-
高精度惯性导航仪的制作方法
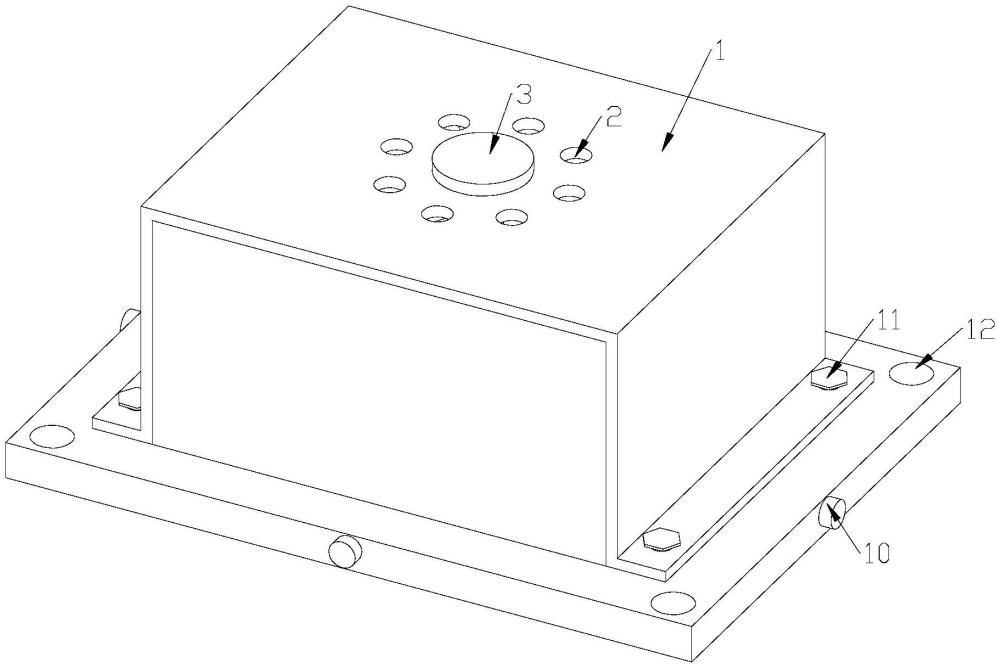
本申请涉及导航,尤其涉及一种高精度惯性导航仪。背景技术:1、惯性导航仪是一种能够实现定位导航功能的器件,被广泛应用于航空航天、军工、汽车等领域中。惯性导航仪主要依赖微机电系统(micro-electr......
-
一种机器人的惯性定位方法及系统
本发明涉及机器人定位领域,具体涉及一种机器人的惯性定位方法及系统。背景技术:1、随着机器人技术的发展,可以行走的机器人由于其优越的地形适应能力和灵活性,越来越受到关注和应用,而其中,腿式机器人对定位精......
-
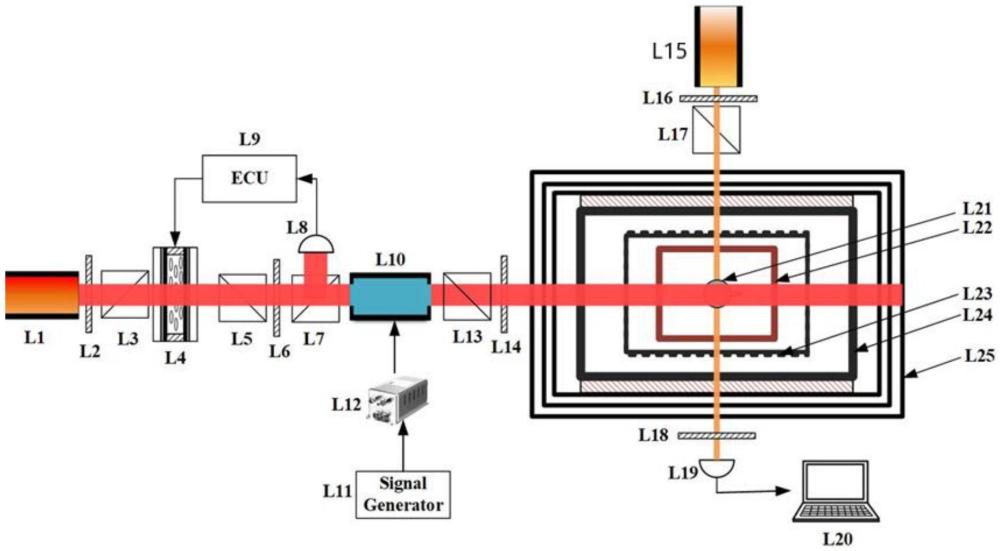
一种SERF惯性测量装置横向极化率在线测量方法
本发明涉及serf惯性测量装置极化率在线测量,特别是一种serf惯性测量装置横向极化率在线测量方法,通过在抽运光路模块中设置电光调制器(eom)实现抽运光脉冲调制反转电子自旋,从而进行电子极化率测量。......
-
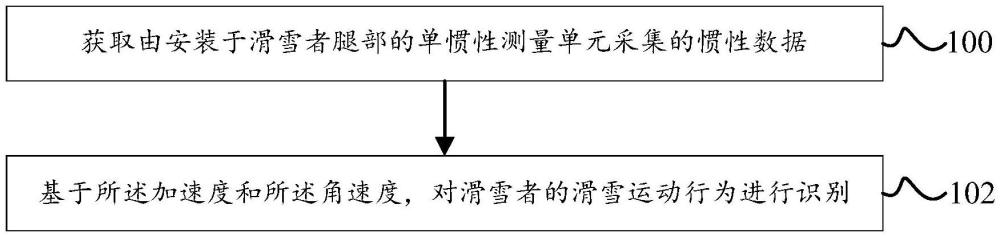
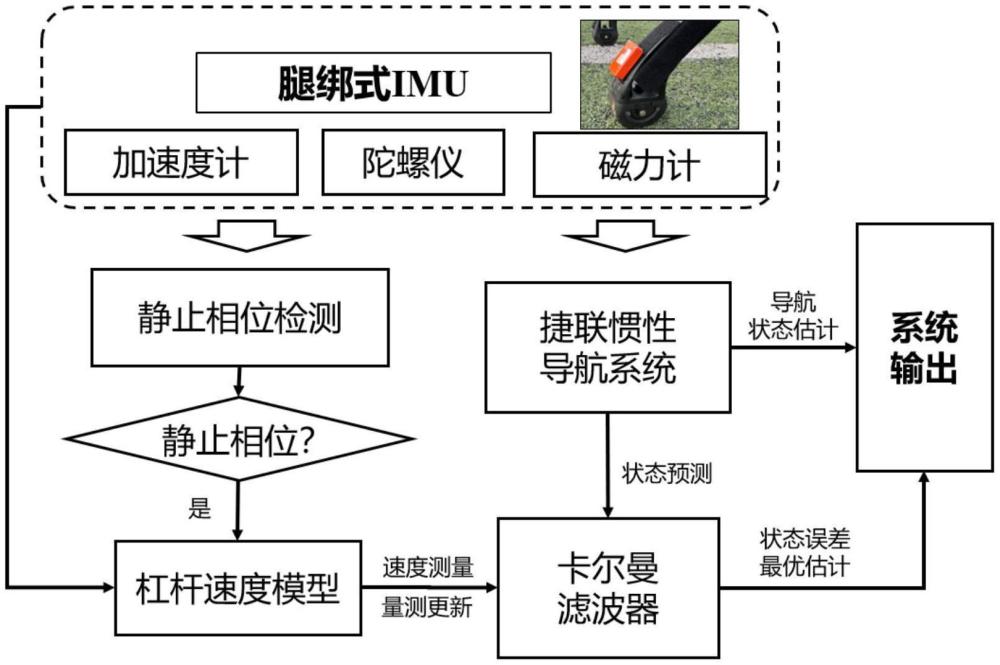
基于单惯性测量单元的滑雪运动行为识别方法和装置
本发明涉及行为识别,尤其涉及一种基于单惯性测量单元的滑雪运动行为识别方法和装置。背景技术:1、滑雪运动是一项高速且技巧性很强的运动,极易发生摔倒或碰撞他人事件,从而引发伤害。因此,对于滑雪运动中技术动......
