一种清洁机器人的制作方法
- 国知局
- 2024-07-10 17:09:30
本技术属于家用电器,更具体地,涉及一种清洁机器人。
背景技术:
1、清洁机器人是一种能够自主行走、自主清扫家居地面灰尘和杂物的智能家居设备。它采用各种传感技术和智能算法,可以自主感知周围环境,规划出清扫路径,并自主清扫灰尘、吸尘等操作。清洁机器人还可用于吸附地面的金属件,但是,在清洁机器人行走过程中,随着清洁机器人吸附的金属件增多,堆积的金属件容易刮伤地板,给用户造成较差的使用体验。
技术实现思路
1、有鉴于此,本实用新型提供一种清洁机器人,以解决如何提升用户对清洁机器人的使用体验的技术问题。
2、本实用新型的技术方案是这样实现的:
3、本实用新型实施例提供一种清洁机器人,包括:底盘组件;拖地盘组件,与所述底盘组件可转动的连接,且至少部分突出于所述底盘组件以清洁地板;所述拖地盘组件设有容纳空间,所述拖地盘组件的底部具有第一表面,所述第一表面朝所述底盘组件凹陷以形成所述容纳空间。
4、在一些实施方案中,所述拖地盘组件包括:拖地盘本体,与所述底盘组件可转动地连接,所述拖地盘本体远离所述底盘组件的一侧用于安装抹布,所述抹布用于与地板接触并清洁地板;拖地盘盖板,连接所述拖地盘本体;所述抹布环绕所述拖地盘盖板设置,以与所述拖地盘盖板共同形成所述容纳空间,所述拖地盘盖板靠近所述容纳空间的一侧为所述第一表面,所述第一表面凹陷形成凹部。
5、在一些实施方案中,所述凹部的外径范围为10mm~20mm;和/或,所述凹部的深度范围为1mm~3mm。
6、在一些实施方案中,所述拖地盘盖板为磁吸件。
7、在一些实施方案中,所述拖地盘组件还包括:磁性组件,所述磁性组件设置于所述拖地盘盖板与所述拖地盘本体之间且与所述拖地盘本体固定。
8、在一些实施方案中,所述磁性组件包括:固定支架,与所述拖地盘本体固定;磁性件,设置于所述固定支架内;其中,所述磁性件与所述拖地盘盖板相邻设置。
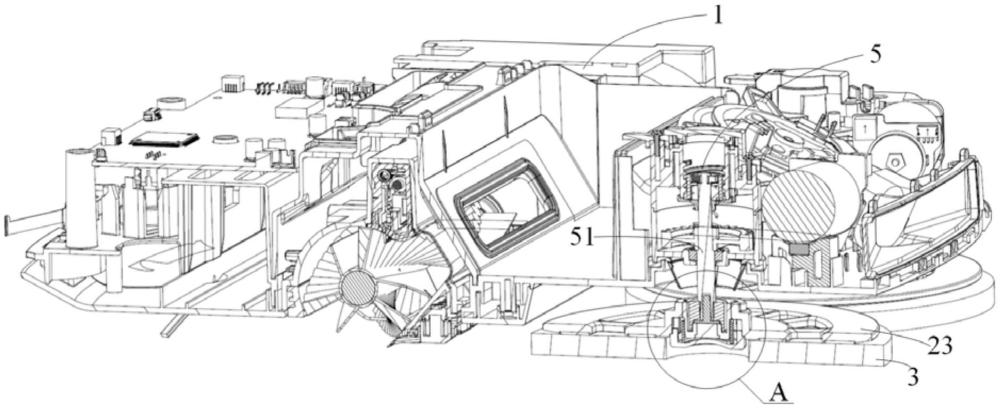
9、在一些实施方案中,所述底盘组件具有用于驱动所述拖地盘组件转动的驱动装置,所述驱动装置通过驱动轴与所述磁性组件连接。
10、在一些实施方案中,所述磁性件贴合或靠近所述驱动轴设置;所述底盘组件设置有传感元件,传感元件包括传感器和导磁体,传感器与导磁体临近设置,用于检测所述驱动轴的磁场。
11、在一些实施方案中,所述拖地盘本体环绕设置于驱动轴的外侧,所述磁性组件连接于所述拖地盘本体与所述驱动轴之间。
12、在一些实施方案中,还包括:边刷,设置于所述底盘组件的边角,用于清扫地板上的杂物;和/或,滚刷,设置于所述底盘组件,用于清扫地板上的杂物。
13、在一些实施方案中,所述清洁机器人的一侧设置用于与清洁基站电连接的接电端子,以用于所述清洁机器人的充电。
