一种植物组培快繁智能化立体培养系统
- 国知局
- 2024-07-12 13:21:19
本发明涉及植物组培,具体为一种植物组培快繁智能化立体培养系统。
背景技术:
1、组织培养技术是在无菌的条件下将活器官、组织或细胞置于培养基内,并放在适宜的环境中,进行连续培养而成的细胞、组织或个体,其主要利用细胞全能性,即每个细胞都具有一套完整的遗传物质,通过培养基中的各种激素的特殊组合诱导已分化的植物组织进行脱分化,从而诱导成愈伤组织,再进一步诱导出新个体;这种技术已广泛应用于农业和生物、医药的研究,为植物快速繁殖、植物物种保护以及相关研究作出了巨大的贡献。
2、现有技术中植物组培系统不具备自动出入库和自动巡检装置,仍然需要人力进行物料的出入库、巡检和观察组培苗的生长状态,不能实现真正意义上的智能化培养,同时分析组培苗的生长状态需要巨大的数据量和复杂的计算,效率低下,且库存利用低;鉴于此,本发明提供一种植物组培快繁智能化立体培养系统。
技术实现思路
1、针对现有技术的不足,本发明提供了一种植物组培快繁智能化立体培养系统,具备真正实现组培室的智能化管理控制(自动出入库、自动巡检、智能照明),组培室作业区真正实现无人化管理、大大提高了工作效率及作业区的综合利用率等优点,解决了现有技术中的组培系统采用纯人工操作,效率低下,库存利用低的问题。
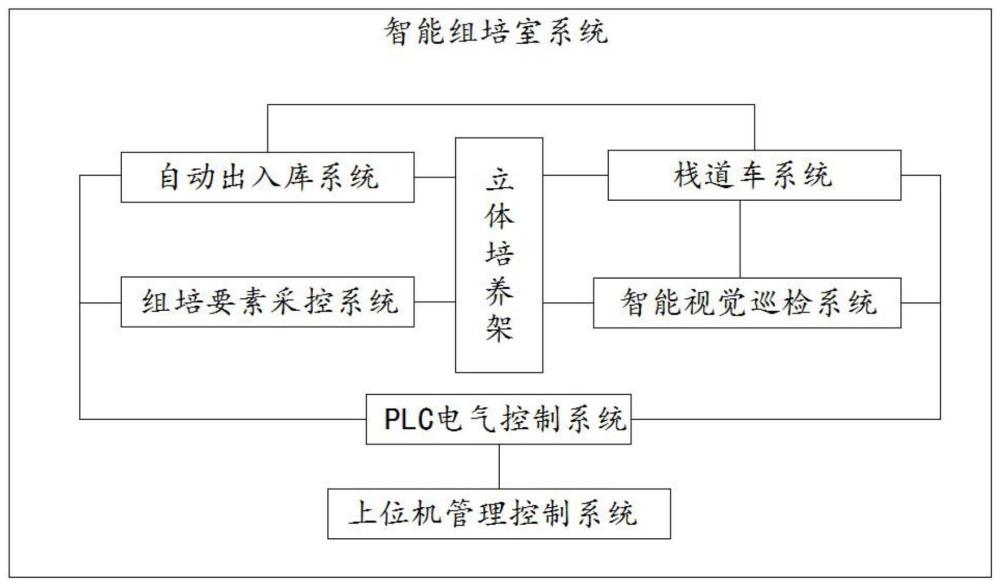
2、为实现上述目的,本发明提供如下技术方案:一种植物组培快繁智能化立体培养系统,包括组培室(组织培养室),所述组培室的内部设置有立体培养架、自动出入库输送系统、栈道车系统、组培要素采控系统、智能视觉巡检系统、上位机管理控制系统、plc电气控制系统,所述组培室内部固定连接有数量为多个的培养架;
3、所述上位机管理控制系统与plc电气控制系统信号连接,所述自动出入库输送系统、栈道车系统、组培要素采控系统及智能视觉巡检系统均与plc电气控制系统电连接。
4、进一步,所述培养架分成多排,每排培养架分成多行多列,进行格子化布置,每个格子为一个库位;所述培养架的库位中放置有培养框,且库位大小与标准培养框一致,每层所述培养架的内顶壁均固定连接有照明灯,所述培养架的库位底部开设有操作口,方便使机械手利用操作口进出培养架,实现对培养框的输送。
5、进一步,所述栈道车系统包括栈道车本体、机械手、x、y、z三轴伺服电机及其动力传送机构、各定位及软硬限位机构,且机械手固定连接在栈道车上,所述栈道车系统可在组培室内任意活动,所述栈道车系统用于实现培养架各库位的自动、精准取放料。
6、进一步,所述自动出入库输送系统由出入库皮带输送线、顶升皮带输送线、塑料框定位机构、分道皮带输送线、顶升机构及夹持定位机构构成;所述顶升皮带输送线固定连接在培养架上,所述分道皮带输送线位于培养架靠近顶升皮带输送线的一侧,所述出入库皮带输送线设置在分道皮带输送线远离顶升皮带输送线的一侧,所述塑料框定位机构、顶升机构及夹持定位机构均固定连接在机械手上。
7、进一步,所述组培要素采控系统包括光照采集调整装置、温度采集调控装置、紫外线灯控制装置、图像采集调控装置;所述光照采集调整装置、温度采集调控装置、图像采集调控装置均固定连接在培养架的库位内,所述紫外线灯控制装置设置在组培室的内顶壁上。
8、进一步,所述智能视觉巡检系统由视觉系统、视觉运动控制系统等组成,所述视觉系统和视觉运动控制系统均固定连接在栈道车本体上。
9、进一步,所述上位机管理控制系统包括工业计算机及大屏显示系统等硬件部分,以及库存管理系统、视觉控制系统、扫码系统等软件系统,所述上位机管理控制系统用于根据本地数据和网络数据进行分析对比,形成组培标准。
10、进一步,所述plc电气控制系统由低压器件和触摸屏软件控制系统组成,所述低压器件由plc、触摸屏、伺服驱动器、断路器、接触器、继电器、开关电源组成,所述触摸屏软件控制系统用于与上位机进行信号交换,所述触摸屏软件控制系统可配合低压器件对智能组培室的各皮带线、栈道车本体、视觉运动控制系统等进行控制。
11、与现有技术相比,本发明提供了一种植物组培快繁智能化立体培养系统,具备以下有益效果:
12、该植物组培快繁智能化立体培养系统,可通过上位机管理控制系统与plc电气控制系统的信号交换,使plc电气控制系统对组培室内各系统中的电子器件进行协调控制,使得各系统正常运行,以便于真正实现组培室的智能化管理控制(自动出入库、自动巡检、组培要素调控),配合智能视觉巡检系统的对植物生产状态的全方位、全角度检查,还可根据巡检结果对组培植物进行重新入库或出库,真正实现组培室作业区的无人化管理、有效提高工作效率及作业区的综合利用率。