-
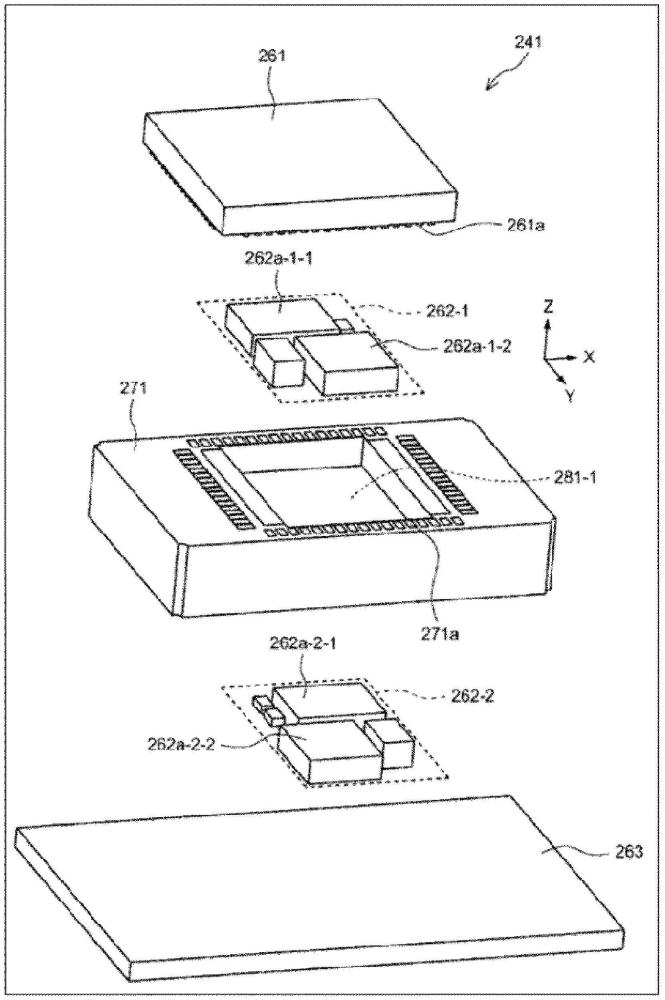
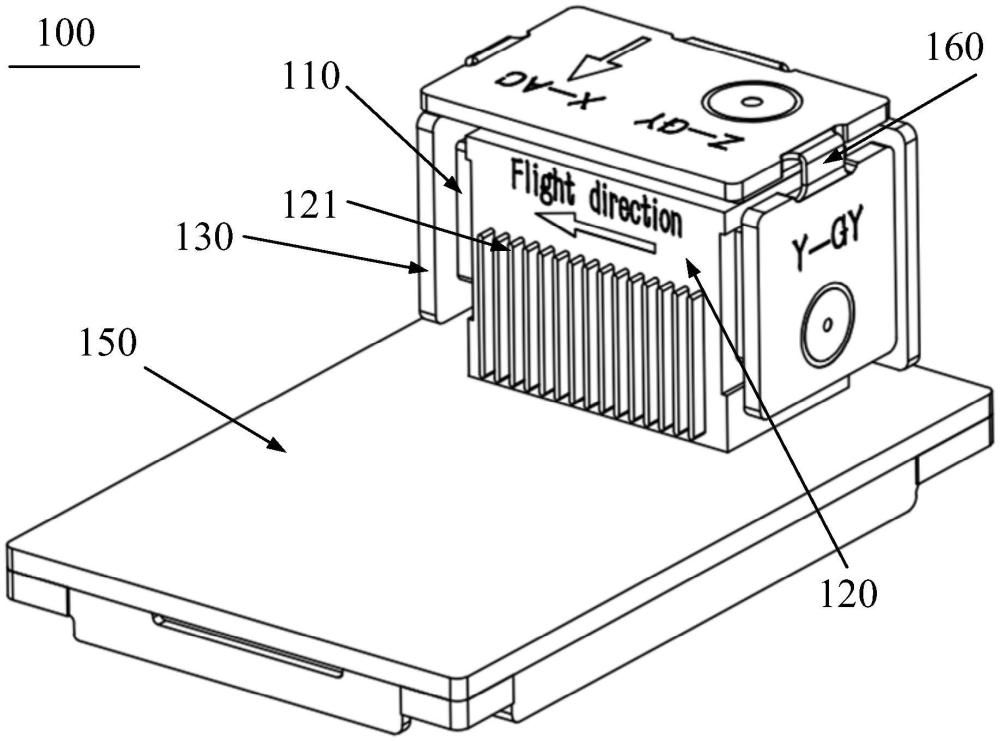
惯性测量装置的制作方法
本公开内容涉及惯性测量装置,并且更具体地涉及能够减少由于温度变化而导致的测量准确度的降低的惯性测量装置。背景技术:1、已经提出了以下技术:惯性测量单元(imu:inertial measurement......
-
一种光纤惯性自主导航测量装备的制作方法
本发明涉及水下潜水器导航定位,尤其涉及一种光纤惯性自主导航测量装备。背景技术:1、现有潜水器导航定位方式有如下几种:(一)水下声学定位,水下声学定位与导航作用距离有限,安装维护成本较高,且易受人为或自......
