一种应用于特种机器人的轻型易安装视觉惯性里程计的制作方法
- 国知局
- 2024-09-19 14:38:54
本技术涉及特种机器人的领域,尤其是涉及一种应用于特种机器人的轻型易安装视觉惯性里程计。
背景技术:
1、intel realsense t265是一款经典实用的视觉定位模块,旨在为移动机器人和无人机等特种机器人自主导航应用提供精确的定位和导航能力。intel realsense t265的构型与尺寸,其主要由金属外壳、玻璃护屏以及双鱼眼镜头三部分组成,总质量约为55g,且其安装方式一般为背后螺栓固接,这对于负载能力有限的小型机器人或无人机而言有一定负载压力。
技术实现思路
1、本实用新型的目的是:提供一套便于安装且质量较轻的视觉惯性系统。
2、为了达到上述目的,本实用新型的技术方案提供了一种应用于特种机器人的轻型易安装视觉惯性里程计,包括可安装于机器人上的安装结构、可装设视觉定位模块的主体结构、以及连接所述安装结构和所述主体结构的承接结构。
3、优选的,所述安装结构上设有安装孔。
4、优选的,所述主体结构设有用于装设所述视觉定位模块的安装槽。
5、优选的,所述安装槽的底部和/或侧壁设有用于固定所述视觉定位模块的固定孔。
6、优选的,所述安装槽的底部设有减重槽。
7、优选的,所述减重槽呈长条状,且设为多个。
8、优选的,所述安装槽的侧壁设有辅助安装所述视觉定位模块的卡位槽。
9、优选的,所述安装槽的另一侧壁设有转接线安置槽。
10、优选的,可采用胶接或固接两种方式进行连接。
11、综上所述,本实用新型包括以下有益技术效果:
12、本实用新型在吸取现有intel realsense t265质量较重以及安装较难的缺点后,进行针对intel realsense t265的一体式安装外壳设计,实现了相对原产品减重40%、且可直接胶接的效果。
13、本实用新型适用于负重能力有限的机器人或无人机等特种机器人上并估算其3d姿态以及相对于初始位置的机体移动速度。针对intel realsense t265设计一体式安装外壳,相较原产品质量减轻50%,可采用胶接或固接两种方式进行连接。
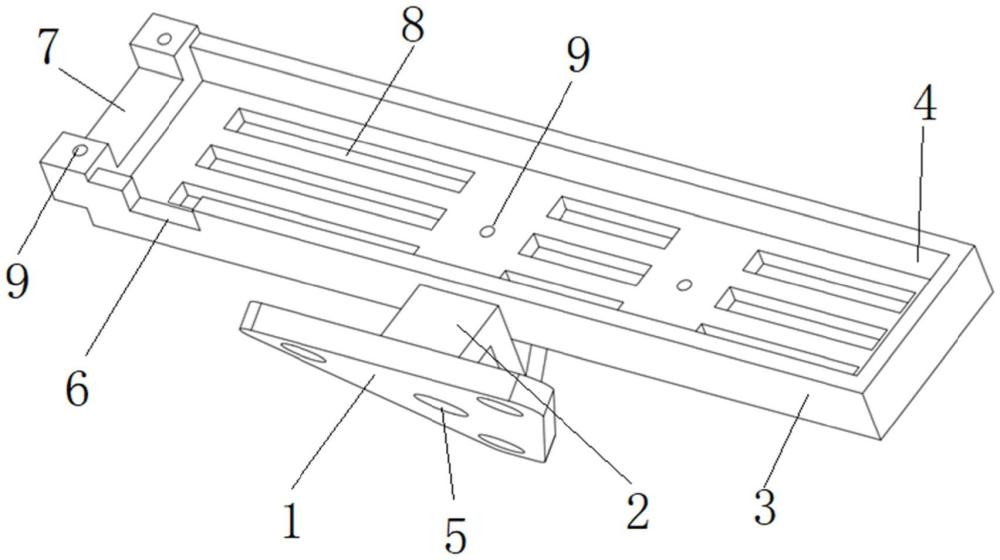
技术特征:1.一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,包括可安装于机器人上的安装结构(1)、可装设视觉定位模块的主体结构(3)、以及连接所述安装结构(1)和所述主体结构(3)的承接结构(2)。
2.根据权利要求1所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述安装结构(1)上设有安装孔(5)。
3.根据权利要求1所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述主体结构(3)设有用于装设所述视觉定位模块的安装槽(4)。
4.根据权利要求3所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述安装槽(4)的底部和/或侧壁设有用于固定所述视觉定位模块的固定孔(9)。
5.根据权利要求3所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述安装槽(4)的底部设有减重槽(8)。
6.根据权利要求5所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述减重槽(8)呈长条状,且设为多个。
7.根据权利要求3所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述安装槽(4)的侧壁设有辅助安装所述视觉定位模块的卡位槽(7)。
8.根据权利要求7所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,所述安装槽(4)的另一侧壁设有转接线安置槽(6)。
9.根据权利要求1所述的一种应用于特种机器人的轻型易安装视觉惯性里程计,其特征在于,可采用胶接或固接两种方式进行连接。
技术总结本技术涉及一种应用于特种机器人的轻型易安装视觉惯性里程计,涉及特种机器人的领域,其包括可安装于机器人上的安装结构、可装设视觉定位模块的主体结构、以及连接安装结构和主体结构的承接结构。本技术适用于负重能力有限的机器人或无人机等特种机器人上并估算其3D姿态以及相对于初始位置的机体移动速度。针对Intel RealSense T265设计一体式安装外壳,相较原产品质量减轻50%,可采用胶接或固接两种方式进行连接。技术研发人员:陈庆诚受保护的技术使用者:上海市特种设备监督检验技术研究院技术研发日:20231107技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299369.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表