在既有建筑物结构单侧抬升既有建筑物的自平衡装置及方法与流程
- 国知局
- 2024-07-10 17:50:49
本发明涉及建筑物抬升技术,具体为在既有建筑物结构单侧抬升既有建筑物的自平衡装置及方法。
背景技术:
1、建筑物抬升技术是指在保留原有建筑物结构的基础上,通过工程技术手段提升建筑物的整体高度,以适应城市规划、基础设施建设、地质灾害防治等需求的一种建筑工程技术。建筑物抬升技术的应用可以提高城市土地利用效率,保护历史建筑,减少因地基沉降、地震等自然灾害导致的损失。同时,这项技术也对提升城市形象、促进经济发展具有积极作用。随着土地资源的日益紧缺,人们对建筑物使用空间需求的日益高涨,建筑物抬升技术的应用前景也越来越广阔。
2、在特种建筑工程领域,建筑物抬升技术早已出现,并且有很多成功案例。纵观这些成功案例,其抬升的技术手段主要分为以下两种:
3、第一种,利用起重设备进行抬升。该种抬升方式常采用托盘梁托住待抬升的上部结构,利用起重设备起吊托盘梁从而达到抬升的目的。然而,由于该方式的抬升装置必须在竖向结构或构件的两侧对称布置,抬升装置两侧均需要一定的操作空间,该方法受限于上部结构重量和施工场地空间的限制,常用于简单的建筑结构且需要开阔的操作空间。
4、第二种,利用千斤顶和垫块进行抬升,即采用托换法顶升建筑物。该种抬升方式的具体方法为:建筑物顶升用托盘梁系和反力支座,托盘梁和反力支座之间安置千斤顶和垫块,截断建筑物上层主体与下层结构的连接部位,利用千斤顶和垫块交替更迭使建筑物顶升到预定高度。然而,千斤顶行程有限,不能将既有建筑一次性抬升至设计高度,需要利用千斤顶和垫块交替更迭才能将建筑物抬升至预定高度,且抬升过程中无法控制上部结构的水平位移;且该方法工序繁琐,施工工期长,需要消耗大量的人力物力。
5、因此,如何能不受抬升上部结构重量及操作场地的限制,同时实现只在建筑物一侧快速且一次性抬升至设计高度仍是亟待解决的问题。
技术实现思路
1、针对上述现有抬升技术存在的问题及为了达到上述的目的,本发明提供在既有建筑物结构单侧抬升既有建筑物的自平衡装置及方法,通过千斤顶张拉钢拉杆带动支撑钢柱内套接的抬升钢柱的自平衡装置对既有建筑物进行抬升,该自平衡装置是在支撑钢柱一侧设置钢牛腿,将建筑物上部结构荷载传递给钢牛腿,在支撑钢柱的另一侧对称位置设置另一钢牛腿,通过千斤顶张拉钢拉杆带动抬升钢柱形成对称荷载,从而实现装置的自平衡。该装置实现不受抬升上部结构重量及操作场地限制的情况下一次性将建筑物抬升至设计高度,无需对称布置在竖向结构或构件的两侧,仅在竖向结构或构件的一侧即可实现抬升既有建筑物的目的,克服了传统方法必须两侧对称布置抬升装置时所需的场地缺陷,解决了传统方法抬升时上部结构易产生水平位移的隐患,并规避了传统抬升方法抬升时需要多次倒顶的工序的问题。具体技术方案如下:
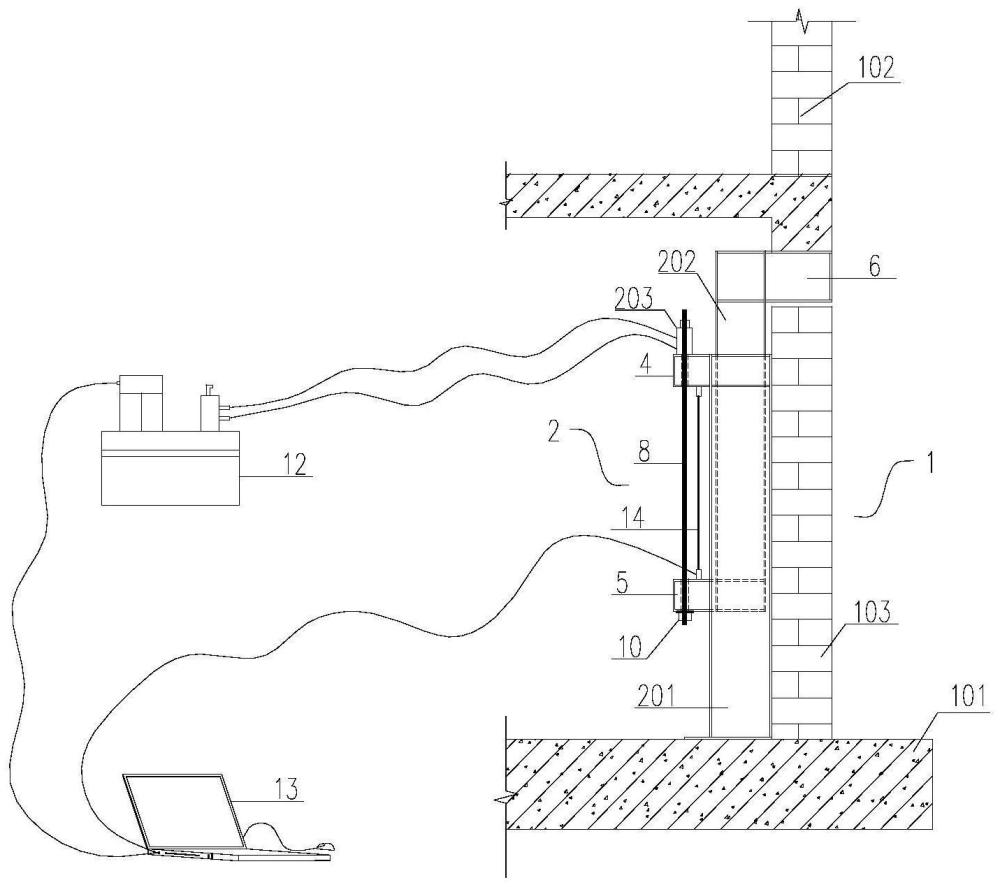
2、首先本发明提供一种在既有建筑物结构单侧抬升既有建筑物的自平衡装置,其中,所述既有建筑物包括底部的基础结构,待抬升的上部结构,以及用于安装抬升装置的下部结构;所述抬升装置包括支撑钢柱、抬升钢柱和穿心式千斤顶;特征在于:所述支撑钢柱紧邻下部结构固定于基础结构上,其为中空钢构件,且其远离下部结构一侧的侧壁上设有开口式滑槽,滑槽的顶端设有第一钢牛腿;所述抬升钢柱嵌设在支撑钢柱内,其一侧底部设有可在支撑钢柱的滑槽内上下自由滑动的第二钢牛腿,与第二钢牛腿相对的一侧顶部设有第三钢牛腿;所述既有建筑物的下部结构上设有牛腿孔,所述抬升钢柱顶部的第三钢牛腿插入所述牛腿孔内;所述穿心式千斤顶位于支撑钢柱顶端的第一钢牛腿上,其通过钢拉杆与抬升钢柱底部的第二钢牛腿相连;抬升作业时,通过穿心式千斤顶张拉钢拉杆带动抬升钢柱上升,从而实现将既有建筑物上部结构一次性抬升至设计高度。
3、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述第一钢牛腿和第二钢牛腿上均设有预留孔,所述钢拉杆自上至下依次穿过穿心式千斤顶第一钢牛腿和第二钢牛腿后,两端均通过锚具锁紧将第一钢牛腿和第二钢牛腿相连。
4、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述支撑钢柱的底部设有钢底座,用于将物抬升装置固定于既有建筑物的基础结构上。
5、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述支撑钢柱,其高度根据建筑物设计的抬升高度及既有建筑物底层操作空间高度予以确定,其截面尺寸根据待抬升的上部结构的荷载大小计算确定,计算公式为:
6、
7、式中:
8、a1为支撑钢柱的净截面面积,单位mm2;
9、n1=1.5*p,为支撑钢柱截面处轴心压力设计值,单位n;
10、p为上部结构的荷载值;
11、f1为支撑钢柱选用钢材的抗拉、抗压和抗弯强度设计值;
12、m1x、m1y为支撑钢柱截面处x轴、y轴的弯矩设计值,单位n·mm;
13、γx、γy为截面塑性发展系数;
14、w1x、w1y为支撑钢柱的净截面模量,单位mm3。
15、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述抬升钢柱,其高度根据建筑物设计的抬升高度及既有建筑物底层操作空间高度予以确定,其截面尺寸根据待抬升的上部结构的荷载大小计算确定,计算公式为:
16、
17、式中:
18、a2为抬升钢柱的净截面面积,单位mm2;
19、n2=1.5*p,为抬升钢柱截面处轴心压力设计值,单位n;
20、p为上部结构的荷载值;
21、f2为抬升钢柱选用钢材的抗拉、抗压和抗弯强度设计值;