-
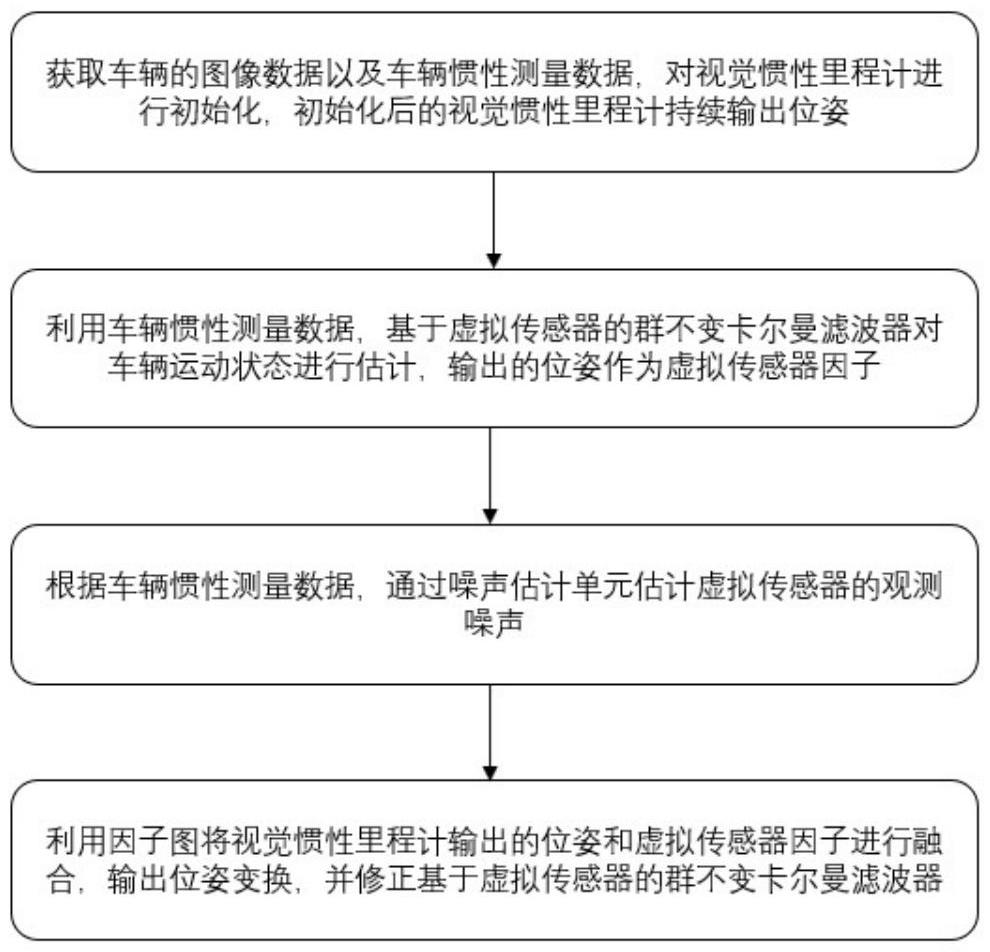
利用车辆运动规律提高视觉惯性里程计鲁棒性的方法及系统
本发明属于自动驾驶车辆,特别涉及利用车辆运动规律提高视觉惯性里程计鲁棒性的方法及系统。背景技术:1、在gps信号拒止环境下,基于机器人本体传感器的定位导航是实现智能机器人自主运动能力的关键技术。根据传......
-
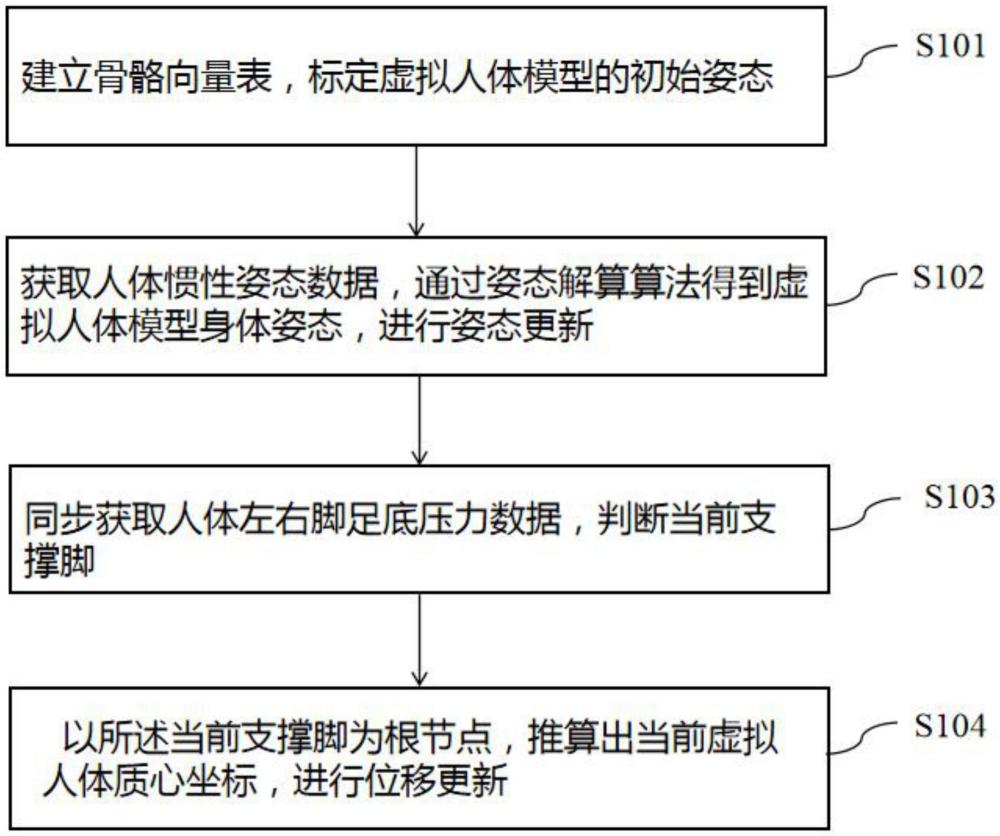
一种基于足底压力与惯性融合的动作捕捉方法、系统、计算机设备及存储介质
本发明涉及计算机,更具体地说,涉及一种基于足底压力与惯性融合的动作捕捉方法、系统、计算机设备及存储介质。背景技术:1、动作捕捉是跟踪并重建人体的空间姿态,是在身体各节段的表面设置跟踪器,计算机接收来自......
-
一种动态可调的惯性负载装置及其使用方法与流程
本发明涉及机电伺服控制,尤其涉及一种动态可调的惯性负载装置及其使用方法。背景技术:1、在机电伺服系统领域,为了评估系统的性能和稳定性,通常需要进行惯性负载测试。传统惯性负载测试主要采用静态负载装置,该......
-
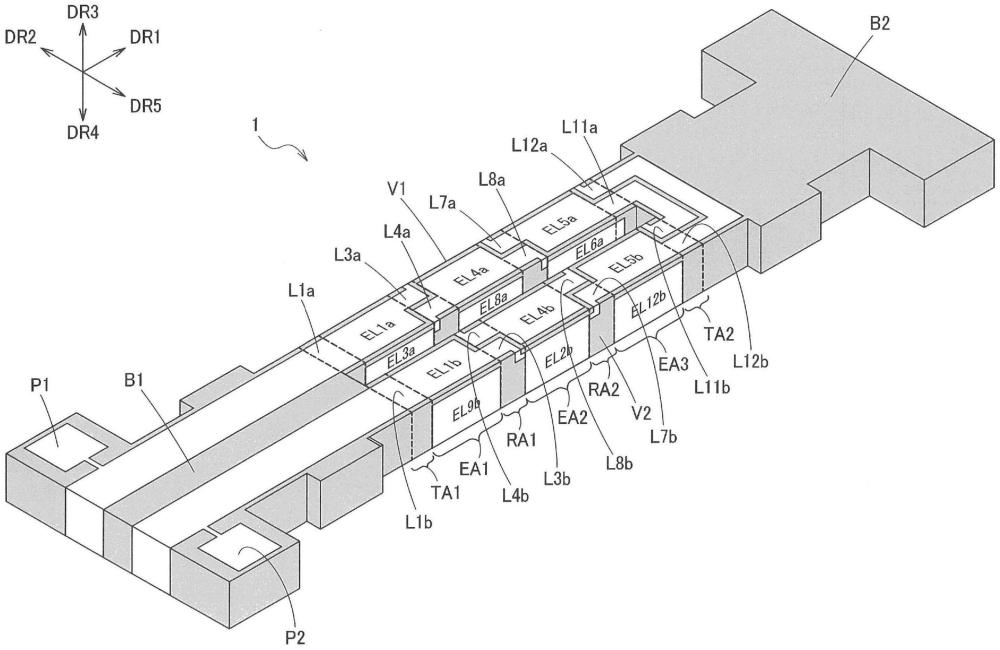
双音叉振子、物理量传感器及惯性计测装置的制作方法
本发明涉及双音叉振子、物理量传感器及惯性计测装置等。背景技术:1、在专利文献1中公开了这样的双音叉振子,具备:一对基部;两条振动梁,相互平行地配置在一对基部之间,分别具有表面、背面、两个侧面;以及多个......
