用于无接触地检查鸡蛋的方法和装置与流程
- 国知局
- 2024-07-12 13:15:05
本发明涉及一种用于自动无接触地检查放置在处理线上的容器中的鸡蛋的方法。本发明还涉及一种用于实施此类检查方法的装置。
背景技术:
1、众所周知,在家禽养殖领域,特别是在小鸡生产领域,利用蛋的光学特性来区分它们,并在加工过程中绕过那些被认为不太可能孵化或产出小鸡的蛋。
2、后者本质上是未受精鸡蛋或卵细胞胚胎已经死亡或畸形的受精鸡蛋。
3、这种区分对于最小化在卵内处理期间(即在用疫苗针穿过蛋壳对鸡蛋进行注射期间)的疫苗损失是必要的,以促进鸡蛋在孵化之后的发育并且防止疾病的出现。这种区分对于避免臭鸡蛋的爆炸也是必要的,臭鸡蛋的爆炸可能会污染容器中活的周围鸡蛋以及可用于注射这些活鸡蛋的注射材料,这也将有污染这些活鸡蛋的风险。
4、注意,臭鸡蛋的爆炸也可能给鸡蛋区分中使用的光学防护屏上造成脏乱,与此相关的方法通常被称为“透光检查”。
5、当前,当某些鸡蛋保持照亮时,该脏乱可能对这些鸡蛋的状态的检测质量有害,或者在脏乱更严重的情况下,甚至会妨碍此类检测。因此,用于执行透光检查的机器(称为透光检查机)必须停止,以确保其清洁。
6、还观察到,这种透光检查方法对外部环境敏感,光源(诸如阳光或卤素灯)有可能扰乱在透光检查容纳在筐中的鸡蛋的步骤期间获得的测量结果。
7、该方法也对所测量的鸡蛋的脏乱状态敏感。
8、另外,此类透光检查方法仅允许低处理吞吐量。
9、此外,已知用于识别一批鸡蛋中倒立布置的鸡蛋的方法。
10、对处于倒立位置的鸡蛋进行此类检测是必要的,以确保注射器的针在疫苗或营养物的卵内注射期间保持朝向对应鸡蛋的气室定向,未能做到这一点会使得胚胎可能被损坏或甚至被杀死。
11、例如,现有技术中用于识别一批鸡蛋中倒立布置的鸡蛋的方法在于用辐射源加热该批鸡蛋。
12、然后在鸡蛋不再暴露于辐射源的同时对鸡蛋进行热成像,并且对如此捕获的热图像进行分析以检测热区的存在以及识别倒立布置或处于倒置位置的鸡蛋。
13、实际上,由于鸡蛋的气室用作隔热体,所以当倒立放置的鸡蛋受到热辐射时,围绕该气室的蛋壳的温度升高。相反,当鸡蛋正立时,通过将其蛋壳暴露于热辐射而产生的热量消散在存在于鸡蛋内部的液体中,并且于是鸡蛋的蛋壳表现为“冷”。
14、然而,此类方法需要预备鸡蛋加热步骤,该预备鸡蛋加热步骤是耗时的并且降低了在处理线上可能达到的处理吞吐量,这些吞吐量通常不超过70,000个鸡蛋/小时。
15、另外,该预先加热步骤通常是用功率大于3,000w或甚至5,000w和更大的卤素型闪光灯进行,以提供倒立放置的鸡蛋的蛋壳的可检测的温度升高,而不显著地加热该鸡蛋的其余部分。事实上,鸡蛋的其他部分(即蛋黄、羊水和胚胎)的温度升高必须保持可忽略不计。
16、当前,这些光源的能量消耗非常显著并且因此是昂贵的。
17、因此,迫切需要一种用于检查放置在容器中的鸡蛋的方法,该方法的原始设计使得能够克服上述现有技术的缺点。
18、本发明的主题
19、本发明旨在通过提出一种用于无接触地检查放置在容器中的鸡蛋的方法和装置来克服现有技术的缺点,该方法和装置在设计和操作模式上是简单的、是有成本效益的并且对外部环境或待测量的鸡蛋的清洁状态不敏感。
20、本发明的另一个目的是此类无接触检查方法和装置允许极快的速率,并且作为示例,为每小时超过90,000个鸡蛋的速率。