14、本实用新型实施例提供一种清洁机器人,包括底盘组件和拖地盘组件。拖地盘组件与所述底盘组件可转动的连接,且至少部分突出于所述底盘组件以清洁地板;所述拖地盘组件设有容纳空间,所述拖地盘组件的底部具有第一表面,所述第一表面朝所述底盘组件凹陷以形成所述容纳空间。本实用新型实施例的拖地盘组件的底部具有第一表面,第一表面朝底盘组件凹陷以形成容纳空间,在清洁机器人行走过程中,地板的金属件被吸附到第一表面并堆积在容纳空间内,由于第一表面朝底盘组件凹陷,从而增加了清洁机器人在使用时第一表面距离地板的距离,也进一步增大了容纳空间的容纳体积,从而被吸附到第一表面的金属件距离地板较远,且容纳空间也可吸附更多的金属件,从而清洁机器人的底部所堆积的金属件不易刮伤地板,有利于提升用户的使用体验。
技术特征:1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述拖地盘组件(2)包括:
3.根据权利要求2所述的清洁机器人,其特征在于,所述凹部(25)的外径范围为10mm~20mm;和/或,所述凹部(25)的深度范围为1mm~3mm。
4.根据权利要求2所述的清洁机器人,其特征在于,所述拖地盘盖板(24)为磁吸件。
5.根据权利要求2所述的清洁机器人,其特征在于,所述拖地盘组件(2)还包括:
6.根据权利要求5所述的清洁机器人,其特征在于,所述磁性组件(4)包括:
7.根据权利要求6所述的清洁机器人,其特征在于,所述底盘组件(1)具有用于驱动所述拖地盘组件(2)转动的驱动装置(5),所述驱动装置(5)通过驱动轴(51)与所述磁性组件(4)连接。
8.根据权利要求7所述的清洁机器人,其特征在于,所述磁性件(42)贴合或靠近所述驱动轴(51)设置;所述底盘组件(1)设置有传感元件,传感元件包括传感器和导磁体,传感器与导磁体临近设置,用于检测所述驱动轴(51)的磁场。
9.根据权利要求7所述的清洁机器人,其特征在于,所述拖地盘本体(23)环绕设置于驱动轴(51)的外侧,所述磁性组件(4)连接于所述拖地盘本体(23)与所述驱动轴(51)之间。
10.根据权利要求1所述的清洁机器人,其特征在于,还包括:
11.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人(10)的一侧设置用于与清洁基站电连接的接电端子(8),以用于所述清洁机器人(10)的充电。
技术总结本技术提供一种清洁机器人,包括底盘组件和拖地盘组件。拖地盘组件与底盘组件可转动的连接,且至少部分突出于底盘组件以清洁地板;拖地盘组件设有容纳空间,拖地盘组件的底部具有第一表面,第一表面朝底盘组件凹陷以形成所述容纳空间。本技术实施例的清洁机器人在行走过程中,地板的金属件被吸附到第一表面并堆积在容纳空间内,由于第一表面朝底盘组件凹陷,从而增加了第一表面距离地板的距离,也进一步增大了容纳空间的容纳体积,从而被吸附到第一表面的金属件距离地板较远,且容纳空间也可吸附更多的金属件,从而底部堆积的金属件不易刮伤地板,有利于提升用户的使用体验。技术研发人员:朱小刚,张伟,蒋育江,张猛,孙涛受保护的技术使用者:美智纵横科技有限责任公司技术研发日:20230928技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240615/61541.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
高翘脚电动沙发的制作方法
下一篇
返回列表