22、m2x、m2y为抬升钢柱截面处x轴、y轴的弯矩设计值,单位n·mm;
23、γx、γy为截面塑性发展系数;
24、w2x、w2y为抬升钢柱的净截面模量,单位mm3。
25、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述穿心式千斤顶为穿心式拉伸液压自锁千斤顶,其吨位根据每个抬升点上部结构的载荷确定,取安全系数为1.5。
26、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,所述钢拉杆为钢绞线,其长度根据第一、二钢牛腿之间的距离、千斤顶的高度,锚具及两端预留长于予以确定,其截面尺寸根据所需承载的荷载大小计算确定,计算公式为:
27、
28、式中:
29、a3为钢拉杆的净截面面积,单位mm2;
30、n3为钢拉杆截面处轴心拉力设计值,单位n;
31、f3为钢拉杆选用钢材的抗拉强度设计值。
32、前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置,还包括油泵压力系统、电脑控制系统和电子位移传感器;所述电子位移传感器的上端固定于第一钢牛腿的下表面,电子位移传感器的上端固定于第二钢牛腿的上表面,用于实时检测既有建筑物上部结构的抬升高度,并将检测信号传输给电脑控制系统;所述油泵压力系统用于给穿心式千斤顶提供动力;所述电脑控制系统用于根据采集电子位移传感器的实时数据,自动分析抬升装置抬升高度的数值偏差,及时调整各油泵压力系统的压力值,确保各抬升点的垂直位移保持一致;并在上部结构抬升至设计高度时,控制各穿心式千斤顶锁定力值;在抬升作业完成后,控制各穿心式千斤顶解除力值。
33、其次,本发明还提供一种使用前述的在既有建筑物结构单侧抬升既有建筑物的自平衡装置进行既有建筑物抬升的方法,包括以下步骤:
34、a)确定抬升装置数量和抬升点:根据既有建筑物的抬升设计要求确定所需的抬升装置数量和安装位置;
35、b)开设牛腿孔:在每个抬升装置所处位置的下部结构上开设牛腿孔,所述牛腿孔的高度与大小抬升装置未抬升状态下抬升钢柱上的第二牛腿匹配;
36、c)组装抬升装置:将抬升钢柱安装于支撑钢柱的内腔中,抬升钢柱的下部钢牛腿可沿支撑钢柱开设的导向槽上下滑动;穿心式千斤顶位于支撑钢柱顶部的钢牛腿上表面,确保穿心式千斤顶的轴线同预留孔的轴线重合;将钢拉杆上端依次穿过预留孔、穿心式千斤顶后利用锚具锁紧,钢拉杆下端穿过预留孔利用锚具锁紧;
37、d)安装抬升装置:将组装好的抬升装置设置于待抬升上部结构和基础之间,其钢底座安放在基础上,确保支撑钢柱邻近下部结构,使得其上的第三钢牛腿位于牛腿孔内;
38、e)连接油泵压力系统:将穿心式千斤顶连接至油泵压力系统,并将油泵压力系统与电脑控制系统连接;