21、本发明的又另一个主题是此类无接触检查方法和装置对于鸡蛋的胚胎更安全,并且因此促进这些鸡蛋的孵化以确保更大的产率。
技术实现思路
1、为此,本发明涉及一种用于无接触地检查鸡蛋的方法。根据本发明,执行以下步骤:
2、a)通过发射器朝向鸡蛋发射毫米波射频信号;
3、b)借助于传感器检测由所述鸡蛋反射的毫米波射频信号,所述传感器被放置在距所述鸡蛋一定距离处;
4、c)基于所反射的毫米波射频信号行进的距离来对所反射的信号的强度进行分析,并且将如此获得的雷达回波与各自表示一种鸡蛋状态的一个或多个参考雷达回波进行比较,以便从其推导出该鸡蛋的当前状态。
5、该方法用于无接触地检查批次或容器或托盘中的鸡蛋,该方法的原始设计实现毫米波频率范围内的雷达波,该原始设计允许极快的速率,通常大于每小时90,000个鸡蛋以及更多。
6、该检查方法也对外部环境不敏感,例如对寄生光、寄生热源或环境温度变化不敏感。
7、不管待检查的鸡蛋的清洁状态如何,该检查方法都允许确定:
8、-定位鸡蛋的正立或倒立定位,这是可靠且快速的;或者
9、-鸡蛋的存活状态或非活状态,该确定需要鸡蛋被孵化,因为其是基于对胚胎的任选运动的检测。该测量是基于对由鸡蛋内部的胚胎反射的信号的相位的低变化的测量。相位波动的测量是基于对集成到所实施的传感器中的雷达回波的分析。
10、根据用于无接触地检查鸡蛋的该方法的一个实施方案,发射器和传感器通过同轴地布置而定位在距鸡蛋相同的距离处,或基本上在相同的距离处。
11、另选地,当然可能的是发射器和传感器不被放置在距目标相同的距离处。
12、根据用于无接触地检查鸡蛋的该方法的另一个实施方案,鸡蛋处于确定所述鸡蛋的第一端部和第二端部的固定位置,该鸡蛋具有气室,该气室可被放置在所述第一端部或所述第二端部,当气室被放置在这些端部中的一个端部时,该端部确定鸡蛋的倒立或倒置布置,该鸡蛋的位置被检测以识别该鸡蛋的可能倒立布置。
13、另选地,确定如此进行分析的鸡蛋的活的、非活的——即未受精的或死亡的——不确定的状态或者确定鸡蛋的不存在。
14、有利地,然后对于包括胚胎的每个受精鸡蛋,要确定该胚胎是活的还是死的,或者是畸形的还是与其年龄相比太小的。
15、然后检测此类状态,有利地在容器的其余处理中忽略对应鸡蛋,特别是在该鸡蛋的选择性注射步骤中。
16、如果托盘的凹坑或者容器是空的,则在容器的剩余处理中也绕过该凹坑。
17、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,鸡蛋被放置在由传送带输送的托盘的凹坑中,所述发射器被布置成使得所述传送带在所述发射器下方或上方移动所述鸡蛋,该发射器能够发射毫米波射频信号,所述发射器在接收待分析的鸡蛋的所述凹坑上居中或基本上居中。
18、当然,并且纯粹作为示例,第一发射器可被布置成来到鸡蛋的上方,而第二发射器被布置成来到同一鸡蛋的下方,以便采集将被分析的两个雷达回波,以便具有更精确的测量。
19、毫米波对应于介于30ghz至300ghz之间的频率范围。
20、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,在步骤a)中,在30ghz至300ghz之间、并且甚至更好地在150ghz至300ghz之间、并且甚至更优选地在200ghz至300ghz之间的频率范围内发射毫米波射频信号。
