动关节外壁的齿圈一,伺服电机一的输出端连接有能够和齿圈一啮合的直齿轮一。
6、通过上述方案,能够实现多个转动导光单元的串接,并且相邻的转动导光单元能够相对转动,从而实现多自由度的调节工作。
7、作为上述方案的进一步改进,导光臂的一端设置有导光臂法兰,弯管的两端均设置有弯管法兰,且弯管法兰和导光臂法兰连接。
8、通过上述结构,能够方便安装导管臂和弯管,安装拆卸更加高效。
9、作为上述方案的进一步改进,导光臂包括第一伸缩管、第二伸缩管,其中,第一伸缩管的一端面开设有插接槽,第二伸缩管的一端面固定有与其同轴的插接部,插接部与插接槽活动插接,且第一伸缩管和第二伸缩管之间通过伸缩调节模块实现二者在轴向相对移动。
10、通过上述方案,能够实现轴向的调节,从而使得工作范围更大,适用性更广。
11、作为上述方案的进一步改进,伸缩调节模块包括活动套设在第一伸缩管外侧的套筒、固定在套筒一端的环形板、固定在环形板一侧的伺服电机二、固定在导光臂法兰外环面上的齿圈二,伺服电机二的输出端连接有直齿轮二,直齿轮二能够和齿圈二啮合,套筒的一端延伸至插接部的外侧,且套筒的一侧内壁周向均匀固定有若干导向单元,插接部的外壁开分别与导向单元滑动配合的导向槽,导向槽呈螺旋设置。
12、通过上述结构,能够利用伺服电机二带动直齿轮二使得导向单元沿着螺旋设置的导向槽活动,从而使得插接部在插接槽中轴向移动。
13、作为上述方案的进一步改进,弯管的外壁中部开设有安装孔,激光反射模块安装在安装孔处。
14、作为上述方案的进一步改进,激光反射模块包括固定在安装孔中的镜座壳体和安装在其中的激光反射镜片,镜座壳体的外端开口,镜座壳体的另一端开设有供激光射入的穿孔,镜座壳体内底部固定有环形的固定台,镜座壳体内还活动设置有能够在其深度方向移动的活动台,且活动台和固定台之间通过若干根连接弹簧连接;
15、激光反射模块还包括用于固定反射镜片的定位单元。
16、通过上述的结构,能够将激光反射镜片固定,从而使得激光经过激光反射镜片反射在各个转动导光单元中传输,最新实现激光成功射出。
17、作为上述方案的进一步改进,镜座壳体内壁开设若干条沿其深度方向延伸的导向滑槽,活动台的外周侧固定有和导向滑槽滑动配合的滑块。
18、定位单元包括固定在滑块顶部的底杆、通过销轴转动连接在底杆顶部的下压杆,且销轴上安装有扭簧,以使得下压杆保持向下转动的趋势。
19、通过上述结构能够在下压激光反射镜片时,带动活动台下移到合适位置,利用下压杆自动下压将激光反射镜片固定。
20、作为上述方案的进一步改进,定位单元还包括固定在导向滑槽顶部的限位板、固定在限位板底端的导向杆、滑动套设在导向杆外侧的活动块,限位板沿导向滑槽延伸方向设置,且导向杆和下压杆错位设置,使得导向杆不会阻碍下压杆向下翻转,下压杆靠近底杆的一侧固定有凸块,活动块的靠近底杆的一侧具有卡口,凸块能够进入该开口中且二者过盈配合。
21、通过上述方案,能够在安装激光反射镜片前,使得下压杆被限位板阻挡,继续下压激光反射镜片,使得限位板不在阻挡下压杆翻转,从而自动的将激光反射镜片固定,更加方便安装。
22、作为上述方案的进一步改进,镜座壳体由相互螺旋连接的外壳和内壳组成,且内壳的顶部具有延伸部,内壳的壳体中固定有若干个沿其深度方向设置的插杆座,每个插杆座处均活动插设有连接杆,连接杆的另一端和活动台卡接,内壳的壳体中沿周向分布若干个径向设置的贯穿孔,贯穿孔处均活动设置有压紧杆,外壳的内壁底部开设有螺旋导槽,压紧杆的末端与螺旋导槽的底面接触,且螺旋导槽的底面为起伏的波浪形曲面,从而推动压紧杆的另一端抵紧在连接杆的外壁,以固定连接杆的位置。
23、通过上述方案,能够在激光反射镜片被固定后再固定活动台的位置,从而进一步稳定激光反射镜片在镜座壳体中的深度位置,使得其稳定反射激光。
24、相比现有技术,本发明的有益效果在于:
25、本发明提出的一种多自由度激光加工机器人,包括工作台、设于工作台上的支架、安装在支架底部的激光发生器、与激光发生器连接的基础导光臂,基础导光臂的另一端串接若干个能够相对转动的转动导光单元,且最后一个转动导光单元的末端安装有出光器;
26、本发明通过上述设计能够将激光发生器从机械臂末端移动到工作台上,从而减小负载,结构更加轻便,使得机械臂工作更加方便可靠。
27、本发明提出的转动导光单元包括转动关节、导光臂以及“l”形的弯管,转动关节的一端和导光臂同轴转动连接,转动关节和导光臂之间通过转动驱动模块实现相对转动,导光臂的另一端和弯管的一端连接,弯管的另一端用于和另一组转动导光单元中的转动关节连接,弯管的弯折处还设置有激光反射模块;其中:转动关节、导光臂、弯管以及激光反射模块组成能够供激光通过的光路,以使得激光束最终通过出光器而射出。
28、本发明通过上述结构能够实现激光稳定传输,并且多自由度调节其执行末端的位置,适应更复杂的工作环境,适用性广。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315051.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。