一种基于智能末端控制器的康复训练迈步机的制作方法
- 国知局
- 2024-07-11 16:00:21
本发明属于康复器械,涉及一种基于智能末端控制器的康复训练迈步机。
背景技术:
1、神经损伤或骨骼损伤造成的偏瘫病人在康复过程中面临着步态障碍和运动功能恢复的挑战。传统的康复训练方式受限于人工操作,难以满足患者的个性化需求,且进度缓慢。因此,开发一种智能机器人辅助步态训练系统具有重要意义。近年来,该技术与领先的诊所和大学合作得到了极大的改进。如今,机器人辅助治疗已成为神经康复中不可或缺的工具。无数研究证实了基于末端执行器的步态疗法与传统疗法相比的临床证据。在诊所和医疗实践中,步态训练器的使用大幅提高了步态康复效率,大幅降低了成本,减轻了治疗师的工作负担,并帮助患者更有效和有目的地独立行走。
2、目前步态康复领域有两种治疗方法:
3、1.利用外骨骼和跑台从上到下(从髋关节到踝关节)带动病人下肢关节,进行康复训练(如lokomat系统);
4、2.采用末端执行器设计原理,由下而上带动踝关节、膝关节、髋关节,进行康复训练(如reha系统)。
5、由于类reha系统相对于外骨骼康复系统,更符合下肢行走生理特征,康复效果更好,因此被更广泛应用。
6、末端执行器设计原理:踝关节对下肢行走起着至关重要的作用,人体行走的第一动力来自踝关节与地面产生的摩擦力推动身体前进。末端驱动设计,有助于患者在摆动时主动发力,而主动运动是获得步态的一个关键因素,同时也获得位置感觉。末端驱动的功能相当于杠杆原理,能最大化调动参与运动的肌肉、筋膜、神经、骨骼、血管等组织,相比于外骨骼机器人能够最大化调动身体机能,其优势在于更符合人类闭链运动的步行特点,给患者髋、膝关节的自由度比较高,利于患者步态康复训练。
7、目前迈步机上使用的末端执行器对于脚踝的控制,有些仅仅是采用压力传感器来采集脚和踏板之间的力,不足以对脚踝进行多方位精准地控制。如何有效地处理和分析从患者身上收集的大量数据,以提取有意义的特征,对于提高康复效果至关重要。传统的数据处理方法往往难以适应不同患者的个性化需求和复杂多变的康复环境,因此需要一种基于力反馈和自适应算法的数据处理和特征提取系统。
8、因此,有必要对现有技术予以改良以克服现有技术中的缺陷。
技术实现思路
1、本发明目的是提供一种基于力反馈和自适应算法的智能康复训练迈步机,本迈步机同时具备数据处理与特征提取能力,能够自动地处理和分析从患者身上收集的数据,提取出与康复过程密切相关的特征,并为后续的模型训练和自适应调整提供准确的数据输入。
2、本发明目的是通过以下技术方案实现:
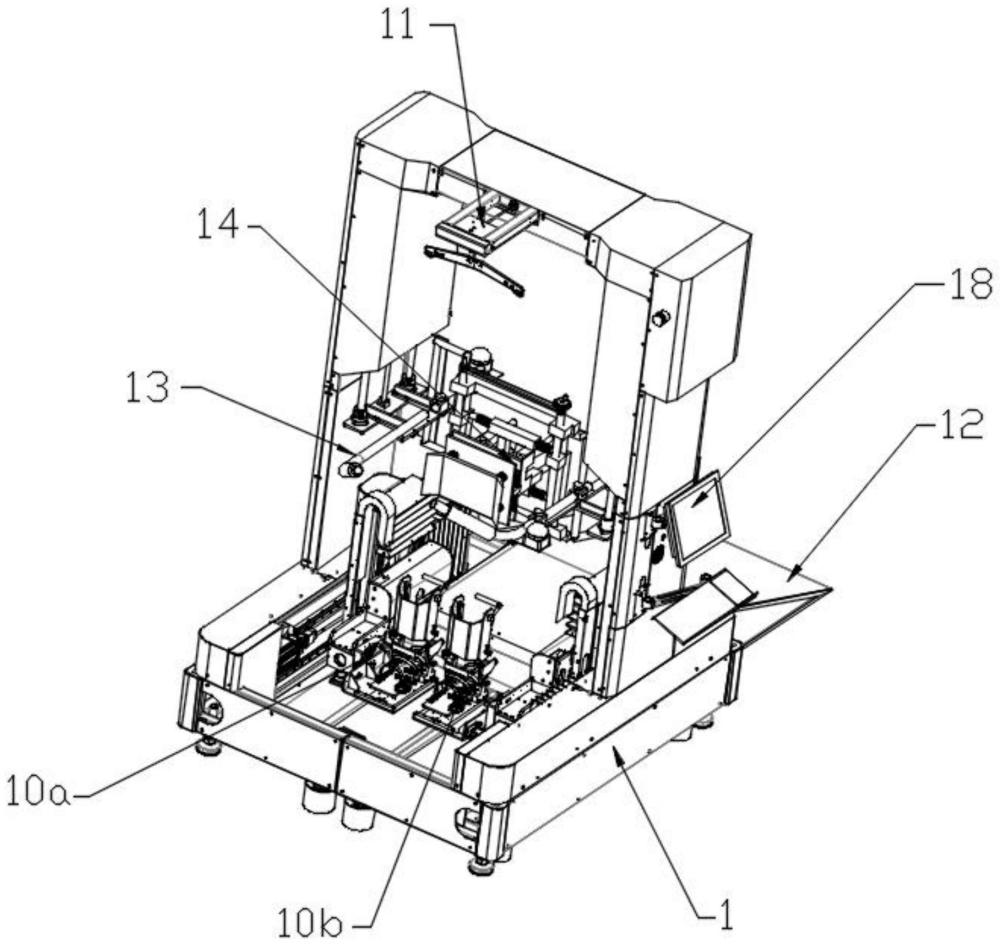
