-
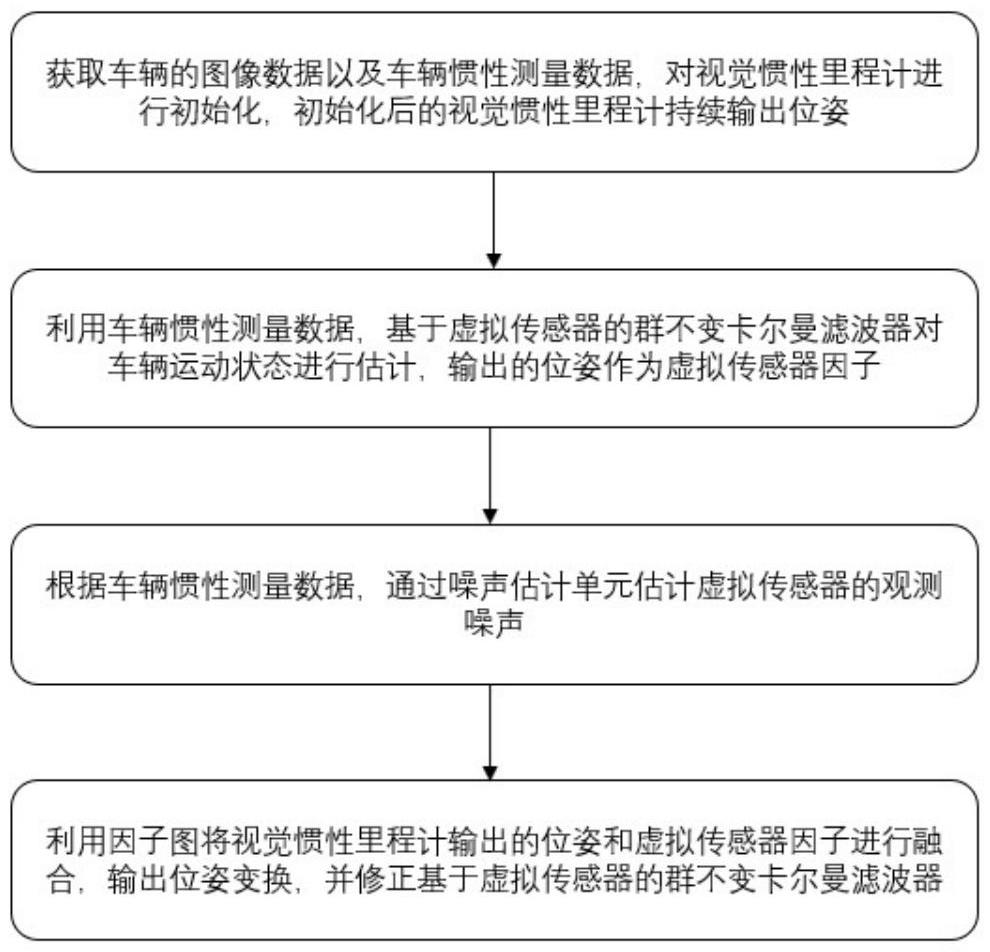
利用车辆运动规律提高视觉惯性里程计鲁棒性的方法及系统
本发明属于自动驾驶车辆,特别涉及利用车辆运动规律提高视觉惯性里程计鲁棒性的方法及系统。背景技术:1、在gps信号拒止环境下,基于机器人本体传感器的定位导航是实现智能机器人自主运动能力的关键技术。根据传......