21、实现高频提高了测量的准确度。
22、另选地,可使用介于50ghz至70ghz之间的频率,并且更好地是约60ghz的频率。
23、这些频率有利地经历与频率成比例的强路径衰减。此外,并且有利地,很少使用60ghz的频率(0.5mm波长),并且在环境电磁图中不存在该频率。没有外部污染可能破坏所产生的雷达测量结果。
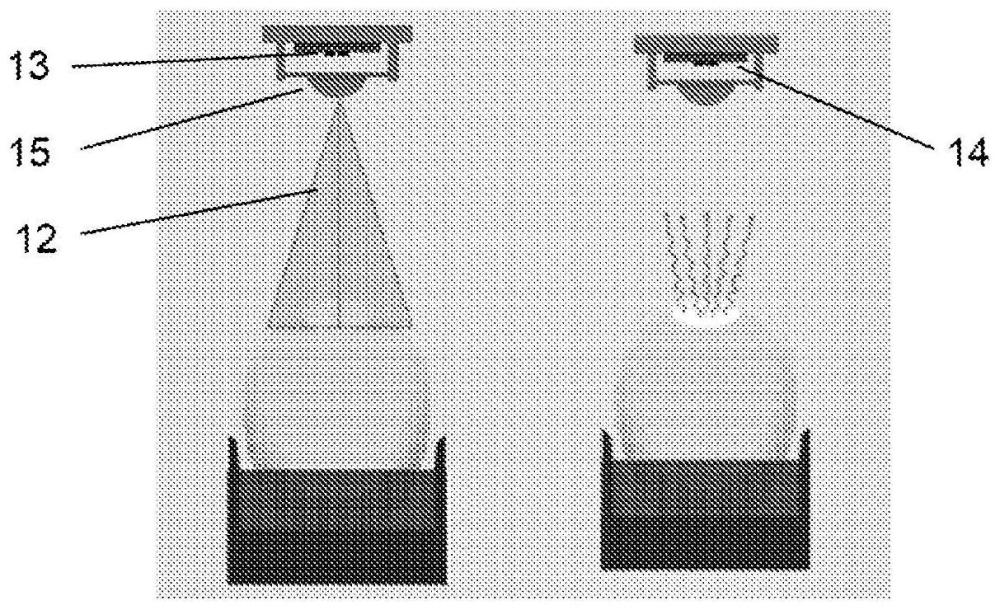
24、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,在步骤a)中,将聚焦的毫米波束发射到所述鸡蛋上。
25、优选地,使用聚焦透镜,并且甚至更好地使用凸透镜。该凸透镜可有利地通过三维印刷来获得。
26、有利地,该聚焦透镜相对于发射器定位成使得由该发射器发射的毫米波束的发散度小于10°,并且甚至更好地严格小于8°,并且优选地小于或等于6°。
27、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,对由鸡蛋反射的毫米波射频信号的检测是在没有朝向所述鸡蛋发射毫米波射频信号的情况下执行。
28、这避免了入射射频信号和由鸡蛋反射的射频信号的混合。
29、在另选实施方案中,可实现在连续发射中操作的传感器,具有用于分析雷达回波的延迟和相移的干涉检测构件。
30、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,执行标记非活且倒立的鸡蛋的附加步骤和/或重新定向倒立布置的鸡蛋的附加步骤。
31、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,在步骤c)中,处理与给定容器相关的数据,通过该处理获得的信息被存储在和/或发送到远程鸡蛋处理站(诸如,用于递送鸡蛋的卵内注射的装置),使得接收待处理的鸡蛋的所述容器的该远程处理站具有其处理所必需的信息。
32、因此,这确保了每个容器的处理的连续性,高吞吐量处理线上的下一处理站已经从无接触检查装置接收到与在其被接收之前要处理的容器有关的信息。
33、根据该检查方法的又另一实施方案,对容器的雷达回波的采集以及与雷达回波相关的数据的处理是并行执行的,使得执行对与针对第一容器获得的雷达回波相关的数据的处理,同时针对所述传送带上的下一紧邻容器采集雷达回波
34、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,所述托盘由直线传送带以恒定速度v输送。
35、在每个容器平移的情况下,特别是在直线传送带上以恒定速度平移的情况下,这在高吞吐量下具有避免颠簸的优点,鸡蛋在其相应的容器凹坑中保持稳定,因此具有最佳定位,用于随后的注射。
36、例如,这是环形带传送带。
37、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,所述托盘以严格大于或等于1m/min、并且甚至更好地以10m/min、并且甚至更优选地约15m/min的速度被输送,这些托盘间隔开至少等于d=100mm的安全距离,以确保高处理吞吐量。