3、一种基于智能末端控制器的康复训练迈步机,包括机架,所述机架上设有两组受驱动的可控的智能末端控制器,所述机架上设有将患者上身吊起的减重机构;所述机架上设有防止患者训练时重心不稳摔倒的防跌倒保护装置;所述机架外侧设有交互式显示屏和电控箱组件;
4、所述智能末端控制器包括调节板和支撑板,所述调节板、支撑板之间设有六维力传感器,所述调节板上设有陀螺仪;所述调节板在驱动机构的带动下能够平移、升降、旋转的移动;
5、所述智能末端控制器的轨迹,根据标准步态的各个关节角度曲线,用dh参数算法获得。创建人体下肢关节转换矩阵,dh参数如下:
6、定义坐标系:每个关节(髋关节,膝关节,踝关节)都有一个坐标系,描述该关节的旋转和平移;
7、分配dh参数:每个关节,分配四个dh参数,分别为:
8、a:关节沿着前一个关节x轴的平移距离;
9、α:关节绕着前一个关节x轴的旋转角度;
10、d:关节沿着当前关节z轴的平移距离;
11、θ:关节绕着当前关节z轴的旋转角度;
12、将相邻两个关节的坐标系相互转换(即通过将每个关节的转换矩阵相乘),可以计算出整个关节链的正运动学,从而分析关节的运动和末端控制器的位置的关系;转换矩阵t的计算公式如下:
13、
14、其中,a、α、d和θ分别是每个关节的dh参数。
15、进一步来说,所述六维力传感器的放置位置位于脚踝关节的正下方,便于测定病人在行走时,脚步用力情况,从而为主动训练模式提供数据。
16、在一个实施例中,所述支撑件上设置有可拆卸的高度调节的膝部支撑。当患者的腿部支撑力量较弱时,加装膝部支撑能防止裸关节弯曲角度过大。
17、进一步来说,所述智能末端控制器的控制通过脚踝部位的伺服电机,采用增量式pid位置控制,其计算公式如下:
18、δu(t)=kp(e(t)-e(t-1))+kie(t)+kd(e(t)-2e(t-1)+e(t-2))
19、其中:δu为控制量在t时刻的增量;e(t)为t时刻期望角度和实际角度的差值;e(t-1)为t-1时刻的期望角度和实际角度之差;e(t-2)为t-2时刻的期望角度和实际角度之差;kp,ki,kd为可调节的参数。
20、进一步来说,所述智能末端控制器的行走轨迹控制通过平移伺服电机和垂直伺服电机,采用自适应阻抗模型算法实现:
21、我们的系统可以用如下公式表示:
22、其中f表示电机输出的力;
23、变化公式为
24、
25、公式中fe可以从六维力传感器中获得;
26、为期望位置和实际位置之差,可以从系统的电机中获得;
27、为的一阶导;
28、为的二阶导。
29、m自适应正定虚拟质量,b自适应阻尼,k自适应刚度为自适应参数,其自适应公式为
30、m=m+αm*f
31、b=b+αb*f
32、k=k+αk*f
33、其中m,b,k为阻抗系数,αm,αb,αk为自适应参数的权重系数,f为六维力传感器上的总力。
