一种便携式登杆装置的制作方法
- 国知局
- 2024-07-11 16:08:50
本技术涉及登杆作业工具,具体为一种便携式登杆装置。
背景技术:
1、脚扣式登杆器和踏板式登高板爬杆是目前电力行业最常见的两种登杆作业工具。登杆器虽然结构简单但对使用者的技术经验有极高要求,使用过程中需要使用者将卡钩从电线杆上短时脱离,仅凭一只脚受力容易发生危险,对使用者的人身安全造成一定威胁。而如果长时间使用的话,重力主要集中在使用者的其中一只脚上,极易造成使用者的脚部疲劳,使脚扣在检修时容易脱落,造成一定安全隐患。
2、登高板爬杆则需要使用者经长时间的练习、训练并拥有较强的身体素质才能支撑身体完成上杆,容易因检修人员的体力不支而影响了检修进度。同时登高板常年使用后绳子或连接处容易出现线磨损,造成安全隐患。
3、当前配电线路规模越来越大,支线也越来越多,在供电服务的压力下,停电机会越来越少,导致一次运维工作量陡增。运维人员无论是使用脚扣式登杆器还是登高板爬杆都会因重复攀爬而消耗大量体力,加大了发生事故的概率。
技术实现思路
1、针对上述情况,本实用新型提供了一种便携式登杆装置,通过设置坐式登杆和脚踏登杆并由单片机、信号收发器、压力传感器等电子元器件组成控制系统对这两组登杆进行控制,使得检修人员通过控制坐式登杆和脚踏登杆上下配合移动来完成登杆检修工作。本装置操作简单,无需操作人员进行长时间专业训练后才能使用,亦无需操作人员具有较强的身体素质和丰富的上杆经验才能完成上杆,有效解决了背景技术中提到的问题。
2、本实用新型的技术方案如下:
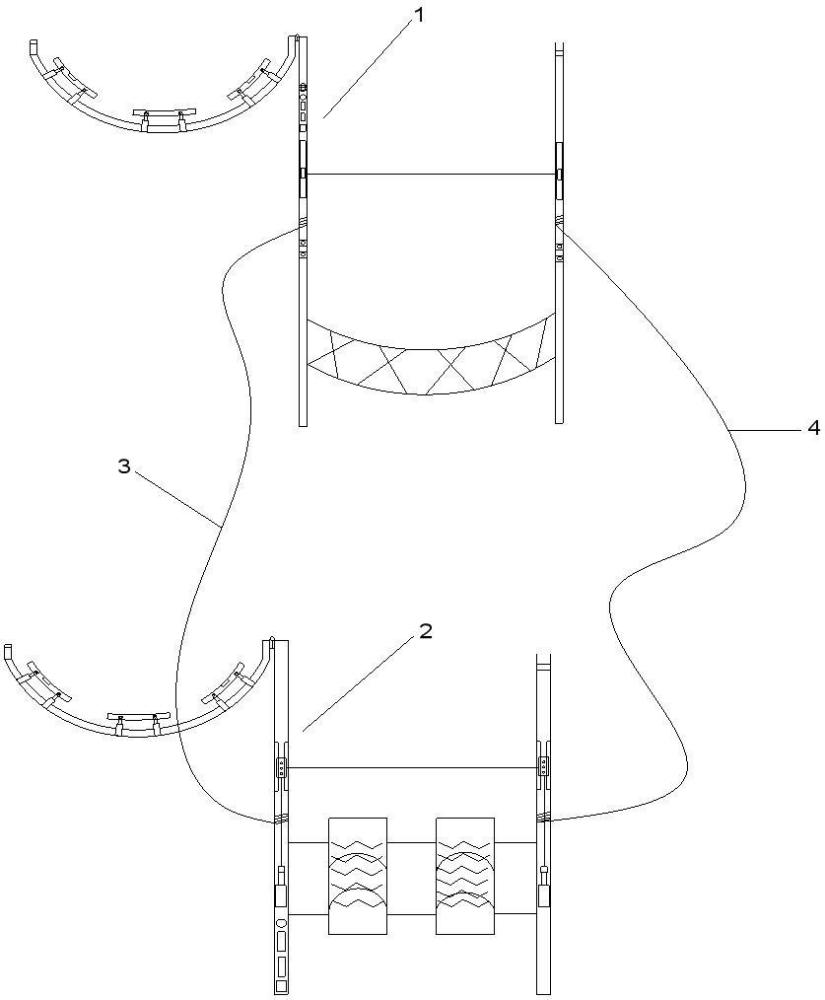
3、1、一种便携式登杆装置,其特征在于:包括坐式登杆(1)、脚踏登杆(2)以及登杆控制系统,所述坐式登杆(1)的左侧经第一伸缩带(3)与脚踏登杆(2)的左侧连接,所述坐式登杆(1)的右侧经第二伸缩带(4)与脚踏登杆(2)的右侧连接;
4、所述坐式登杆(1)包括第一支撑杆(5)和第二支撑杆(6),所述第一支撑杆(5)的顶端经第一合页(30)与第一半圆管(23)连接,所述第一半圆管(23)的另一端焊接有第一连接块(26),所述第一连接块(26)的另一端设置有第一横向螺纹孔(27),所述第一半圆管(23)中间设置有第一自动调节组件(21),所述第一自动调节组件包括第一电动推杆(18)和第二电动推杆(19),所述第一电动推杆(18)经圆孔安装在第一半圆管(23)内,所述第二电动推杆(19)经圆孔安装在第一半圆管(23)内,所述第一电动推杆(18)的伸缩端和第二电动推杆(19)的伸缩端连接有方形防滑橡胶块,所述第一自动调节组件(21)的左右两侧分别设置有第二自动调节组件(22)和第三自动调节组件(20),所述第二自动调节组件(22)和第三自动调节组件(20)与第一自动调节组件(21)的结构相同,所述第二自动调节组件(22)的方形防滑橡胶块上还设置有第一压力传感器(24),所述第三自动调节组件(20)的方形防滑橡胶块上还设置有第二压力传感器(25),所述第一支撑杆(5)的中部设置有第一卡槽(8),所述第一卡槽(8)上安装有第