-
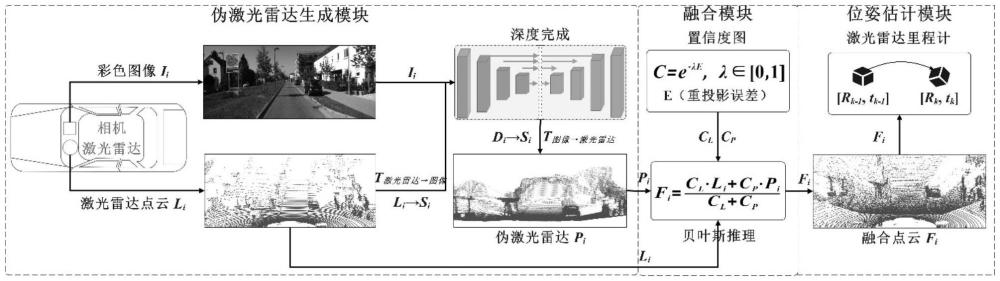
基于激光雷达和相机融合的增强型里程计方法
本发明属于自动驾驶,具体涉及一种基于激光雷达和相机融合的增强型里程计方法。背景技术:1、自动驾驶汽车集成了环境感知、无线通信、智能计算等功能,为用户提供了优质的服务和便捷的出行体验。移动定位作为自动驾......
-
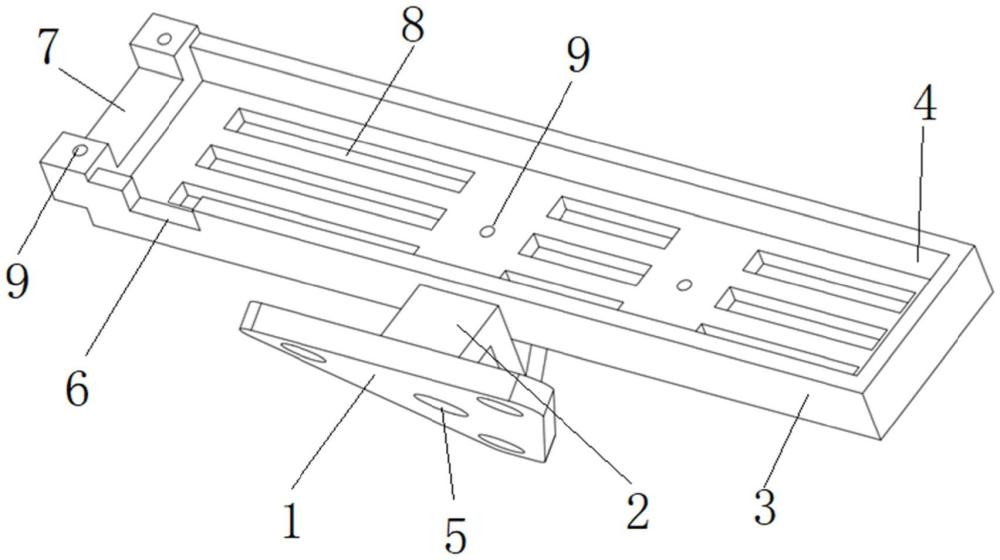
一种应用于特种机器人的轻型易安装视觉惯性里程计的制作方法
本技术涉及特种机器人的领域,尤其是涉及一种应用于特种机器人的轻型易安装视觉惯性里程计。背景技术:1、intel realsense t265是一款经典实用的视觉定位模块,旨在为移动机器人和无人机等特种......