34、进一步来说,所述驱动机构包括平移驱动机构、升降驱动机构和旋转驱动机构,所述调节板在旋转驱动机构的带动下摆动翻转模拟脚踝运动,平移驱动机构能带动升降驱动机构整体前后移动,所述升降驱动机构能带动旋转驱动机构及调节板整体上下移动。
35、进一步来说,所述减重机构内设有监测绳索拉力的拉力传感器和感应绳索实际伸出长度的拉线编码器。
36、进一步来说,所述防跌倒保护装置包括升降扶手机构、腰托机构和急停按钮;所述腰托机构的一端枢轴连接在机架上,其上具有镂空结构的空腔,所述空腔处设有三轴方向减振的缓冲组件,所述腰托支架上设有驱动缓冲组件垂直上下移动的升降组件;所述缓冲组件上具有第一支撑板,所述第一支撑板的外侧设置有浮动支撑板,所述浮动支撑板的外侧面为仿形结构,所述第一支撑板与浮动支撑板之间设有万向缓冲组件。
37、进一步来说,所述机架上设有轮椅对接平台。与腰托机构配合,患者可乘坐轮子在外人的陪护下移动至基于智能末端控制器的康复训练迈步机的锻炼位置,方便患者快速方便上下迈基于智能末端控制器的康复训练迈步机。
38、采用上述技术方案,具有以下有益效果:
39、1.基于智能末端控制器的康复训练迈步机具备被动训练,主动训练和阻抗训练模式。被动训练模式适合不能迈步的病人,主动训练模式适合能迈步但迈步姿势异常的病人,阻抗训练模式适合迈步姿势标准但力量不够的病人。对于不同阶段的病人采用不同的训练模式,能满足不同病人训练需求。
40、2.基于智能末端控制器的康复训练迈步机采用力反馈和自适应阻抗模型算法,这一创新性设计在提高行走障碍病人康复训练效果方面具有显著优势:
41、首先,通过六维力传感器实时监测患者的运动和与地面的相互作用力,系统能够迅速捕捉患者的动态变化,为后续控制提供准确的反馈数据。
42、力反馈的引入使得康复训练更接近正常人体行走生理功能,患者在模拟行走过程中能够感受到地面的阻力和反作用力,从而更好地激发肌肉群的活动。这种仿真的感觉不仅提高了康复训练的生动性,还帮助患者快速恢复对腿部关节和肌肉的自然控制能力。
43、其次,采用自适应阻抗模型算法的智能末端控制器能够根据患者的个体差异和康复进展进行实时调整。这种个性化的康复方案有助于更有效地满足患者的特定需求,提供更贴合其康复进程的训练计划。自适应阻抗模型算法使系统能够更灵活地适应患者的生理状态,从而最大程度地提高康复训练的效果。
44、总的来说,采用力反馈和自适应阻抗模型算法的智能末端控制器不仅提供了更真实的康复体验,同时根据患者的个体差异实现了个性化的康复训练。这种技术的应用为行走障碍患者创造了更贴近自然状态的康复环境,有望在提高康复效果的同时增强患者的康复动力。
本文地址:https://www.jishuxx.com/zhuanli/20240615/76955.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表