一种可感知的智能拉钩的制作方法
- 国知局
- 2024-07-12 10:43:38
本技术涉及电钩,尤其是涉及一种可感知的智能拉钩。
背景技术:
1、电钩是胸腔镜手术常用器械,功能与电刀相似,其工作原理是电钩与患者身体和贴附在患者皮肤的负极板形成电回路,在电极中产生电流进行组织切割,形状类似于钩子一样。
2、现有的电钩在进行使用时钩头触碰到组织后不能够进行感知,当操作者手部感受到阻挡时,钩头已经抵触在组织上,不能够进行精细的操作。
技术实现思路
1、本实用新型提供一种可感知的智能拉钩,以解决现有技术中的问题。
2、本实用新型所解决的技术问题采用以下技术方案来实现:
3、一种可感知的智能拉钩,包括:
4、握杆部,所述握杆部包括握柄和固定连接在所述握柄一端的外管件,所述握柄的另一端安装有电极头;
5、电钩杆,所述电钩杆包括固定安装在所述外管件内部的导电管和插接连接在所述导电管一端的电钩头件;
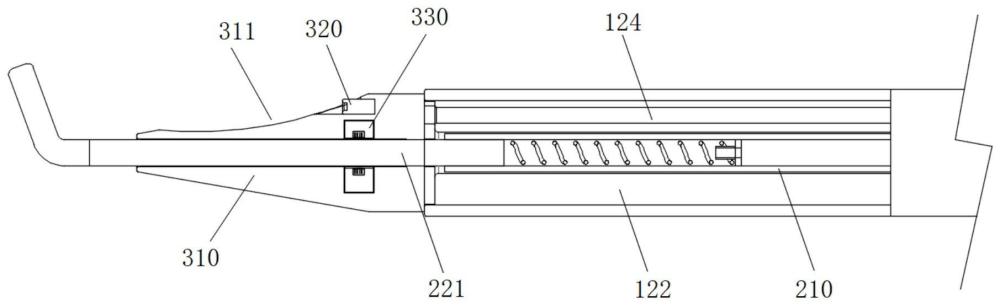
6、传感端头部,所述传感端头部包括固定连接在所述外管件一端的绝缘套头,所述绝缘套头内安装有微型摄像头和微型位移传感器,所述微型位移传感器对电钩头件触碰组织后的回缩位移量进行检测传感。
7、在一种具体的实施方案中,所述外管件包括管体和固定设置在所述管体内的内衬管,所述内衬管的中间开设有用于插接安装所述电钩杆的安装孔道,所述内衬管的偏心处开设有导线孔道,所述微型摄像头和微型位移传感器的传输线在导线孔道内进行走线。
8、在一种具体的实施方案中,所述管体为塑料材质制成的构件。
9、在一种具体的实施方案中,所述导电管为铜材质制成的构件,所述导电管的外径与所述安装孔道的直径相匹配。
10、在一种具体的实施方案中,所述电钩头件包括导电钩头和固定连接在所述导电管内的挡柱,所述挡柱上连接有复位弹簧,所述导电钩头的一端插接在所述导电管内且与所述复位弹簧的另一端连接。
11、在一种具体的实施方案中,所述导电钩头的直径与所述导电管的内径相匹配。
12、在一种具体的实施方案中,所述绝缘套头为陶瓷材质制成的构件,所述导电钩头的直柱端插接在所述绝缘套头的套孔内。
13、在一种具体的实施方案中,所述绝缘套头上开设有凹陷位,所述微型摄像头安装在所述凹陷位内。
14、本实用新型具有的有益效果是:
15、1、将微型摄像头和微型位移传感器安装在绝缘套头内,且电钩头件插接连接在导电管的一端,微型位移传感器对电钩头件触碰组织后的回缩位移量进行检测传感,能够检测电钩头件触碰到组织后的回缩量,触碰到组织后能够直观的通过数据感知,方便操作进行精细的操作控制,同时微型摄像头能够将画面传输出方便操作进行观察操作。
16、2、将挡柱固定连接在导电管内,且导电钩头的一端插接在导电管内且与挡柱上连接的复位弹簧的另一端连接,在导电管能够对导电钩头进行导电,且导电钩头在触碰到组织进行切割完成抬起后,复位弹簧能够将导电钩头复位,方便微型位移传感器对电钩头件下一次的回缩量进行传感检测。
技术特征:1.一种可感知的智能拉钩,其特征在于,包括:
2.根据权利要求1所述的一种可感知的智能拉钩,其特征在于:所述外管件(120)包括管体(121)和固定设置在所述管体(121)内的内衬管(122),所述内衬管(122)的中间开设有用于插接安装所述电钩杆(200)的安装孔道(123),所述内衬管(122)的偏心处开设有导线孔道(124),所述微型摄像头(320)和微型位移传感器(330)的传输线在导线孔道(124)内进行走线。
3.根据权利要求2所述的一种可感知的智能拉钩,其特征在于:所述管体(121)为塑料材质制成的构件。
4.根据权利要求2所述的一种可感知的智能拉钩,其特征在于:所述导电管(210)为铜材质制成的构件,所述导电管(210)的外径与所述安装孔道(123)的直径相匹配。
5.根据权利要求4所述的一种可感知的智能拉钩,其特征在于:所述电钩头件(220)包括导电钩头(221)和固定连接在所述导电管(210)内的挡柱(222),所述挡柱(222)上连接有复位弹簧(223),所述导电钩头(221)的一端插接在所述导电管(210)内且与所述复位弹簧(223)的另一端连接。
6.根据权利要求5所述的一种可感知的智能拉钩,其特征在于:所述导电钩头(221)的直径与所述导电管(210)的内径相匹配。
7.根据权利要求6所述的一种可感知的智能拉钩,其特征在于:所述绝缘套头(310)为陶瓷材质制成的构件,所述导电钩头(221)的直柱端插接在所述绝缘套头(310)的套孔内。
8.根据权利要求7所述的一种可感知的智能拉钩,其特征在于:所述绝缘套头(310)上开设有凹陷位(311),所述微型摄像头(320)安装在所述凹陷位(311)内。
技术总结本技术涉及电钩技术领域,公开了一种可感知的智能拉钩,包括握杆部、电钩杆和传感端头部,将微型摄像头和微型位移传感器安装在绝缘套头内,且电钩头件插接连接在导电管的一端,微型位移传感器对电钩头件触碰组织后的回缩位移量进行检测传感,能够检测电钩头件触碰到组织后的回缩量,触碰到组织后能够直观的通过数据感知,方便操作进行精细的操作控制,同时微型摄像头能够将画面传输出方便操作进行观察操作;导电管能够对导电钩头进行导电,且导电钩头在触碰到组织进行切割完成抬起后,复位弹簧能够将导电钩头复位,方便微型位移传感器对电钩头件下一次的回缩量进行传感检测。技术研发人员:宋左东,杨运海受保护的技术使用者:上海市胸科医院技术研发日:20240201技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/88779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种疝气腰带的制作方法
下一篇
返回列表