-
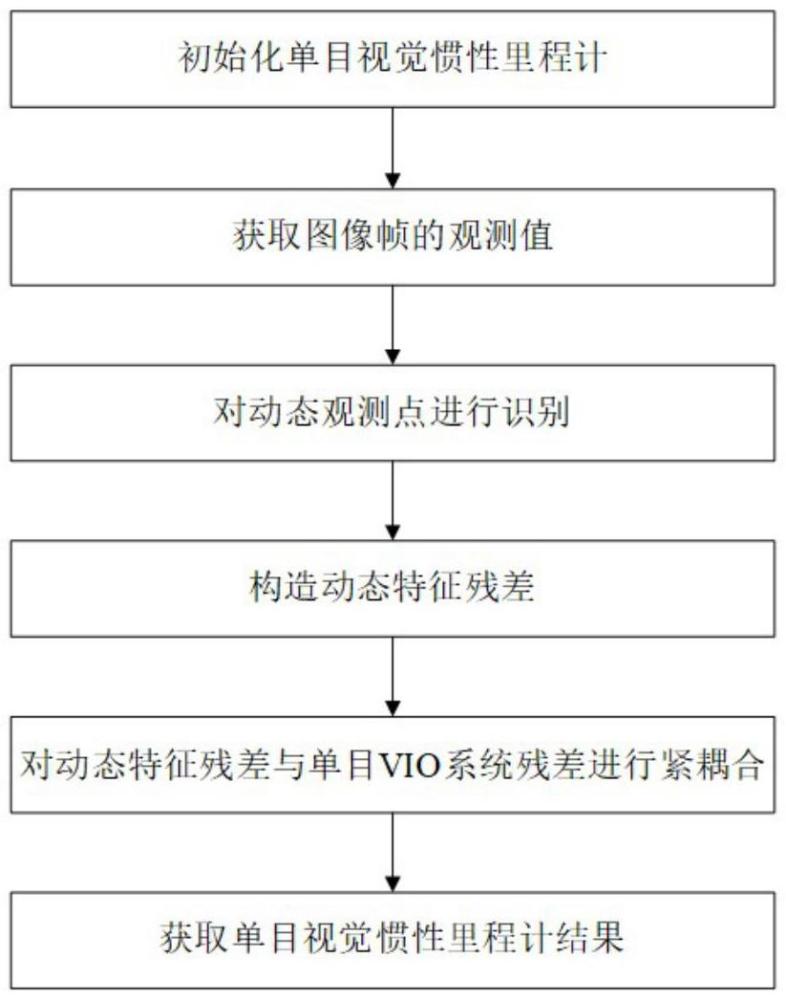
基于动态特征紧耦合的单目视觉惯性里程计方法
本发明属于slam领域,特别涉及一种基于动态特征融合的单目视觉惯性里程计方法,可用于复杂动态环境中无人机、汽车等运动平台的自主定位。背景技术:1、相比于传统的视觉或惯性导航系统,视觉惯性里程计在处理视......
-
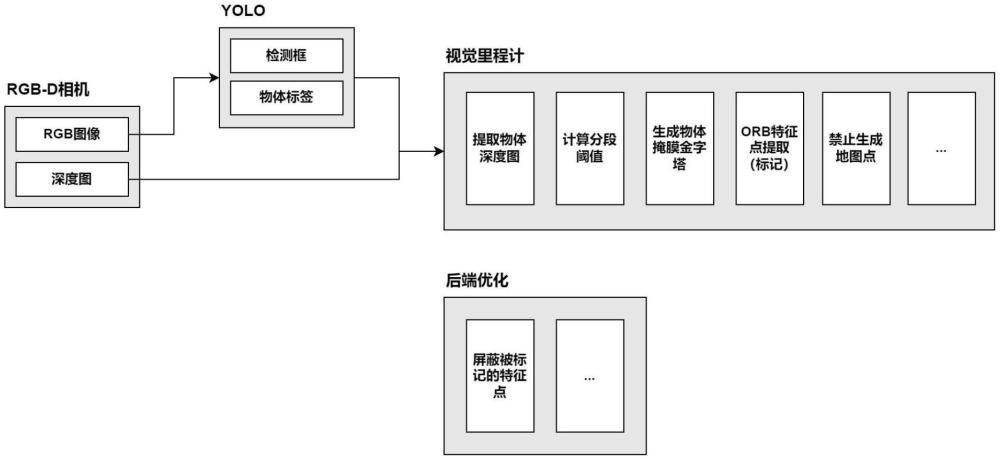
一种图像处理方法、装置及机器人视觉里程计
本发明涉及计算机视觉,具体涉及一种图像处理方法、装置及机器人视觉里程计。背景技术:1、机器人视觉slam系统在动态环境中保持健壮性是一个挑战,虽然现在slam系统在特定情况下得到了成功的演示,但系统对......
