一种降噪擦窗机器人的制作方法
- 国知局
- 2024-07-10 17:44:00
本技术涉及擦窗机器人,具体涉及一种降噪擦窗机器人。
背景技术:
1、擦窗机器人是一种在平整表面上按路径家用自动清理窗户的机器。擦窗机器人作为服务机器人的一类,它的出现将使大面积玻璃窗的清洁维护变得简单,而且相对于人工清洁,机器人清洁效率高、成本低,具有一定的应用价值和商业前景。但是噪音是擦窗机器人关键之一,所以擦窗机器人对噪音要求非常高。现有擦窗机器人体积大、噪音大、装配复杂,目前没有对体积大、噪音大、装配复杂处理的合适结构。
2、现有擦窗机器人(例如现有专利《一种行走装置及具有该行走装置的擦窗机器人》,公告号cn 209712741 u)包括机体、2个行走轮盘、普通电机、齿轮组,普通电机通过齿轮组驱动2个行走轮盘转动。现有技术采用直流减速电机配合齿轮组和/或同步带传动组成驱动系统,在工作过程中,齿轮组和/或同步带的运行会产生较大的噪音、且装配复杂。
技术实现思路
1、本实用新型的目的在于公开了一种降噪擦窗机器人,解决了现有擦窗机器人噪音大、装配复杂的问题。
2、为达到上述目的,本实用新型采用如下技术方案:
3、一种降噪擦窗机器人,包括底座、设于底座底面的至少2个行走轮盘和连接行走轮盘的至少2个步进电机;行走轮盘和步进电机数量相同,且所述至少2个行走轮盘和所述至少2个步进电机一一对应连接。
4、进一步,包括连接所述底座的电机罩,底座内形成安装槽,电机罩和安装槽的槽壁连接,电机罩和安装槽形成电机安装腔,所述步进电机设于电机安装腔中。
5、进一步,所述行走轮盘的中心设有行走轮安装孔,所述步进电机的电机转轴插入行走轮安装孔中,实现电机转轴和行走轮盘同轴配合。
6、进一步,所述行走轮盘的数量是2个,分别是并列设置的第一行走轮盘和第二行走轮盘;所述步进电机的数量是2个,分别是并列设置的第一步进电机和第二步进电机;第一步进电机连接第一行走轮盘并驱动第一行走轮盘旋转,第二步进电机连接第二行走轮盘并驱动第二行走轮盘旋转。
7、进一步,所述安装槽内设有并列设置的2个安装槽通孔,安装槽通孔内设有步进电机安装座,步进电机安装座和安装槽通孔的边缘通过若干根肋条连接,若干根肋条绕步进电机安装座的边缘环形阵列布置;所述步进电机固接步进电机安装座。
8、进一步,所述安装槽通孔是圆形。
9、进一步,还包括电池模组和控制系统,电池模组连接所述步进电机,电池模组和步进电机分别连接控制系统。
10、进一步,还包括与所述底座连接的上盖,底座和上盖形成底座安装腔,所述电机罩、所述电池模组、所述控制系统设于安装腔中。
11、进一步,所述电池模组是蓄电池组。
12、进一步,所述电池模组包含有电量感测模组。
13、与现有技术相比,本实用新型的有益效果:
14、本实用新型采用行走轮盘和步进电机一一对应连接的结构,没有齿轮组和同步带,在工作过程中有效减少噪音,且装配模块化,结构简单,有效的降低整机功率,更适应于无线机器工作。采用步进电机作为动力源,体积小巧并能实现正反转和速度控制。2个步进电机、2个行走轮盘采用对称布置设计,以保证更为紧凑的机器人体型。