-
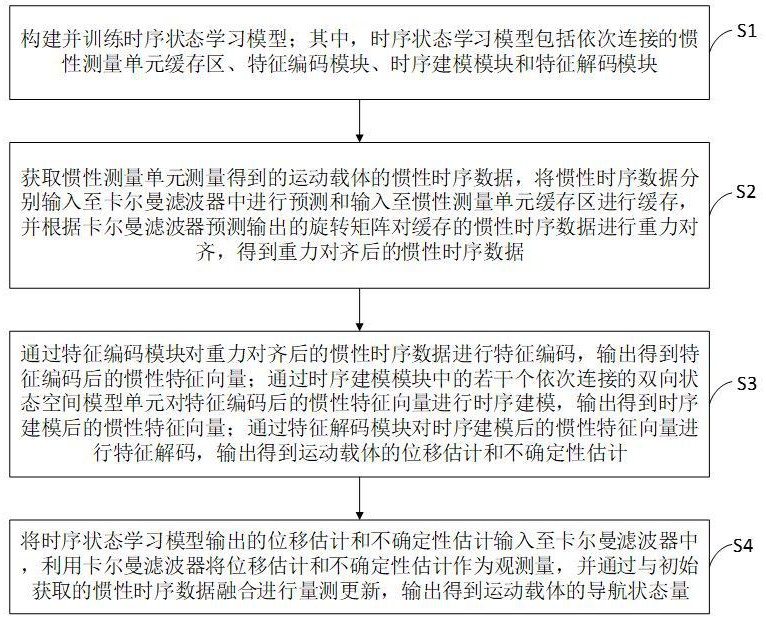
基于时序状态学习模型的惯性导航方法、装置及设备
本技术涉及惯性导航,特别是涉及一种基于时序状态学习模型的惯性导航方法、装置及设备。背景技术:1、行人导航在应急救援、商超购物和增强现实等应用场景下有着重要的支撑作用。随着微惯性传感器技术的不断发展,微......
-
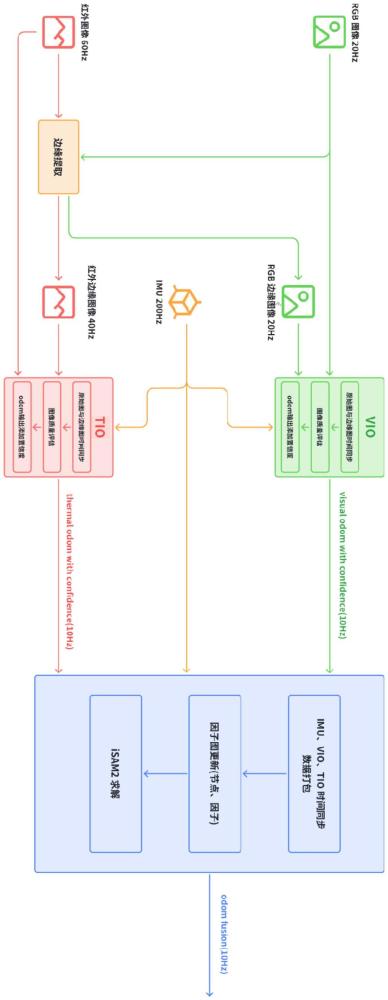
一种视觉-红外-惯性融合定位与建图方法
本发明属于即时定位与地图构建,具体涉及一种视觉-红外-惯性融合定位与建图方法。背景技术:1、随着机器人技术的迅速发展,自主机器人在工业制造、军事行动、民用生活中得到了广泛的应用,尤其在危险环境中具有广......
-
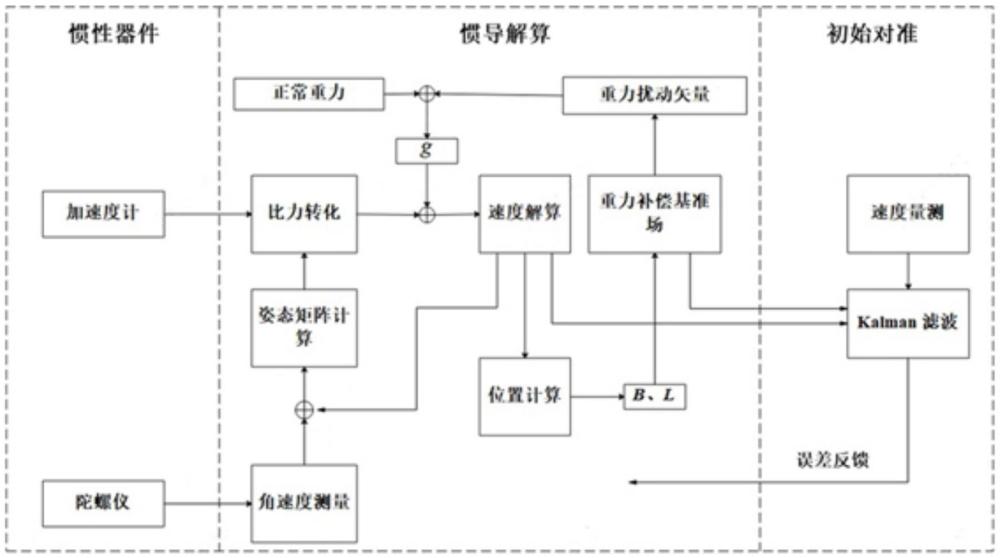
一种高精度惯性导航系统的重力扰动补偿方法
本发明涉及数据测绘的,尤其涉及一种高精度惯性导航系统的重力扰动补偿方法。背景技术:1、惯性导航系统(inertial navigation system,ins)不依赖任何外界信息,是一种自主式、隐蔽......