-
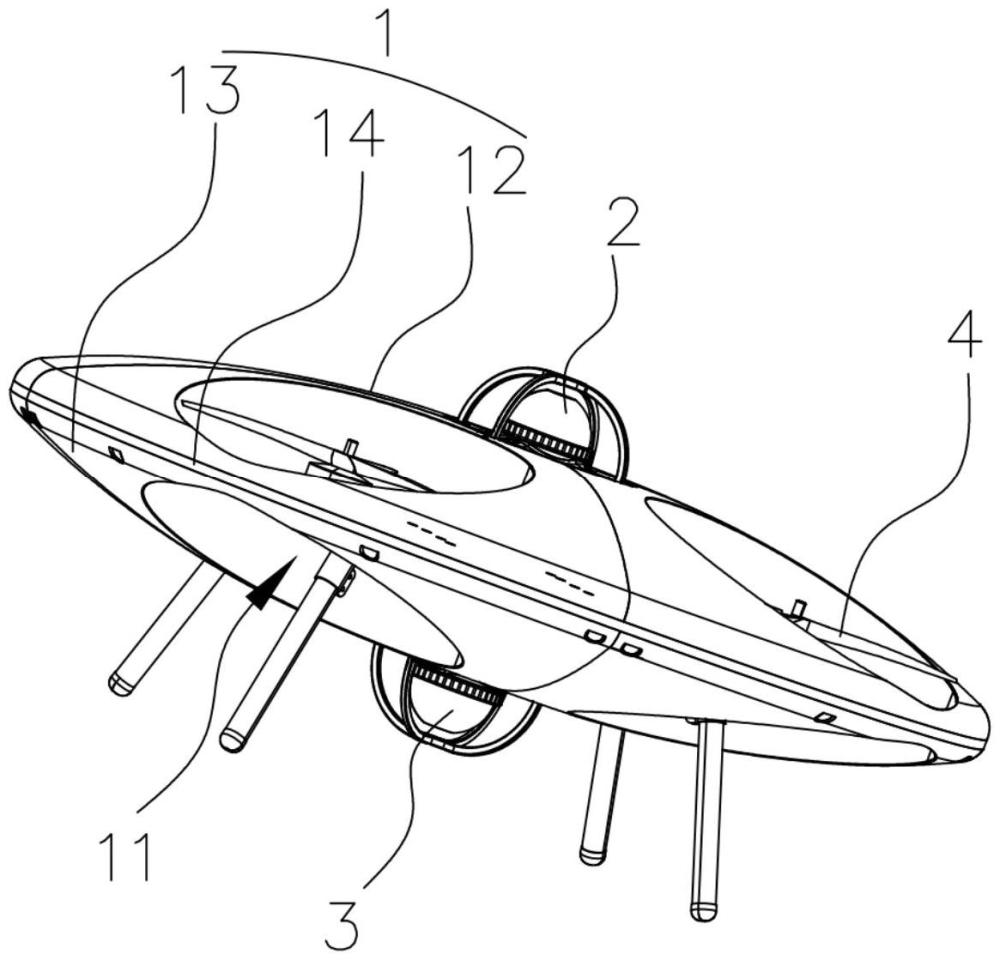
一种双雷达全空间避障的无人机及双雷达里程计构建方法与流程
本技术涉及无人机领域,特别涉及一种双雷达全空间避障的无人机及双雷达里程计构建方法。背景技术:1、传统的以激光雷达作为主要感知设备服务于无人机进行定位与建图的方案常以单个激光雷达为主,主要分为传统机械式......
