一种双雷达全空间避障的无人机及双雷达里程计构建方法与流程
- 国知局
- 2024-08-30 14:28:04
本技术涉及无人机领域,特别涉及一种双雷达全空间避障的无人机及双雷达里程计构建方法。
背景技术:
1、传统的以激光雷达作为主要感知设备服务于无人机进行定位与建图的方案常以单个激光雷达为主,主要分为传统机械式多线激光雷达与固态激光雷达两种形式。其中,机械式多线激光雷达由多个激光发射器与接收器组成,通过中心轴旋转的方式感知周围环境信息,通常具有360度横向感知的能力,但受限于激光发射的角度,难以在垂直方向实现较高的感知范围及较为稠密的点云数据,常常会导致其所构建出的激光里程计出现z轴约束不足而漂移的现象;
2、而固态激光雷达得益于其独特的点云采集方式常常可以实现相比于机械式多线激光雷达更高的采集频率及更丰富的垂直观测信息,但其感知范围小于机械式多线激光雷达,难以实现全向感知的目的。
3、因此,现有技术仍有待于改进。
技术实现思路
1、本技术的目的在于提供一种双雷达全空间避障的无人机及双雷达里程计构建方法,以解决现有固态激光雷达感知范围小,难以实现全向感知的问题。
2、为实现上述目的,本技术实施例第一方面提供了一种双雷达全空间避障的无人机,包括:
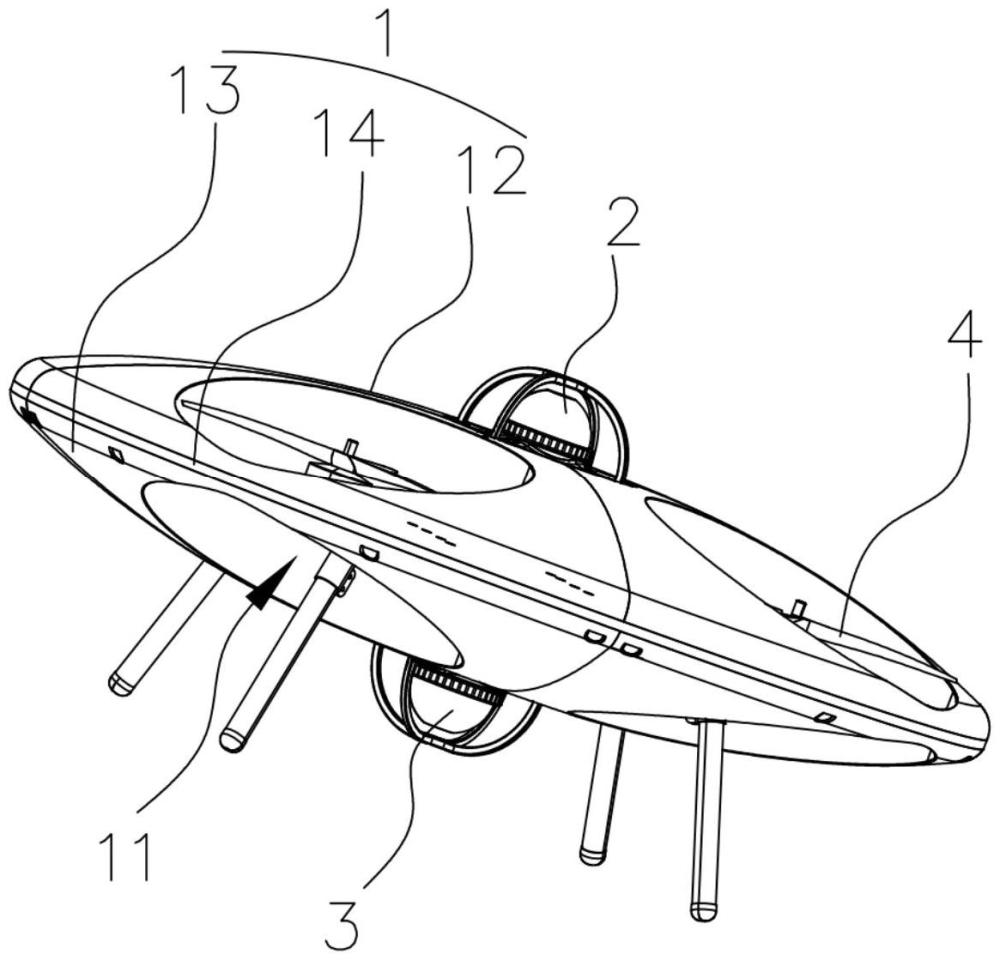
3、机身保护壳体,其呈椭圆状,以所述机身保护壳体位于竖直方向上的中部横截面为水平基准面,所述机身保护壳体的上表面的中部为最高处,所述机身保护壳体的下表面的中部为最低处,所述机身保护壳体的上表面和所述机身保护壳体的下表面之间贯穿开设有若干个螺旋桨涵道;
4、上激光雷达,其设置于所述机身保护壳体的上表面中部的上方;
5、下激光雷达,其设置于所述机身保护壳体的下表面中部的下方;
6、若干个螺旋桨,其分别转动设置于所对应的所述螺旋桨涵道内;
7、其中,所述上激光雷达和所述下激光雷达均为固态激光雷达。
8、根据以上所述的双雷达全空间避障的无人机,若干个所述螺旋桨涵道均匀分布于所述机身保护壳体上。
9、根据以上所述的双雷达全空间避障的无人机,所述机身保护壳体包括:
10、上保护壳体;
11、下保护壳体,其设置于所述上保护壳体的下方;
12、中间板,其设置于所述上保护壳体和下保护壳体之间,并分别与所述上保护壳体和下保护壳体连接;
13、其中,所述上保护壳体与所述下保护壳体相对所述中间板对称设置。
14、根据以上所述的双雷达全空间避障的无人机,所述无人机还包括:
15、第二紧固连接组件,其包括若干个第二螺母和第二螺栓,若干个所述第二螺母分布设置于所述上保护壳体形成的各个螺旋桨涵道的内壁上,所述第二螺栓依次穿过所述下保护壳体和所述中间板,并固定连接于所对应的所述第二螺母上;
16、其中,每个所述上保护壳体形成的每个螺旋桨涵道的内壁上设置有至少三个第二螺母。