技术特征:1.一种植物组培快繁智能化立体培养系统,包括组培室(组织培养室),其特征在于:所述组培室的内部设置有立体培养架、自动出入库输送系统、栈道车系统、组培要素采控系统、智能视觉巡检系统、上位机管理控制系统、plc电气控制系统,所述组培室内部固定连接有数量为多个的培养架;
2.根据权利要求1所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述培养架分成多排,每排培养架分成多行多列,进行格子化布置,每个格子为一个库位;所述培养架的库位中放置有培养框,且库位大小与标准培养框一致,每层所述培养架的内顶壁均固定连接有照明灯,所述培养架的库位底部开设有操作口,方便使机械手利用操作口进出培养架,实现对培养框的输送。
3.根据权利要求1所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述栈道车系统包括栈道车本体、机械手、x、y、z三轴伺服电机及其动力传送机构、各定位及软硬限位机构,且机械手固定连接在栈道车上,所述栈道车系统可在组培室内任意活动,所述栈道车系统用于实现培养架各库位的自动、精准取放料。
4.根据权利要求1所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述自动出入库输送系统由出入库皮带输送线、顶升皮带输送线、塑料框定位机构、分道皮带输送线、顶升机构及夹持定位机构构成;所述顶升皮带输送线固定连接在培养架上,所述分道皮带输送线位于培养架靠近顶升皮带输送线的一侧,所述出入库皮带输送线设置在分道皮带输送线远离顶升皮带输送线的一侧,所述塑料框定位机构、顶升机构及夹持定位机构均固定连接在机械手上。
5.根据权利要求2所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述组培要素采控系统包括光照采集调整装置、温度采集调控装置、紫外线灯控制装置、图像采集调控装置;所述光照采集调整装置、温度采集调控装置、图像采集调控装置均固定连接在培养架的库位内,所述紫外线灯控制装置设置在组培室的内顶壁上。
6.根据权利要求3所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述智能视觉巡检系统由视觉系统、视觉运动控制系统等组成,所述视觉系统和视觉运动控制系统均固定连接在栈道车本体上。
7.根据权利要求1所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述上位机管理控制系统包括工业计算机及大屏显示系统等硬件部分,以及库存管理系统、视觉控制系统、扫码系统等软件系统,所述上位机管理控制系统用于根据本地数据和网络数据进行分析对比,形成组培标准。
8.根据权利要求1所述的一种植物组培快繁智能化立体培养系统,其特征在于:所述plc电气控制系统由低压器件和触摸屏软件控制系统组成,所述低压器件由plc、触摸屏、伺服驱动器、断路器、接触器、继电器、开关电源组成,所述触摸屏软件控制系统用于与上位机进行信号交换,所述触摸屏软件控制系统可配合低压器件对智能组培室的各皮带线、栈道车本体、视觉运动控制系统等进行控制。
技术总结本发明涉及一种植物组培快繁智能化立体培养系统,包括组培室(组织培养室),其特征在于:所述组培室的内部设置有立体培养架、自动出入库输送系统、栈道车系统、组培要素采控系统、智能视觉巡检系统、上位机管理控制系统、PLC电气控制系统,所述组培室内部固定连接有数量为多个的培养架。该植物组培快繁智能化立体培养系统,可使得上位机管理控制系统配合PLC电气控制系统按照组培标准向其他各系统发送和接收信号,控制并协调各系统的运行,真正实现植物组培室的智能化管理控制(自动出入库、自动巡检、光照采控、温度采控、紫外线灯控制、图像采控),组培室作业区真正实现无人化管理、大大提高了工作效率及作业区的综合利用率。技术研发人员:孙崇波,王筠竹,杜建科,柯红金受保护的技术使用者:浙江省农业科学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104642.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表