-
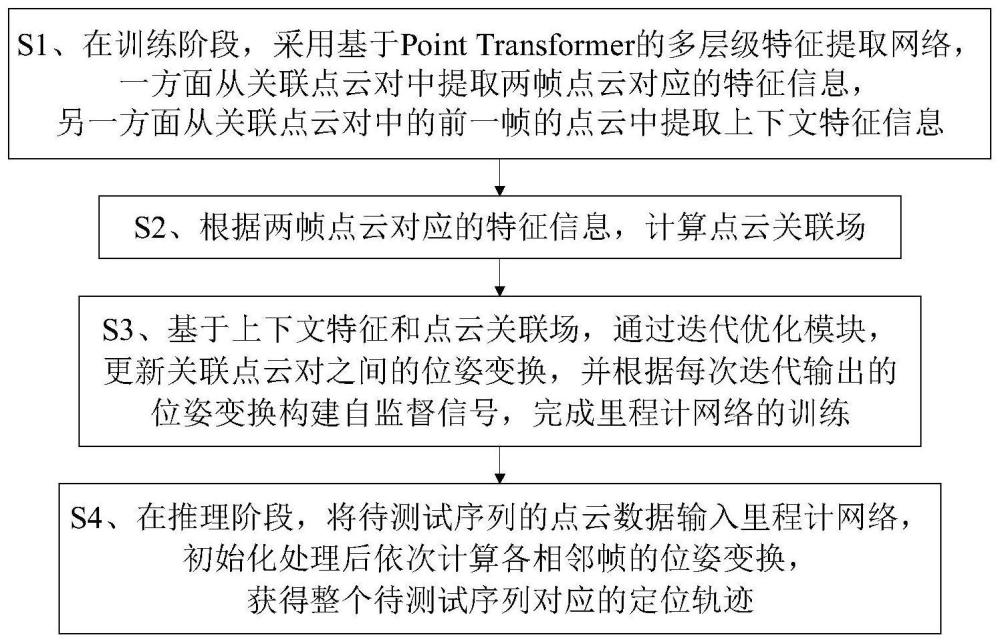
一种用于自动驾驶车辆的4D毫米波雷达自监督里程计方法
本发明涉及自动驾驶,尤其是涉及一种用于自动驾驶车辆的4d毫米波雷达自监督里程计方法。背景技术:1、根据传感器采集的时间序列数据进行自我运动估计,也称为里程计,是智能车辆实现自主定位的核心模块之一,能够......
-
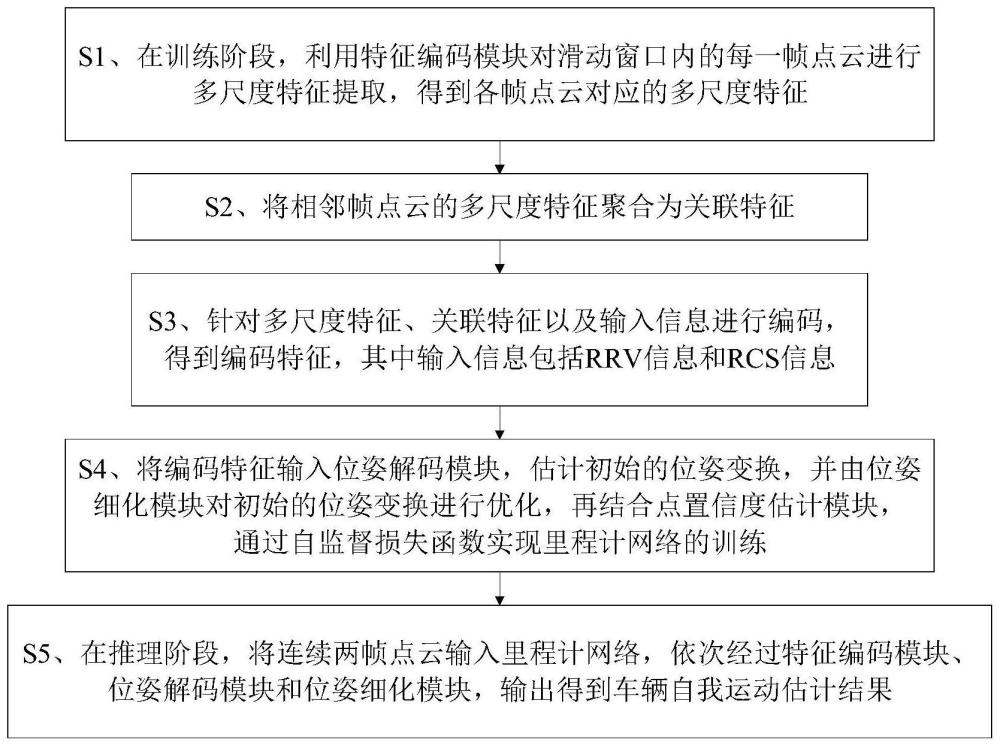
一种耦合深度学习与物理优化的4D毫米波雷达自监督里程计方法
本发明涉及自动驾驶,尤其是涉及一种耦合深度学习与物理优化的4d毫米波雷达自监督里程计方法。背景技术:1、根据传感器采集的时间序列数据进行相对运动估计,是自动驾驶车辆实现定位的关键模块,也称为里程计,它......