17、根据以上所述的双雷达全空间避障的无人机,所述无人机还包括:
18、上位机,其设置于所述中间板的一侧上;
19、电源模块,其设置于所述中间板的另一侧上,且位于所述中间板的所述上位机和所述电源模块的重量均匀分布。
20、根据以上所述的双雷达全空间避障的无人机,所述中间板开设有第一安装槽和第二安装槽,所述上位机设置于所述第一安装槽内,且所述上位机的上表面和所述上位机的下表面相对所述中间板对称设置,所述电源模块设置于所述第二安装槽内,且所述电源模块的上表面和所述电源模块的下表面相对所述中间板对称设置。
21、根据以上所述的双雷达全空间避障的无人机,所述上保护壳体开设有安装缺口,所述安装缺口设置于所述电源模块的上方,并覆盖所述电源模块,所述无人机还包括电源仓盖,所述电源仓盖套设于所述安装缺口处。
22、根据以上所述的双雷达全空间避障的无人机,所述无人机还包括:
23、若干个上支撑柱,其设置于所述中间板和所述上激光雷达之间,并形成第一容纳腔,若干个所述上支撑柱的一端与所述中间板连接、另一端与所述上激光雷达连接;
24、下支撑柱,其设置于所述中间板和所述下激光雷达之间,并形成第二容纳腔,若干个所述下支撑柱的一端与所述中间板连接、另一端与所述下激光雷达连接;
25、飞行控制器,其设置于所述第一容纳腔内;
26、分电板组件,其设置于所述第二容纳腔内。
27、根据以上所述的双雷达全空间避障的无人机,所述上保护壳体的中部贯穿开设有第一安装口,所述下保护壳体的和中部贯穿开设有第二安装口,所述无人机还包括:
28、上激光雷达保护框,其套设于所述上激光雷达上,所述上激光雷达保护框的一端连接于所述上激光雷达上、另一端穿出所述第一安装口;
29、下激光雷达保护框,其套设于所述下激光雷达上,所述下激光雷达保护框的一端连接于所述下激光雷达上、另一端穿出所述第二安装口。
30、根据以上所述的双雷达全空间避障的无人机,所述无人机还包括:
31、若干个起落架主体,其设置于所述中间板位于所述螺旋桨涵道的下方;
32、若干个连接座,其一端与所述中间板连接、另一端与所对应的所述起落架主体连接;
33、若干个起落架缓冲层,其设置于所述起落架主体背离所述连接座的一端上;
34、第三紧固连接组件,所述连接座开设有安装孔,所述连接座位于所述安装孔的一侧开设有连接端槽,所述安装孔套设于所述起落架主体上,所述第三紧固连接组件穿过所述连接座位于所述连接端槽的一侧上,并固定于所述连接座位于所述连接端槽的另一侧上。
35、本技术实施例第二方面提供了一种双雷达里程计构建方法,其应用于如上所述的双雷达全空间避障的无人机,所述双雷达里程计构建方法包括:
36、获取惯性测量单元的角速度数据和加速度数据,并对角速度数据和加速度数据进行预积分处理,得到在imu时刻下的无人机的imu初始位姿信息;