-
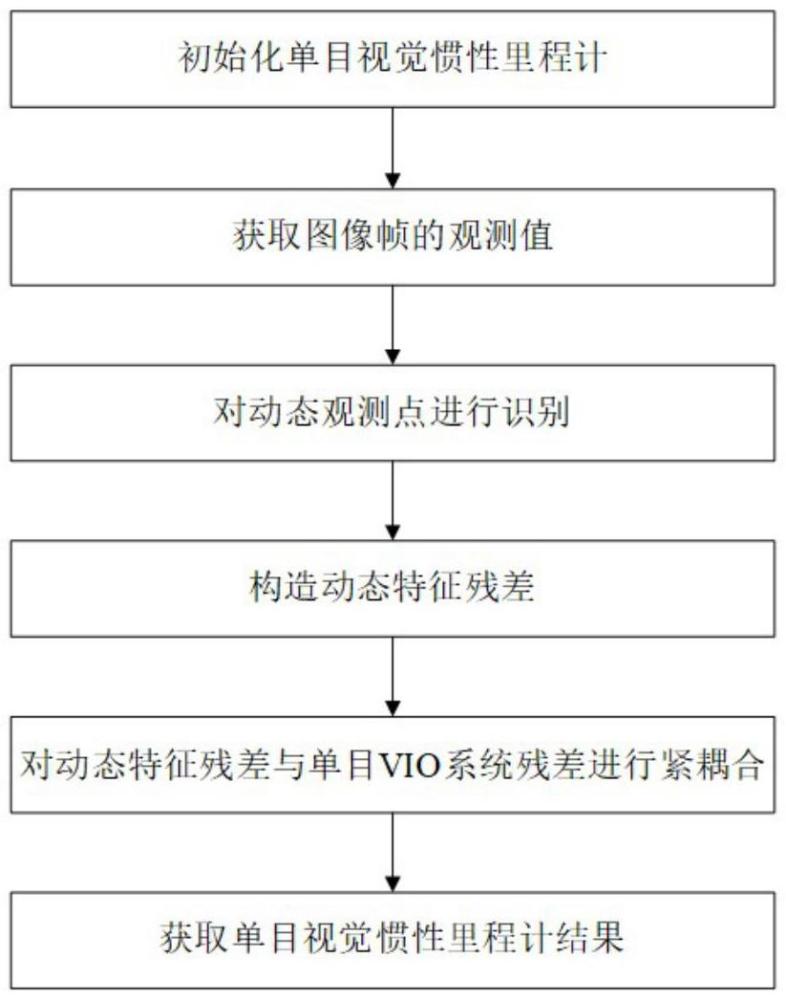
基于动态特征紧耦合的单目视觉惯性里程计方法
本发明属于slam领域,特别涉及一种基于动态特征融合的单目视觉惯性里程计方法,可用于复杂动态环境中无人机、汽车等运动平台的自主定位。背景技术:1、相比于传统的视觉或惯性导航系统,视觉惯性里程计在处理视......
-
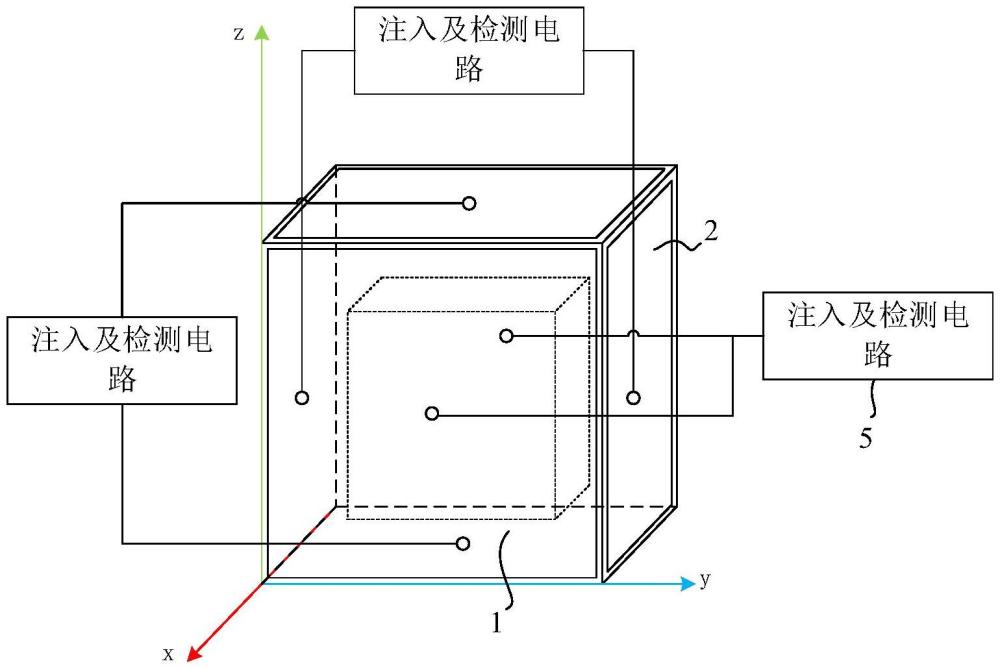
一种惯性传感器探头装置及多自由度检测方法
本技术属于电容位移传感测试领域,更具体地,涉及一种惯性传感器探头装置及多自由度检测方法。背景技术:1、天琴计划是我国独立提出的一个空间引力波探测计划。基于电容位移传感和静电反馈控制技术的空间惯性传感器......
-

一种地理矢量图与SAR图像匹配辅助惯性导航方法