39、f)安装电子位移传感器:将电子位移传感器上端的第一传感元件固定于支撑钢柱顶部第一钢牛腿的下表面,电子位移传感器下端的第二传感元件固定于抬升钢柱下部第二钢牛腿的上表面,并将电子位移传感器连接至电脑控制系统;
40、g)顶预张:通过电脑控制系统控制油泵压力系统利用穿心式千斤顶预张拉钢拉杆,使位于牛腿孔内的第三钢牛腿与上部结构的牛腿孔上面紧密贴合;
41、h)调整电子位移传感器的初值:将电子位移传感器的初值设置为零;
42、i)截断:抬升前在牛腿孔底部平面的水平方向将竖向结构截断;
43、j)张拉:根据待抬升上部结构的荷载值,再次通过电脑控制系统向油泵压力系统发送指令,通过油泵压力系统控制穿心式千斤顶张拉钢拉杆,从而带动抬升钢柱上升从而实现上部结构的抬升;抬升过程中电脑控制系统采集电子位移传感器的实时数据,自动分析各抬升装置抬升高度的数值偏差,及时调整各油泵压力系统的压力值,确保各抬升点的垂直位移保持一致;
44、k)力值锁定:待上部结构抬升至设计高度达到设计要求后,将各抬升装置的心式千斤顶的力值锁定,完成抬升过程;
45、l)力值解除:在抬升高度范围内新增建筑结构,并待抬升高度范围内新增的建筑结构养护至设计强度后,再次通过电脑控制系统控制油泵压力系统利用穿心式千斤顶对钢拉杆进行力值解除,从而将上部结构的荷载作用于新增的建筑结构上;
46、m)移除抬升装置:将各抬升点的抬升装置拆除,并按照设计要求对抬升前开设的牛腿孔进行封堵,施工完毕。
47、作为优选的技术方案的,步骤h)中,所述调整电子位移传感器的初值,还包括根据抬升高度设置电子位移传感器的位移级数和每级位移值;所述每级位移值不超过0.5mm。
48、本发明具备的有益效果如下:
49、首先,本发明抬升装置,结构设计合理,力流路径明确,抬升行程大,自动化程度高,精度高且全过程智能化控制,既有建筑抬升时可将上部结构快速且一次性抬升至设计高度。且本发明装置所有部件可重复拆装使用,结构简单易于操作,降低了劳动强度,工作效率得到显著提升,有利于控制项目成本且大幅缩短了施工工期,可广泛用于既有建筑物抬升改造工程,特别适用于受施工场地限制的特定工程。
50、其次,本发明方法无需对称布置在竖向结构或构件的两侧,仅在竖向结构或构件的一侧即可实现抬升的目的;且本发明方法不受上部结构重量及操作场地的限制,避免了传统方法必须两侧对称布置抬升装置时所需的场地问题,解决了传统方法抬升时结构易产生水平位移的隐患,规避了传统抬升方法抬升时需要多次倒顶的工序,简化了施工流程,节省了大量的人力物力;且该方法适用于既有建筑房屋的增层改造,建筑物使用功能的提升,古建筑保护等工程,具有良好的应用价值和经济效益。
本文地址:https://www.jishuxx.com/zhuanli/20240615/65159.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表