完全解耦高承载三自由度平面机器人
- 国知局
- 2024-09-14 15:06:28
本发明属于机器人,具体涉及完全解耦高承载三自由度平面机器人。
背景技术:
1、随着并联机器人的发展,并联机构作为机器人机构学领域中最活跃的分支,一直受到国内外学术界和工业领域的重视和青睐。高精密并联定位机构具有刚度大、运动精度高、易于控制等优点,得到了越来越广泛的研究。
2、驱动电机位于并联机构的机架中,对于传统承载机构,由于电机位于起重臂上,动力需要通过传动装置(如齿轮、传动轴等)传输到起重臂的工作部位。在这个过程中,会存在能量损耗和传输效率低的问题,降低了设备的工作效率。而且设备的电机通常比较大且重量较重,这会增加起重臂的整体重量和体积。传统承载机构由于驱动电机与机械爪之间的物理连接,使得机械爪的负载能力受到限制,驱动电机的重量和承载能力直接影响机械爪的负载能力,同时,传统承载机构中,驱动电机与机械爪之间的传动元件(如齿轮、传动带等)会引入传动误差和回程间隙,从而降低了控制精度和稳定性。将驱动电机置于机架上可以减少传动元件,减少传动误差,提高控制精度和稳定性;再者,起重臂上的电机暴露在外部环境中,容易受到恶劣天气和工作环境的影响,增加了电机的故障率。而且由于电机位于高处,维护和维修起重臂上的电机需要进行高空作业,增加了操作的风险和维护的难度,这对于设备的运输、安装和操作都带来了一定的困难。
技术实现思路
1、本发明的目的是提供了完全解耦高承载三自由度平面机器人,此机构具有承载能力大、机构运动灵活及整体结构稳定的优点。
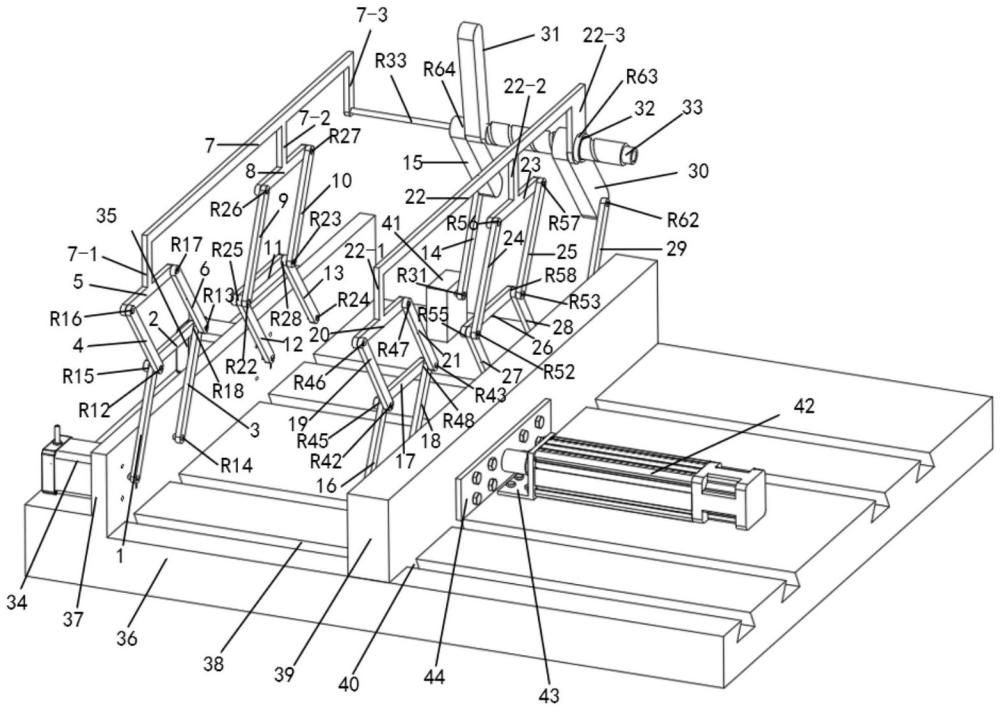
2、本发明所采用的技术方案是,完全解耦高承载三自由度平面机器人,包括有机架组件、第一运动单元及第二运动单元;第一运动单元与第二运动单元通过螺杆连接;
3、机架组件均与第一运动单元及第二运动单元连接。
4、本发明的特征还在于:
5、机架组件包括有基板,基板上设有第一机架,第一机架一侧的基板上表面设有第一电机及第二电机;第一机架另一侧的基板上表面开有若干个滑槽;机架组件还包括有第二机架,第二机架的底部设有若干个滑块,滑块与滑槽一一对应,配合使用;第一机架与第二机架之间的基板的上表面还设有固定块;第二机架一侧的基板上设有电推杆,电推杆通过l型的推杆座连接板与基板固接;电推杆的推杆端部通过推杆连接板与第二机架连接;第一运动单元分别与第一机架、固定块连接、第一电机及第二电机连接;第二机架与第二运动单元连接。
6、第一运动单元包括有第一连接杆组件、第一支链、第二支链及第三支链;
7、第一连接杆组件包括第七连杆,第七连杆上设有第一支杆、第二支杆及第三支杆;
8、第一支链包括有第一四边形机构及第二四边形机构;所述第一四边形机构包括有依次连接的第四连杆、转动副r16、第五连杆、转动副r17及第六连杆;第二四边形机构包括有依次连接的第一连杆、转动副r15、第二连杆、转动副r18及第三连杆;第四连杆还通过转动副r12与第一连杆的一端连接,第一连杆的另一端与穿过第一机架的第一电机的电机轴固接;第六连杆还通过转动副r13与第三连杆的一端连接,第三连杆的另一端部通过转动副r14与第一机架连接;第五连杆还与第一支杆连接,第五连杆与第一支杆相互垂直;
9、其中,第四连杆与第六连杆平行,第一连杆与第三连杆平行,第五连杆与第二连杆平行;
10、第二支链包括有第三四边形机构及第四四边形机构;所述第三四边形机构包括有依次连接的第九连杆、转动副r26、第八连杆、转动副r27及第十连杆;第四四边形机构包括有依次连接的第十二连杆、转动副r25、第十一连杆、转动副r28及第十三连杆;第九连杆还通过转动副r22与第十二连杆的一端连接,第十二连杆的另一端与穿过第一机架的第二电机的电机轴固接;第十连杆还通过转动副r23与第十三连杆的一端连接,第十三连杆的另一端部通过转动副r24与第一机架连接;第八连杆还与第二支杆连接,第八连杆与第二支杆相互垂直;
11、其中,第九连杆与第十连杆平行,第十二连杆与第十三连杆平行,第八连杆与第十一连杆平行;