本发明属于飞行器组合导航,具体涉及一种地理矢量图与sar图像匹配辅助惯性导航方法。背景技术:1、自主、高精度导航是长航时无人飞行器的核心技术。惯性导航系统是飞行器自主导航的核心系统,是导航精度的决定者......
-
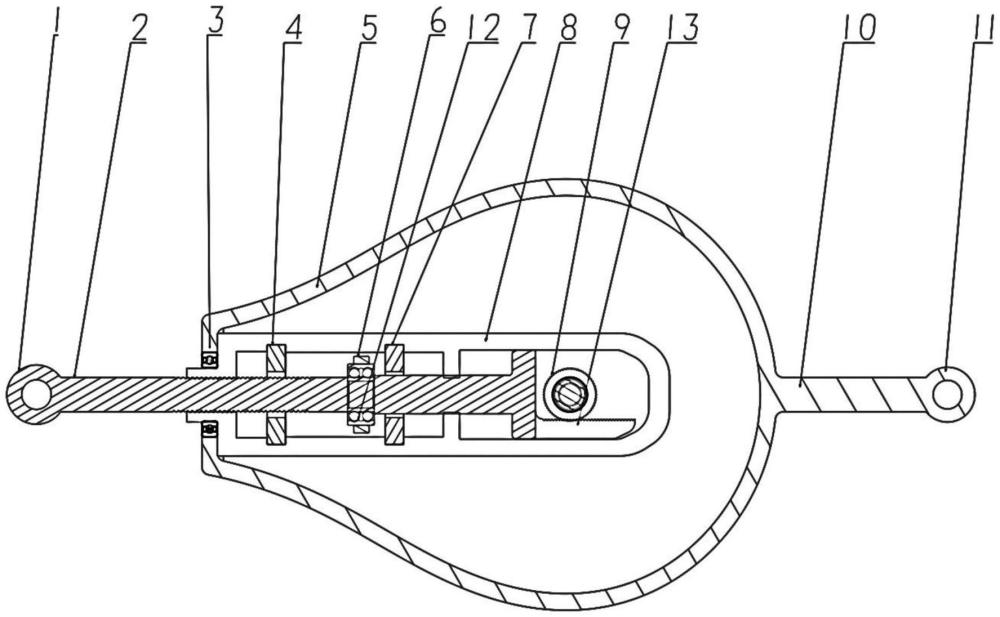
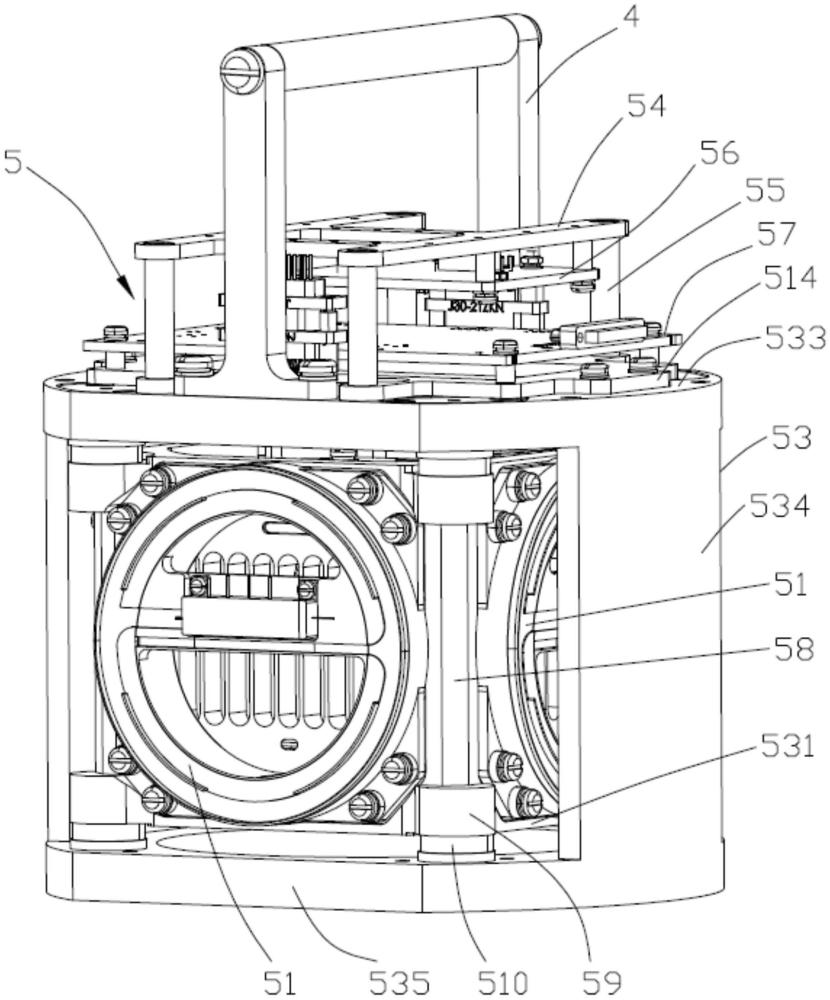
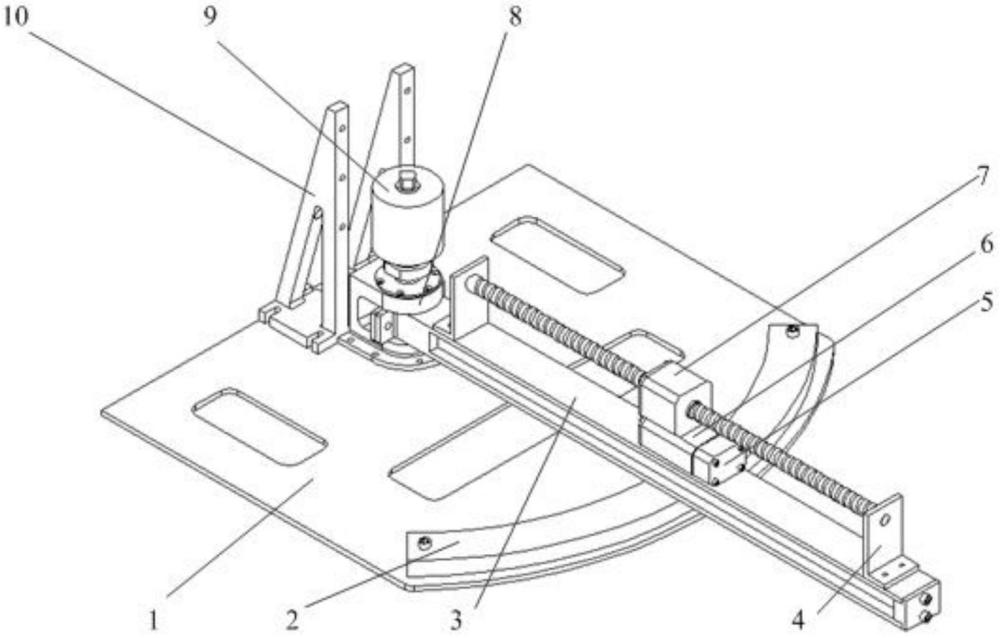
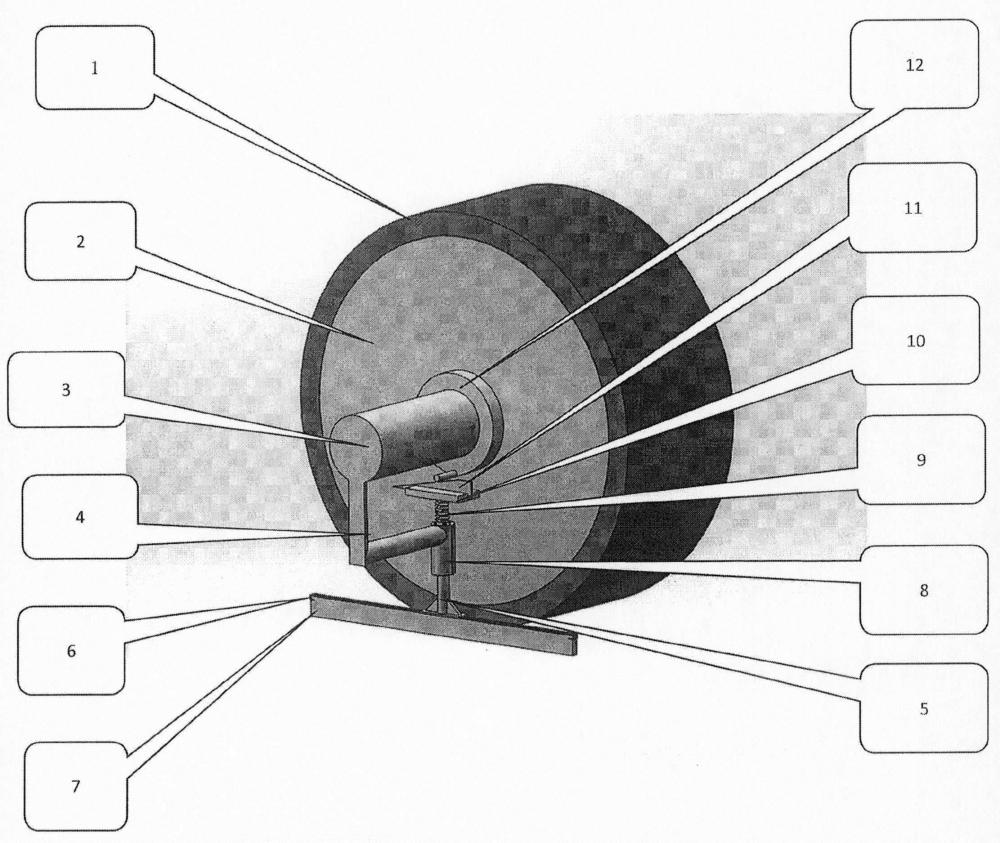
一种惯容阻尼可变的磁石丝杆式惯性与阻尼设备
本发明涉及应用阻尼力吸振的力控制设备,特别是一种惯容阻尼可变的磁石丝杆式惯性与阻尼设备。背景技术:1、惯容器是两端元件,当作为动力吸振器等应用场合中的惯性元件使用时,其作用形式与单质量体有很大不同,不......