-
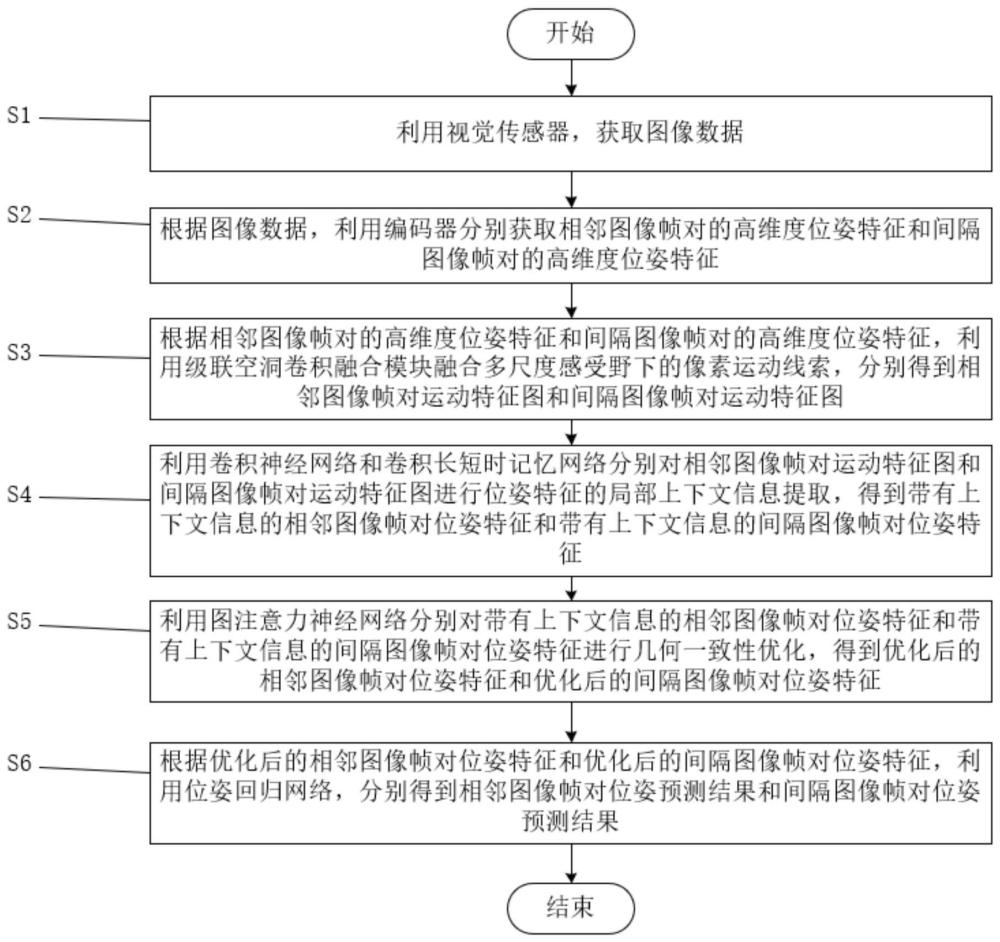
基于图优化几何一致性约束的视觉里程计位姿优化方法
本发明属于视觉里程计位姿优化领域,尤其涉及一种基于图优化几何一致性约束的视觉里程计位姿优化方法。背景技术:1、近年来,随着物联网相关应用的迅速发展,带动了基于位置的服务(lbs)的需求飞涨,这使得对场......