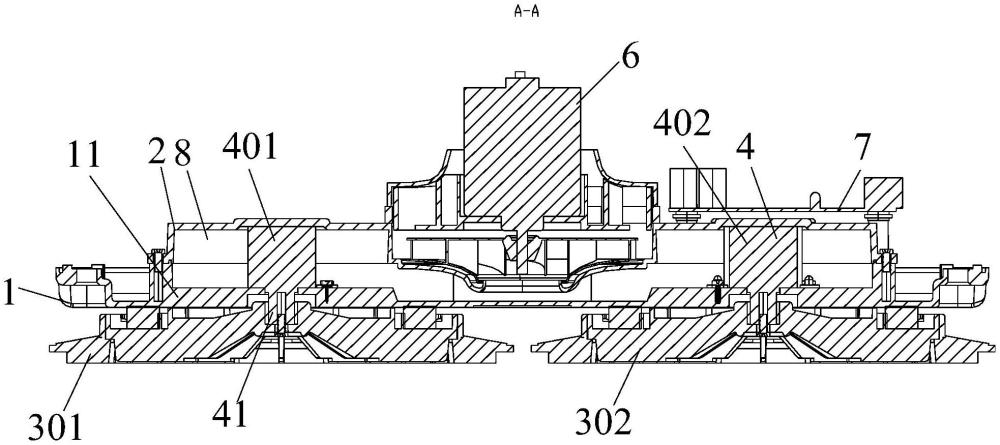
技术特征:1.一种降噪擦窗机器人,其特征在于:包括底座(1)、设于底座底面的至少2个行走轮盘(3)和连接行走轮盘的至少2个步进电机(4);行走轮盘和步进电机数量相同,且所述至少2个行走轮盘和所述至少2个步进电机一一对应连接。
2.根据权利要求1所述一种降噪擦窗机器人,其特征在于:包括连接所述底座(1)的电机罩(2),底座内形成安装槽(11),电机罩和安装槽的槽壁连接,电机罩和安装槽形成电机安装腔(8),所述步进电机(4)设于电机安装腔中。
3.根据权利要求1所述一种降噪擦窗机器人,其特征在于:所述行走轮盘(3)的中心设有行走轮安装孔(31),所述步进电机(4)的电机转轴(41)插入行走轮安装孔中,实现电机转轴和行走轮盘同轴配合。
4.根据权利要求2所述一种降噪擦窗机器人,其特征在于:所述行走轮盘(3)的数量是2个,分别是并列设置的第一行走轮盘(301)和第二行走轮盘(302);所述步进电机(4)的数量是2个,分别是并列设置的第一步进电机(401)和第二步进电机(402);第一步进电机连接第一行走轮盘并驱动第一行走轮盘旋转,第二步进电机连接第二行走轮盘并驱动第二行走轮盘旋转。
5.根据权利要求2所述一种降噪擦窗机器人,其特征在于:所述安装槽(11)内设有并列设置的2个安装槽通孔(12),安装槽通孔内设有步进电机安装座(13),步进电机安装座和安装槽通孔的边缘通过若干根肋条(14)连接,若干根肋条绕步进电机安装座的边缘环形阵列布置;所述步进电机(4)固接步进电机安装座。
6.根据权利要求5所述一种降噪擦窗机器人,其特征在于:所述安装槽通孔(12)是圆形。
7.根据权利要求4所述一种降噪擦窗机器人,其特征在于:还包括电池模组(5)和控制系统(7),电池模组连接所述步进电机(4),电池模组和步进电机分别连接控制系统。
8.根据权利要求7所述一种降噪擦窗机器人,其特征在于:还包括与所述底座(1)连接的上盖,底座和上盖形成底座安装腔,所述电机罩(2)、所述电池模组(5)、所述控制系统(7)设于安装腔中。
9.根据权利要求7所述一种降噪擦窗机器人,其特征在于:所述电池模组(5)是蓄电池组。
10.根据权利要求9所述一种降噪擦窗机器人,其特征在于:所述电池模组(5)包含有电量感测模组。
技术总结本技术公开了一种降噪擦窗机器人,包括底座、设于底座底面的至少2个行走轮盘和连接行走轮盘的至少2个步进电机;行走轮盘和步进电机数量相同,且所述至少2个行走轮盘和所述至少2个步进电机一一对应连接。本技术采用以上结构,有效减少噪音,且装配模块化,结构简单,有效的降低整机功率,更适应于无线机器工作。技术研发人员:张丰,何虹均受保护的技术使用者:东莞市昱婕智能科技有限公司技术研发日:20230512技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240615/64779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表