-
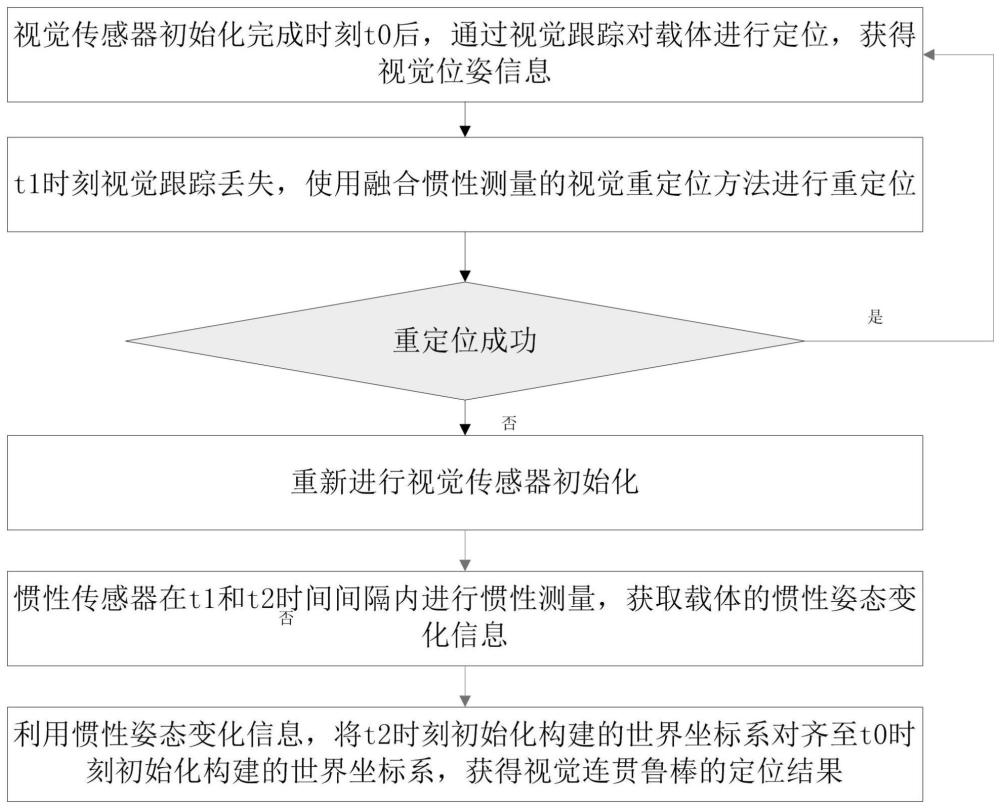
一种基于短期惯性测量的视觉连续定位方法与流程
本发明属于无人机视觉导航,具体涉及一种基于短期惯性测量的视觉连续定位方法。背景技术:1、随着视觉传感器技术、计算机技术和人工智能技术的迅速发展,计算机视觉领域中目标识别、视觉跟踪、视觉建图与视觉定位等......
-
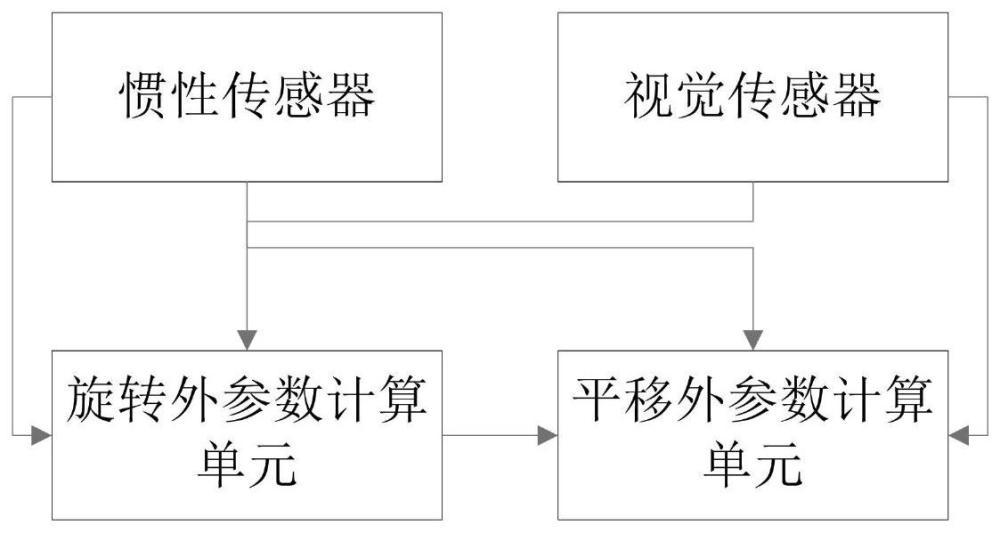
一种解耦合的惯性/视觉导航在线动态标定装置和方法与流程
本发明属于属于无人机惯性/视觉导航,涉及一种解耦合的惯性/视觉导航在线动态标定装置和方法。背景技术:1、视觉导航在纹理丰富的静态区域往往能实现良好的跟踪效果,达到较高的定位精度,但是在弱纹理、光照剧烈......
-
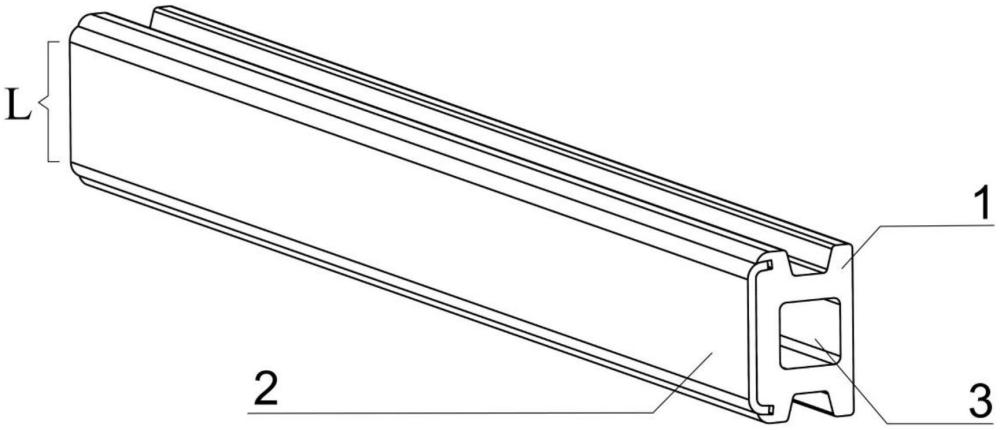
一种侧部授流高惯性矩复合轨的制作方法
本技术属于城市轨道交通供电设备,特别是涉及一种侧部授流高惯性矩复合轨。背景技术:1、目前中低速磁浮及跨座式单轨通常采用侧部授流方式,钢铝复合轨多采用中空型工字轨或c型轨。对于同侧布置四轨系统,当采用侧......