-
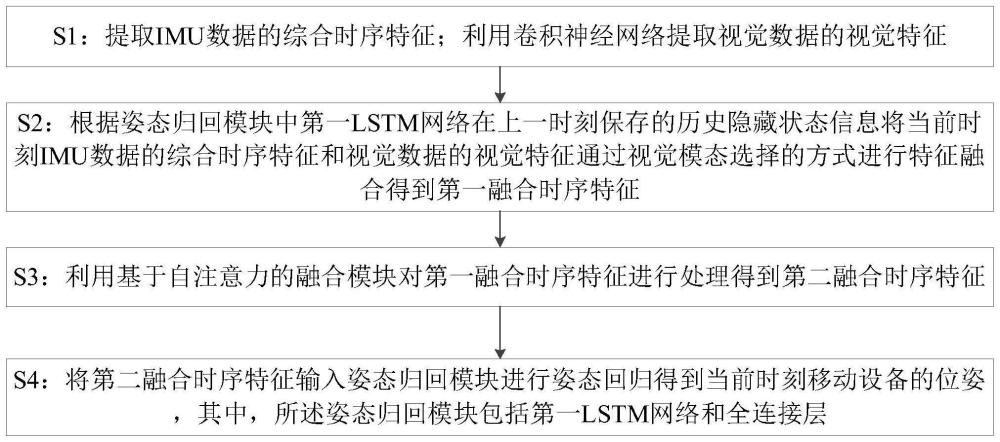
基于自注意力的视觉惯性里程计三维场景定位方法和装置
本发明属于三维场景定位,特别是涉及一种基于自注意力的视觉惯性里程计三维场景定位方法和装置。背景技术:1、目前视觉惯性里程计方法主要分为两种方法,第一种是基于传统的视觉惯性里程计方法,其依赖人工设计的特......
技术新讯 > 里程计 > 列表
 2024-11-06
2024-11-06精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
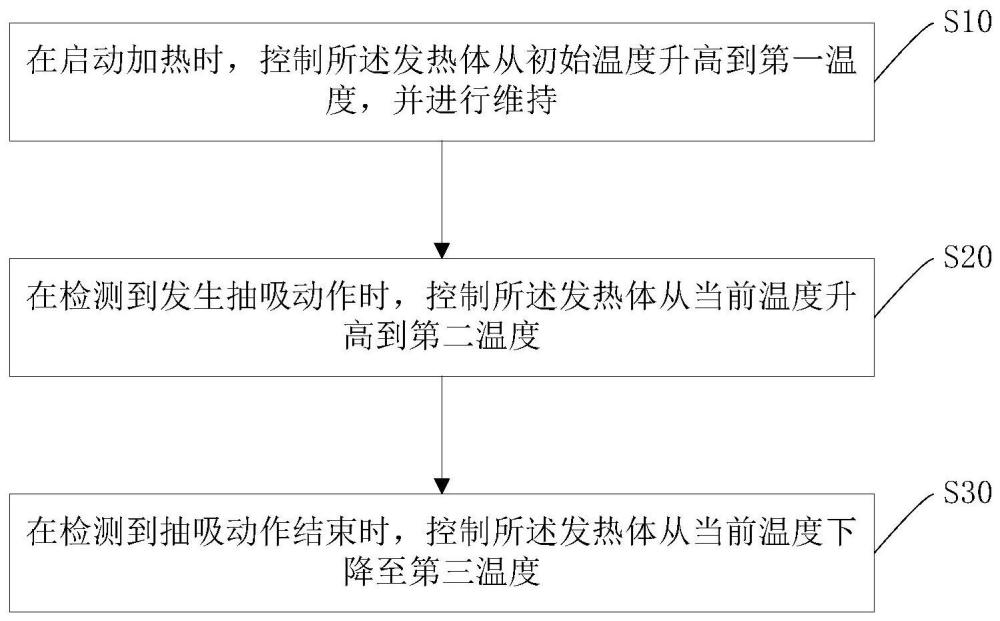
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19