一机械按钮(9),所述第二支撑杆(6)的中部设置有第二卡槽(10),所述第二卡槽(10)上安装有第二机械按钮(11),所述第一卡槽(8)与第二卡槽(10)之间设置有第一横杆(7),所述第一横杆(7)的两端分别被第一机械按钮(9)、第二机械按钮(11)卡住,所述第二支撑杆(6)的顶端为开口设计,开口下方设置有第二横向螺纹孔(28),当第一连接块(26)经顶端开口插入第二支撑杆(6)时,所述第一横向螺纹孔(27)的圆心与第二横向螺纹孔(28)的圆心位于同一水平线上且两个螺纹孔的直径大小一致,此时第一螺栓(31)穿过第一横向螺纹孔(27)、第二横向螺纹孔(28)将第一半圆管(23)与第二支撑杆(6)锁紧,所述第一支撑杆(5)和第二支撑杆(6)之间还连接有网兜(29);
5、同时按下第一机械按钮和第二机械按钮,第一横杆跳出卡槽,这时工作人员双手将第一机械按钮和第二机械按钮向前推或向后拉,就会带动第一横杆向前或向后移动即贴近电线杆或远离电线杆。移动原理与美工刀的工作原理类似。
6、所述脚踏登杆(2)包括第三支撑杆(33)和第四支撑杆(34),所述第三支撑杆(33)的顶端经第二合页(58)与第二半圆管(52)连接,所述第二半圆管(52)的另一端焊接有第二连接块(53),所述第二连接块(53)的另一端设置有第三横向螺纹孔(54),所述第二半圆管(52)中间设置有第四自动调节组件(51),所述第四自动调节组件(51)包括第七电动推杆(45)和第八电动推杆(46),所述第七电动推杆(45)经圆孔安装在第二半圆管(52)内,所述第八电动推杆(46)经圆孔安装在第二半圆管(52)内,所述第七电动推杆(45)的伸缩端和第八电动推杆(46)的伸缩端连接有方形防滑橡胶块,所述第四自动调节组件(51)的左右两侧分别设置有第五自动调节组件(55)和第六自动调节组件(56),所述第五自动调节组件(55)和第六自动调节组件(56)与第四自动调节组件(51)的结构相同,所述第五自动调节组件(55)的方形防滑橡胶块上还设置有第三压力传感器(68),所述第六自动调节组件(56)的方形防滑橡胶块上还设置有第四压力传感器(69),所述第四支撑杆(34)的顶端为开口设计,开口下方设置有第四横向螺纹孔(57),当第二连接块(53)经顶端开口插入第四支撑杆(34)时,所述第三横向螺纹孔(54)的圆心与第四横向螺纹孔(57)的圆心位于同一水平线上且两个螺纹孔的直径大小一致,此时第二螺栓(59)穿过第三横向螺纹孔(54)、第四横向螺纹孔(57)将第二半圆管(52)与第四支撑杆(34)锁紧;
7、所述第三支撑杆(33)中部设置有第一滑轨(36),所述第一滑轨(36)上安装有第一滑块(37),所述第四支撑杆(34)中部设置有第二滑轨(39),所述第二滑轨(39)上安装有第二滑块(38),所述第一滑块(37)与第二滑块(38)位于同一水平线且两块滑块之间焊接有第二横杆(35),所述第三支撑杆(33)上还安装有第一伸缩电机(47),所述第一伸缩电机(47)的输出轴经第一万向节联轴器(48)与第一连接杆(16)连接,所述第一连接杆(16)的另一端与第一滑块(37)焊接,