一种全髋关节置换导航系统及方法与流程
- 国知局
- 2024-07-12 10:40:03
本发明涉及医学辅助治疗,特别涉及一种全髋关节置换导航系统及方法。
背景技术:
1、随着人口老龄化趋势的不断发展,人工关节置换手术增多。全髋关节置换术其主要适用于骨性关节炎、股骨头坏死、部分髋部骨折、类风湿性关节炎、创伤性关节炎、强直性脊柱炎等,应用广泛。
2、全髋关节由人工髋臼和人工股骨头组成。全髋关节置换传统的方法是根据x片或ct/mri影像资料在患者髋关节部位术前进行相应的标识,再进行手术,这种方法不但要依靠经验积累,而且随着患者特点不同,难以保证髋臼杯准确定位和放置,在全髋关节置换手术中,髋臼杯如果放置位置不准,可能导致髋臼杯松动,并最终导致手术失败、假体创伤、运动范围受限、衬垫过度磨损和骨溶解等并发症。此类并发症需要对患者翻修手术,将对患者带来二次伤害并导致医疗保健成本的显著增加。
3、为解决髋臼杯定位准确性问题,近几年出现了许多手术导航方法和仪器。
4、概括为:
5、1、借助于ct/mri设备方法,这种方法是以ct/mri影像资料为基础,规划手术方案过程中根据手术进行的环节,要对患者多次进行ct/mri检查,由此增加了手术时间;影响资料转换手术实施方案代理的误差会造成髋臼杯定位误差;多次ct/mri会对患者造成签字的辐射风险。
6、2、流行的手术机器人方法,手术机器人在国内外都有全髋关节置换成功使用案例,取得了较好的效果。但机器人方法存在问题:(1)对外科医生提出了较高的要求,医生在使用设备前,必须熟练掌握设备操作,手术中必须处理由于使用不当代理的问题等。(2)机器人对普通患者医疗成本太高,患者通常选取更为简单且性价比高的方法,这样会造成手术机器人使用率不高的问题。(3)手术机器人以后设备维护费用较高等。
7、3、机械定位,是手术前利用专用机械工具确定患者的相应前倾角和外翻角,并知道全髋关节置换手术,这种方法问题是:(1)对不同患者不能满足个性化要求;(2)手术动态情况下很难弯曲保证髋臼杯定位准确度;(3)工具定位随着使用时间增长其机械结构的变形,工具的精度难以保证。
8、本发明提出一种全髋关节置换导航系统及方法,用于解决现有技术中髋臼杯假体安装成本高、误差大、精度低的问题。
技术实现思路
1、本发明提供一种全髋关节置换导航系统及方法,解决了现有技术中髋臼杯假体安装成本高、误差大、精度低的问题,降低了髋臼杯假体安装成本,提升了髋臼杯假体的安装精度。
2、本发明提供了一种全髋关节置换导航系统,包括参考基准装置,其固定在手术床上仰卧位患者的骨盆处;髋臼杯打击器,用于调整髋臼杯假体的安装位置;定位装置,其分时可拆卸安装在参考基准装置和髋臼杯打击器上,其中,所述定位装置包括:
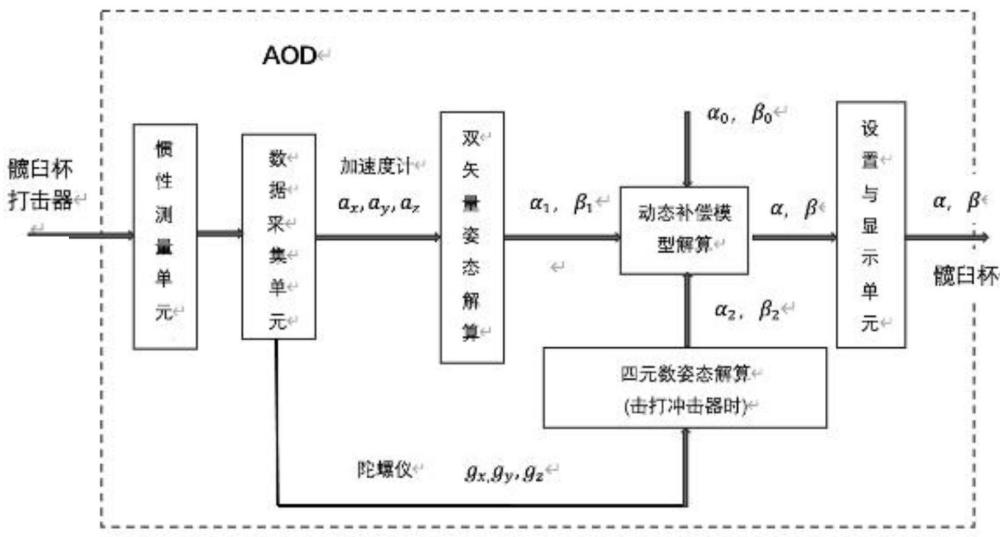
3、数据获取模块,用于获取患者髋关节的初始加速度;及用于获取髋臼杯假体安装过程中髋臼杯假体的实时加速度和髋臼杯假体的动态角速度;
4、双矢量定姿模块,用于根据髋关节的初始加速度,通过双矢量定姿法获得髋关节的初始前倾角和初始外翻角;用于根据髋臼杯假体的实时加速度,通过双矢量定姿法获得髋臼杯假体安装过程中髋臼杯假体的实时前倾角、实时外翻角;
5、四元数定姿模块,用于根据髋臼杯假体的动态角速度,通过四元数定姿法获得髋臼杯假体的动态前倾角和动态外翻角;