38、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,在对所述容器中容纳的鸡蛋进行测量期间,借助于位置传感器来确定正被测量的所述容器的长度,将所述容器的如此测量的长度与其实际长度进行比较,并且在该无接触检查方法的步骤a)和/或步骤b)期间确定所述容器的无意移动的不存在或存在。
39、有利地,该步骤的原始设计允许简单且廉价地检测由传送带传送的容器的无意移动,这种移动会导致在对所传送的鸡蛋进行测量时失去其在传送带上的准确位置。
40、优选地,该位置传感器被布置成检测在所述传送带上移动的容器的前端部部和后端部部,测量分开该传感器对所述端部部的检测的时间间隔,并且通过该时间间隔乘以该容器沿着所述处理线的驱动速度的乘积来计算容器的测量长度。
41、有利地,该位置传感器被布置成当容器的那些端部在容器沿着处理线传送期间正好在该传感器旁边经过时检测容器的那些端部。
42、另选地,该位置传感器被布置成检测在所述传送带上移动的容器的前端部和后端部,确定在所述传感器检测到这些前端部和后端部之间经过的编码器点的数量,并且该编码器点的数量被转换成所述容器的测量长度。
43、由于在编码器运行期间传送带的带所行进的距离是已知的,因此这样确定的编码器点的数量可以容易地被转化或转换为距离。
44、请注意,每个编码器的编码器点的数量与该编码器的分辨率相关联。
45、编码器有利地发射给出在两个前端和后端的检测之间产生的编码器点的数量的电信号。
46、有利地,容器长度的这种测量因此独立于传送带的驱动速度。
47、在比较步骤期间,还可以考虑在容器的测量长度上预先确定的公差范围。
48、根据用于无接触地检查鸡蛋的该方法的又另一实施方案,在步骤c)中并且在比较之前,执行处理步骤以去除所获得的雷达回波中的任何干扰信号。
49、有利地,仅保留来自如此检查的鸡蛋的有用信号。
50、这些干扰信号可来自容器,对于该容器,高点/厚边缘可从雷达回波中出现。
51、可设想不同的处理方法来消除这些干扰信号,诸如
52、-减小用于分类的雷达回波的有用数据区域:例如,通过仅保留有用深度的回波(鸡蛋的上半部分),或者通过从鸡蛋的边缘去除样本。
53、-执行“空容器或托盘”的测量,并且将如此获得的信号作为参考来“减去”在扫描鸡蛋时获得的信号。
54、本发明还涉及一种用于自动无接触地检查鸡蛋(诸如家禽蛋)的装置,该装置包括:对于每个鸡蛋,雷达模块被配置为朝向所述鸡蛋发射毫米波并且检测由所述鸡蛋反射的毫米波,所述雷达模块发射从如此进行检测的所反射的毫米波输出的信号,所述测量装置包括处理单元,该处理单元用于分析所输出的信号并且从其推导对应鸡蛋的状态。
55、此类设备有利地允许无接触地检查布置在容器或筐中的鸡蛋,同时对于鸡蛋的胚胎更安全。
56、该设备特别适用于在用于处理具有易碎内容物的物体的工业自动生产线上的物体的高吞吐量处理。
57、根据用于无接触地检查鸡蛋的该装置的一个实施方案,每个雷达模块包括透镜,该透镜用于将毫米波束聚焦在对应鸡蛋上,所述聚焦透镜优选地是凸透镜。
58、根据用于无接触地检查鸡蛋的该装置的另一个实施方案,所述雷达模块被配置为在30ghz至300ghz之间、并且甚至更好地在150ghz至300ghz之间、并且甚至更优选地在200ghz至300ghz之间的频率范围内朝向鸡蛋发射毫米波射频信号。