所述第四支撑杆(34)上安装有第二伸缩电机(49),所述第二伸缩电机(49)的输出轴经第二万向节联轴器(50)与第二连接杆(17)连接,所述第二连接杆(17)的另一端与第二滑块(38)焊接,所述第三支撑杆(33)和第四支撑杆(34)之间还焊接有第三横杆(43)和第四横杆(44),所述第三横杆(43)和第四横杆(44)焊接有左脚踏板(40)和右脚踏板(41),每一块所述脚踏板上设置有两根固定绳(42);
8、滑块下面安装有滑轮,使得滑块可以在滑轨上滑动。
9、所述登杆控制系统包括坐式登杆控制系统和脚踏登杆控制系统,所述坐式登杆控制系统包括第一信号处理模块u1,所述第一信号处理模块u1的5v电源端与第一直流电源v1的正极连接,所述第一信号处理模块u1的数据接收引脚d0/rx与第二信号处理模块u2的数据发送引脚d1/tx连接,所述第一信号处理模块u1的数据发送引脚d1/tx与第二信号处理模块u2的数据接收引脚d0/rx连接,所述第一信号处理模块u1的第2引脚d2经第三机械开关b3接地,所述第一信号处理模块u1的第6引脚d6pwm与第一信号收发器q1的信号输出端out接,所述第一信号收发器q1的电源端vcc与第一直流电源v1的正极连接,所述第一信号收发器q1的接地端gnd接地,所述第一信号处理模块u1的第8引脚d8与蜂鸣器s1的正输入端连接,所述蜂鸣器s1的负输入端与第一直流电源v1的负极连接,所述第一信号处理模块u1的第10引脚d10经第一机械开关b1与第一直流电源v1的正极连接,所述第一信号处理模块u1的第12引脚d12/miso经第二机械开关b2与第一直流电源v1的正极连接,所述第一信号处理模块u1的第13引脚d13/sck经第四机械开关b4、第一电阻r1与第一直流电源v1的负极连接,所述第一信号处理模块u1的第一模拟信号输入端a0与第一压力传感器l1的信号输出端out连接,所述第一压力传感器l1的电源端vcc与第一直流电源v1的正极连接,所述第一压力传感器l1的接地端gnd接地,所述第一信号处理模块u1的第三模拟信号输入端a2与第二压力传感器l2的信号输出端out连接,所述第二压力传感器l2的电源端vcc与第一直流电源v1的正极连接,所述第二压力传感器l2的接地端gnd接地,所述第一信号处理模块u1的接地端gnd接地,所述第一信号处理模块u1的其余引脚空置;
10、所述第二信号处理模块u2的5v电源端与第一直流电源v1的正极连接,所述第二信号处理模块u2的第4引脚d4与第一电动推杆m1的驱动信号输入端in连接,所述第二信号处理模块u2的第5引脚d5与第二电动推杆m2的驱动信号输入端in连接,所述第二信号处理模块u2的第8引脚d8与第三电动推杆m3的驱动信号输入端in连接,所述第二信号处理模块u2的第9引脚d9pwm与第四电动推杆m4的驱动信号输入端in连接,所述第二信号处理模块u2的第10引脚d10pwm与第五电动推杆m5的驱动信号输入端in连接,所述第二信号处理模块u2的第11引脚d11与第六电动推杆m6的驱动信号输入端in连接,所述第一电动推杆m1至第六电动推杆m6的电源正输入端v+分别与第一直流电源v1的正极连接,所述第一电动推杆m1至第六电动推杆m6的电源负输入端v-分别与第一直流电源v1的负极连接,所述第二信号处理模块u2的接地端gnd接地,所述第二信号处理模块u2的其余引脚空置;