6、数据处理模块,用于根据髋臼杯假体的动态前倾角和动态外翻角,对髋臼杯假体的实时前倾角和实时外翻角进行补偿修正;将修正后的实时前倾角和实时外翻角与目标前倾角和目标外翻角进行比对,当修正后的实时前倾角和实时外翻角与目标前倾角和目标外翻角不一致时,随着外部髋臼杯打击器击打方位的调整,修正后的实时前倾角和实时外翻角通过不断迭代逼近目标前倾角和目标外翻角,使髋臼杯假体的实时前倾角和实时外翻角与目标前倾角和目标外翻角一致,实现将髋臼杯假体定位和安装。
7、上述根据髋臼杯假体的动态前倾角和动态外翻角,通过加权融合方法对髋臼杯假体的实时前倾角和实时外翻角进行补偿修正。
8、上述目标前倾角和目标外翻角是根据髋关节的初始前倾角和初始外翻角以及患者的身高、体重以及病灶位置确定,所述定位装置还包括:显示单元,与数据处理模块连接,将目标前倾角和目标外翻角发送给数据处理模块。
9、上述数据获取模块包括:
10、三轴加速度计,用于测量髋关节的初始加速度和髋臼杯假体安装过程中髋臼杯假体的动态加速度;
11、三轴陀螺仪,用于测量髋臼杯假体安装过程中的动态角速度。
12、上述定位装置根据患者的病灶位置,术前安装在参考基准装置的左侧或右侧,进行初始对准,获取髋关节的初始前倾角和初始外翻角;
13、完成初始对准后,所述定位装置从参考基准装置上取下,安装在髋臼杯打击器上。
14、一种全髋关节置换导航方法,包括以下步骤:
15、将参考基准装置安装在仰卧患者的骨盆处,将定位装置安装在参考基准装置上,进行初始对准,检测髋关节的初始加速度;根据髋关节的初始加速度,通过双矢量定姿法获得髋关节的初始前倾角和初始外翻角;根据髋关节的初始前倾角和初始外翻角,确定目标前倾角和目标外翻角;
16、完成初始对准后,将定位装置从参考基准装置上取下,安装在髋臼杯打击器上,检测髋臼杯假体的实时加速度信息和动态角速度;
17、根据髋臼杯假体的实时加速度,通过双矢量定姿法获得髋臼杯假体的实时前倾角和实时外翻角;
18、根据当击打髋臼杯打击器以调整髋臼杯假体的安装位置时髋臼杯假体的动态角速度,通过四元数定姿法获得髋臼杯假体的动态前倾角和动态外翻角;
19、根据髋臼杯假体的动态前倾角和动态外翻角,对髋臼杯假体的实时前倾角和实时外翻角进行补偿修正;将修正后的实时前倾角和实时外翻角与目标前倾角和目标外翻角进行比对,当修正后的实时前倾角和实时外翻角与目标前倾角和目标外翻角不一致时,随着外部髋臼杯打击器击打方位的调整,修正后的实时前倾角和实时外翻角通过不断迭代逼近目标前倾角和目标外翻角,使髋臼杯假体的实时前倾角和实时外翻角与目标前倾角和目标外翻角一致,实现将髋臼杯假体定位和安装。
20、上述根据髋臼杯假体的动态前倾角和动态外翻角,通过加权融合方法对髋臼杯假体的实时前倾角和实时外翻角进行补偿修正。
21、上述目标前倾角和目标外翻角是根据髋关节的初始前倾角和初始外翻角以及患者的身高、体重以及病灶位置确定。
22、上述双矢量定姿法获得髋臼杯假体的实时前倾角、实时外翻角的具体方法包括:
23、在三维空间中有两个直角坐标系n系和b系,n系为骨盆坐标系,b系为髋臼杯假体坐标系,已知两个不共线的参考矢量v1和v2,在两个坐标系下的投影坐标分别记为和通过已知投影坐标求解b系和n系两坐标系间的方位关系,用方向余弦阵来描述,记为参考矢量v1和v2在n系和b系下存在如下转换关系式:
24、
25、
26、为了求解再构造一个矢量等式,构造方法是将式(1)叉乘式(2),得到矢量等式:
27、
28、根据式(1)、式(2)和式(3)写出矩阵形式如下:
29、
30、其中,和均为x轴加速度,和均为y轴加速度,和均为z轴加速度;
31、由式(4)求出b系到n系的姿态角,称为双矢量定姿;
32、采用双矢量定姿方法获得髋臼杯假体的实时前倾角和实时外翻角为:
33、
34、式(5)中α,β是实时前倾角和实时外翻角,ax,ay,az分别是x轴、y轴、z轴的加速度。
35、上述根据击打髋臼杯打击器时髋臼杯假体的动态角速度,通过四元数定姿法获得髋臼杯假体的动态前倾角和动态外翻角的具体方法包括:
36、假设空间一个矢量v=xi+yj+zk表示为四元数形式:
37、q=q0+q1i+q2j+q3k (6)
38、矢量v=xi+yj+zk相对于坐标系oxyz转动一个角度到另一个坐标系ox'y'z',矢量表示为:v'=x'i+y'j+z'k,这样两个坐标系之间的转换关系为:
39、
40、其中:c13=2(q1q3-q0q2);c21=2(q1q2-q0q3);c23=2(q2q3-q0q1);
41、c31=2(q1q3+q0q2);c32=2(q2q3-q0q1);
42、在此系统中,将骨盆坐标系利用四元数转换为髋臼杯假体坐标系时,其转换矩阵为:
43、
44、四元数微分方程表示为:
45、
46、式(9)中是髋臼杯假体坐标系相对骨盆坐标系的角速度,为髋臼杯假体坐标系下x方向的角速度,为髋臼杯假体坐标系下y方向的角速度,为髋臼杯假体坐标系下z方向的角速度,由此解算出髋臼杯假体的动态前倾角α2和动态外翻角β2分别为:
47、sinα2=2(q0q2-q1q3) (10)
48、
49、与现有技术相比,本发明的有益效果在于:
50、本发明根据患者术前髋关节初始加速度和髋臼杯假体的实时加速度,通过双矢量定姿法获得髋关节的初始前倾角、初始外翻角以及髋臼杯假体的实时前倾角、实时外翻角,击打髋臼杯打击器时,根据髋臼杯假体的动态角速度,通过四元数定姿法获得髋臼杯假体的动态前倾角和动态外翻角,根据髋臼杯假体的动态前倾角和动态外翻角,通过加权融合对髋臼杯假体的实时前倾角和实时外翻角进行补偿修正,使髋臼杯假体的实时前倾角和实时外翻角与目标前倾角和目标外翻角一致,实现将髋臼杯假体的准确定位和安装,本发明实时导航,不需要多次ct/mri影像数据,不会对患者造成二次伤害;本发明为全髋关节置换微创手术奠定了坚实基础。
51、本发明充分考虑手术过程中的动态环境和干扰,克服髋臼杯假体安装时髋臼杯打击器振动、冲击带来的干扰,提高了髋臼杯假体安装的精度,对患者术后恢复具有极大帮助。
52、本发明根据患者特点进行个性化手术,使得手术成功率有了极大的提高;本发明装置设置简单,操作便捷,对医生经验积累要求较低;本发明适合具有资质医院的广泛推广使用;本发明是目前流行性daa微创手术关键装置。
本文地址:https://www.jishuxx.com/zhuanli/20240614/88402.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表