-
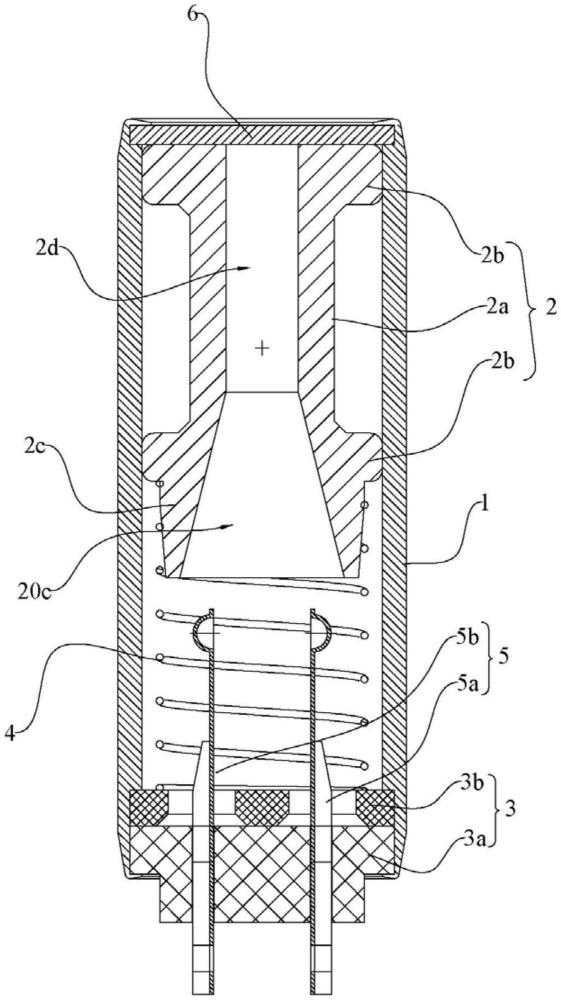
一种惯性闭合器的制作方法
本申请属于闭合装置,尤其涉及一种惯性闭合器。背景技术:1、现代战争中,导弹使用率大大提高,导弹种类层出不穷。惯性闭合装置是一种机械接电机构,已在导弹上成功应用。2、为满足导弹在特定条件下的功能要求,惯......
-
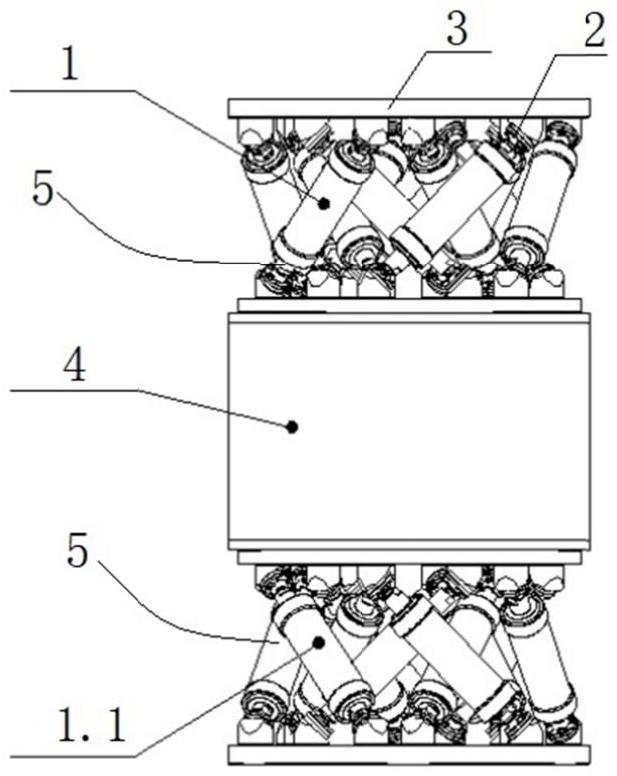
一种惯性导航设备用抗冲击隔离系统的制作方法
本技术涉及抗冲击隔离设备,具体涉及一种惯性导航设备用抗冲击隔离系统。背景技术:1、惯性导航是利用陀螺仪和加速度计这两种惯性敏感器,通过测量船舶加速度和角速度而实现的自主式导航方法。为满足超高精度、超长......
-
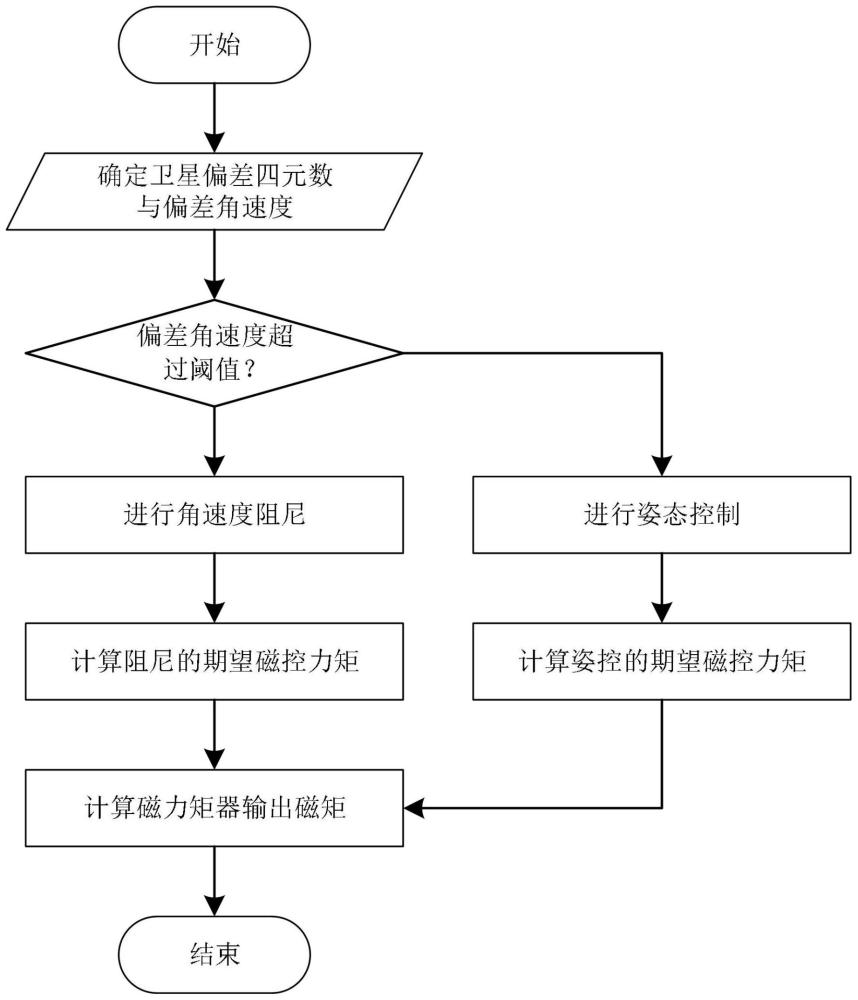
一种使用磁控的单轴惯性空间定向姿态控制方法与流程
本发明涉及航天器姿态控制,特别涉及一种使用磁控的单轴惯性空间定向姿态控制方法。背景技术:1、相比于反作用飞轮、控制力矩陀螺或者推进系统,而磁力矩器具有质量轻、功耗低和结构简单等特点,适用于某些对于姿态......
-
一种利用飞机着陆惯性冲力的刹车系统的制作方法
本申请涉及飞机刹车控制领域,尤其涉及一种利用飞机着陆惯性冲力的刹车系统。背景技术:1、飞机刹车系统主要作用是在飞机着陆后缩短滑跑距离,尽快使飞机停止。如何降低飞机在跑道上的滑跑距离,如何增加滑跑的阻力......
-
无人机的惯性导航安装结构的制作方法
本技术涉及无人机,特别涉及一种无人机的惯性导航安装结构。背景技术:1、惯性导航设备是一种不依赖于外部信息,也不向外部辐射能量的自主式导航设备,其基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参......
技术新讯 > 惯性 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01