11、第一自动调节组件(21)的两根电动推杆分别是第一电动推杆m1和第二电动推杆m2,第二自动调节组件(22)的两根电动推杆分别是第三电动推杆m3和第四电动推杆m4,第三自动调节组件(20)的两根电动推杆分别是第五电动推杆m5和第六电动推杆m6。
12、所述脚踏登杆控制系统包括第三信号处理模块u3,所述第三信号处理模块u3的5v电源端与第二直流电源v2的正极连接,所述第三信号处理模块u3的数据接收引脚d0/rx与第四信号处理模块u4的数据发送引脚d1/tx连接,所述第三信号处理模块u3的数据发送引脚d1/tx与第四信号处理模块u4的数据接收引脚d0/rx连接,所述第三信号处理模块u3的第3引脚d3与第一伸缩电机y1的驱动信号输入端in连接,所述第一伸缩电机y1的电源正输入端v+与第二直流电源v2的正极连接,所述第一伸缩电机y1的电源负输入端v-与第二直流电源v2的负极连接,所述第三信号处理模块u3的第6管脚d6pwm与第二信号收发器q2的信号输出端out连接,所述第二信号收发器q2的电源端vcc与第二直流电源v2的正极连接,所述第二信号收发器q2的接地端gnd接地,所述第三信号处理模块u3的第13引脚d13/sck与第二伸缩电机y2的驱动信号输入端in连接,所述第二伸缩电机y2的电源正输入端v+与第二直流电源v2的正极连接,所述第二伸缩电机y2的电源负输入端v-与第二直流电源v2的负极连接,所述第二信号处理模块u2的第一模拟信号输入端a0与第三压力传感器l3的信号输出端out连接,所述第三压力传感器l3的电源端vcc与第二直流电源v2的正极连接,所述第三压力传感器l3的接地端gnd接地,所述第二信号处理模块u2的第三模拟信号输入端a2与第四压力传感器l4的信号输出端out连接,所述第四压力传感器l4的电源端vcc与第二直流电源v2的正极连接,所述第四压力传感器l4的接地端gnd接地,所述第二信号处理模块u2的接地端gnd接地,所述第二信号处理模块u2的其余引脚空置;
13、所述第四信号处理模块u4的5v电源端与第二直流电源v2的正极连接,所述第四信号处理模块u4的第4引脚d4与第七电动推杆m7的驱动信号输入端in连接,所述第四信号处理模块u4的第5引脚d5与第八电动推杆m8的驱动信号输入端in连接,所述第四信号处理模块u4的第8引脚d8与第九电动推杆m9的驱动信号输入端in连接,所述第四信号处理模块u4的第9引脚d9pwm与第十电动推杆m10的驱动信号输入端in连接,所述第四信号处理模块u4的第10引脚d10pwm与第十一电动推杆m11的驱动信号输入端in连接,所述第四信号处理模块u4的第11引脚d11与第十二电动推杆m12的驱动信号输入端in连接,所述第七电动推杆m7至第十二电动推杆m12的电源正输入端v+分别与第二直流电源v2的正极连接,所述第七电动推杆m7至第十二电动推杆m12的电源负输入端v-分别与第二直流电源v2的负极连接,所述第四信号处理模块u4的接地端gnd接地,所述第四信号处理模块u4的其余引脚空置。