59、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,每个雷达模块被配置为发射功率小于0.15mw/cm2、并且甚至更好地小于或等于0.1mw/cm2的毫米波束,以避免胚胎发育的任何风险。
60、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,所述雷达模块包括第一天线和第二天线,该第一天线用于朝向所述鸡蛋发射毫米波束,该第二天线用于接收由所述鸡蛋反射的毫米波,所述第一天线和所述第二天线由同一支承件承载,同时同轴。
61、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,该装置包括用于移动托盘的直线传送带,该托盘包括以行和列布置的凹坑,每一行包括n个凹坑,所述传送带限定传送轴线,所述装置包括沿着同一测量轴线对准的n个雷达模块,该测量轴线垂直于或基本上垂直于所述传送轴线,所述雷达模块以相等或基本上相等的距离彼此间隔开,以在所述行的凹坑中的单个凹坑被分别放置在所述雷达模块下方和/或上方时来到该单个凹坑的上方和/或下方。
62、有利地,该检查装置包括控制单元,该控制单元检查传送带传输送托盘的速度,该控制单元被配置为定义这些托盘沿着传送路径的恒定输送速度。
63、更一般地,托盘在直线传送带上的移动是在没有颠簸的情况下进行的。
64、恒速移动尤其确保了鸡蛋在其凹坑中的稳定性,并且因此确保了这些鸡蛋的最佳方向,用于随后在高速处理线的其他站上处理。
65、优选地,该装置还包括至少一个位置传感器,该至少一个位置传感器被放置在所述传送带上的所述雷达模块的上游并且连接到中央单元,使得针对鸡蛋托盘发起数据采集循环,该鸡蛋托盘的下游端部在由所述位置传感器限定的第一位置中被检测,所述中央单元被配置为在采集期间在鸡蛋托盘的行的每个通道上触发所述毫米波发射。
66、有利地,每个位置传感器是例如被放置在传送带的传送带侧上的光电池。
67、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,每个雷达模块被布置成当托盘的正被采集的该凹坑分别在雷达模块下方和/或上方经过时在该对应凹坑的对称轴线上居中或基本上居中。
68、用于无接触地检查鸡蛋的装置因此对于每个对应的凹坑可包括第一雷达模块和第二雷达模块,该第一雷达模块旨在被放置在该凹坑上方,该第二雷达模块旨在当托盘在这些雷达模块之间移动时同时定位在该凹坑下方。
69、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,该装置包括通信模块,该通信模块用于将通过处理给定托盘的鸡蛋的雷达回波而获得的数据或信息发送到远程站(诸如用于该托盘的鸡蛋的卵内注射的装置)。
70、根据用于无接触地检查鸡蛋的该装置的又另一实施方案,该装置包括用于标记非活鸡蛋以及那些倒立布置的鸡蛋的构件。该装置还可包括用于重新定向倒立布置的鸡蛋的装置,使得再次将鸡蛋正立地放置在其凹坑中。
本文地址:https://www.jishuxx.com/zhuanli/20240614/103879.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表