12、第三支链包括有转动副r33、第十五连杆、转动副r32、第十四连杆及转动副r31;第十五连杆第一端的第一侧壁通过转动副r33与第三支杆连接,第十五连杆的第二端通过转动副r32与第十四连杆的第一端连接,第十四连杆的第二端通过转动副r31与固定块连接;还包括有转动副r64及第三十一连杆,第十五连杆第一端的第二侧壁还通过转动副r64与第三十一连杆第一端的第一侧壁连接,第三十一连杆第一端的第二侧壁通过螺杆与第二运动单元连接。
13、第二运动单元包括有第二连接杆组件、第四支链、第五支链及第六支链;
14、第二连接杆组件包括第二十二连杆,第二十二连杆上设有第四支杆、第五支杆及第六支杆;
15、第四支链包括有第五四边形机构及第六四边形机构;所述第五四边形机构包括有依次连接的第十九连杆、转动副r46、第二十连杆、转动副r47及第二十一连杆;第六四边形机构包括有依次连接的第十六连杆、转动副r45、第十七连杆、转动副r48及第十八连杆;第十九连杆还通过转动副r42与第十六连杆的一端连接,第十六连杆的另一端通过转动副r41与第二机架连接;第二十一连杆还通过转动副r43与第十八连杆的一端连接,第十八连杆的另一端部通过转动副r44与第二机架连接;第二十连杆还与第四支杆连接,第二十连杆与第四支杆相互垂直;
16、其中,第十九连杆与第二十一连杆平行,第十六连杆与第十八连杆平行,第二十连杆与第十七连杆平行;
17、第五支链包括有第七四边形机构及第八四边形机构;第七四边形机构包括有依次连接的第二十四连杆、转动副r56、第二十三连杆、转动副r57及第二十五连杆;第六四边形机构包括有依次连接的第二十七连杆、转动副r55、第二十六连杆、转动副r58及第二十八连杆;第二十四连杆还通过转动副r52与第二十七连杆的一端连接,第二十七连杆的另一端通过转动副r51与第二机架连接;第二十五连杆还通过转动副r53与第二十八连杆的一端连接,第二十八连杆的另一端部通过转动副r54与第二机架连接;第二十三连杆还与第五支杆连接,第二十三连杆与第五支杆相互垂直;
18、其中,第二十四连杆与第二十五连杆平行,第二十七连杆与第二十八连杆平行,第二十三连杆与第二十六连杆平行;
19、第六支链包括有依次连接第三十连杆、转动副r62及第二十九连杆;还包括有由内向外依次套接的螺母及转动副r63,螺母套在螺杆的外壁上,第六支杆的一端端部通过转动副r63与第三十连杆的第一端连接,第三十连杆的第二端通过转动副r62与第二十九连杆的第一端连接,第二十九连杆的第二端通过转动副r61与第二机架连接。
20、滑块及滑槽的横截面为等腰梯形。
21、本发明的有益效果是:
22、(1)本发明完全解耦高承载三自由度平面机器人,具有承载能力、灵活性、控制精度高等特点,通过将驱动电机置于机架上,可以减轻机械爪自身的负载,降低重量和体积,使其更加紧凑和灵活,同时通过将驱动电机置于机架上,机械爪的负载能力可以显著提高,因为机械爪本身不再需要承受驱动电机的重量,解决了现有传统承载机构通常将驱动电机集成在机械爪本身,导致机械爪的重量和体积增加,限制了机械爪的灵活性和适应性,使其难以在狭小的工作空间中进行操作等缺点,同时降低了传统承载机构操作的风险和维护的难度。
23、(2)本发明完全解耦高承载三自由度平面机器人,具有平面两移动一转动的三个自由度,控制一个驱动副对应实现动平台的一个自由度,不受其他支链的影响;本机构主要执行机构采用螺旋副,运动单元的移动转化为执行机构的转动,减少误差,提高稳定性。
24、(3)本发明完全解耦高承载三自由度平面机器人,是一种用于工业机器人和自动化系统的机械结构,它能够实现对物体的抓取、操纵和放置。该机构由两个运动单元组成,每个运动单元由三个支链并联组成,共有六条支链,支链并联使得机构的承载能力得到提高,整体结构刚度较大。
本文地址:https://www.jishuxx.com/zhuanli/20240914/296979.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表