37、获取上激光雷达的第一环境点云数据和下激光雷达的第二环境点云数据,基于雷达帧内的imu初始位姿信息,对当前雷达帧内的第一环境点云数据和第二环境点云数据进行运动畸变的补偿处理,并对补偿处理后的第一环境点云数据和第二环境点云数据进行数据下采样,得到预处理后的第一环境点云数据和第二环境点云数据;
38、计算预处理后的第一环境点云数据和第二环境点云数据的点云曲率信息,并基于点云曲率信息,从预处理后的第一环境点云数据和第二环境点云数据中提取几何平面特征点及几何边缘特征点,并基于入射角度信息,从第二环境点云数据中提取地面特征点;
39、将提取的几何平面特征点、几何边缘特征点、地面特征点与ikd-tree数据结构所存储的历史点云地图进行点到平面的icp算法配准处理,构建迭代误差状态卡尔曼滤波中的雷达观测残差方程;
40、基于imu初始位姿信息估算出雷达帧时刻下的初始位姿信息,并基于雷达帧时刻下的初始位姿信息构建迭代误差状态卡尔曼滤波中的运动残差方程;
41、基于运动残差方程与雷达观测残差方程进行基于迭代误差状态卡尔曼滤波的位姿优化过程,得到雷达帧时刻下的优化位姿信息;
42、基于雷达帧时刻下的优化位姿信息,将补偿处理后的第一环境点云数据与第二环境点云数据转换到世界坐标系下,并加入基于ikd-tree数据结构管理的历史点云地图当中,以提供给下一时刻点到平面的icp算法配准处理的过程中,并输出更新后的点云地图。
43、本技术提供的一种双雷达全空间避障的无人机及双雷达里程计构建方法的有益效果至少在于:
44、本技术在机身保护壳体的上表面和下表面分别安装了上激光雷达和下激光雷达,且上激光雷达和下激光雷达均采用固态激光雷达,可以预见的是,本技术通过双固态激光雷达的搭载设计充分考虑无人机平台低载荷的特点,利用固态激光雷达比机械式多线激光雷达更小、更轻的特点充分提高无人机的续航能力,并在获得更快数据采集速度的同时,将分别设置于呈椭圆状的机身保护壳体的最高处和最低处,以上激光雷达和下激光雷达无遮挡搭载的形式为无人机提供全方位的空间感知信息,使得其能够在飞行的过程中更加高效地规划路径,并且,相较于单个固态激光雷达在一些局部空间信息不足或受限(如空间垂直信息不足的大场景空地或横向空间感知受限的竖直管廊等)的场景下出现漂移现象的情况,该产品充分考虑到双雷达的信息互补优势,从不同的角度获取数据以补充彼此的视角盲区,且在执行任务的过程中,如果一个固态激光雷达发生故障或被遮挡,另一个固态激光雷达仍可以继续工作,以维持无人机正常的运行,充分提高了无人机系统的稳定性和容错性,并且,本技术将螺旋桨隐藏于机身保护壳体的螺旋桨涵道内,完美解决了螺旋桨或者其他部件遮挡上激光雷达和下激光雷达采集激光点云的情况。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282205.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表