14、第四自动调节组件(51)的两根电动推杆分别是第七电动推杆m7和第八电动推杆m8,第五自动调节组件(55)的两根电动推杆分别是第九电动推杆m9和第十电动推杆m10,第六自动调节组件(56)的两根电动推杆分别是第十一电动推杆m11和第十二电动推杆m12。
15、所述信号处理模块均为单片机。
16、进一步的,所述脚踏板上设置有防滑纹。
17、进一步的,所述蜂鸣器s1(64)、第一信号收发器q1(65)、第一信号处理模块u1(66)、第二信号处理模块u1(62)、第一直流电源v1(67)依次安装在第一支撑杆(5)上,位于第一卡槽(8)的上方,所述第一机械开关b1(12)、第二机械开关b2(13)依次安装在第一支撑杆(5)上,位于第一卡槽(8)与网兜(29)之间,所述第三机械开关b3(14)、第四机械开关b4(15)依次安装在第二支撑杆(6)上,位于第二卡槽(10)与网兜(29)之间。
18、其中,第一机械开关b1为坐式登杆控制系统的启动按钮(12),第二机械开关b2为坐式登杆控制系统的停止按钮(13),第三机械开关b3为脚踏登杆控制系统的启动按钮(14),第四机械开关b4为脚踏登杆控制系统的停止按钮(15),方便工作人员左右手控制。
19、进一步的,所述第二信号收发器q2(61)、第三信号处理模块u3(60)、
20、第四信号处理模块u4(70)、第二直流电源v2(63)依次安装在第三支撑杆(33)上,位于第一伸缩电机(47)的下方。
21、综上所述,由于采用了上述方案,本实用新型具有以下优点:
22、(1)本实用新型一种便携式登杆装置,坐式登杆和脚踏登杆的自由调节组件均能由操作人员自由精准控制,使得坐式登杆和脚踏登杆更加贴合电线杆,通过增加与电线杆的接触面积从而增大了摩擦力,而且操作人员只需按下开关按钮即可,与现有登杆设备相比,无需过多手动调节,极大地降低了安全隐患,保证了操作人员的安全。
23、(2)本实用新型一种便携式登杆装置,操作方便简单,安全可靠,无需操作人员进行长时间专业训练后才能使用,亦无需操作人员具有较强的身体素质和丰富的上杆技术经验才能完成上杆,适用人群更广。
24、(3)本实用新型一种便携式登杆装置,坐式登杆和脚踏登杆均能够锁死在电线杆上,较大地提高了安全性,更方便检修人员上杆后双脚平稳站立工作,避免其中一只脚承受过多重力,而且设置有网兜,方便操作人员检修过程中进行短暂休息,有效缓解了操作人员的脚部疲劳,特别适合目前一次运维工作量较大的情况,有效减少了操作人员的体能损耗,避免操作人员出现体力不支的状况,降低了事故发生的概率。
25、(4)本实用新型设计科学、结构合理、安全可靠、操作简单,所需电子元器件、机械零部件等材料均可通过市场常规渠道购得,具有大规模生产及推广应用的前景。
本文地址:https://www.jishuxx.com/zhuanli/20240615/77718.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表