一种全向移动平台的制作方法
- 国知局
- 2024-07-11 16:14:18
本发明属于锻炼设备,涉及一种全向移动平台,该平台允许人在任何方向上行走,同时平台将人大致保持在中心位置。
背景技术:
1、在现有的vr领域和康复训练领域,多数的跑步机只能实现前后的移动,不能360度全方向移动,限制了用户的体验效果和康复效果。使用者需要一种真实、自然、全方向的移动方式来增强沉浸感。传统的移动平台通常采用固定或限制性移动方式,例如传送、瞬移或线性滑行,这在一定程度上影响了用户的体验和参与度。
2、虽然市场上已经存在一些全向移动平台,但它们通常存在移动效率低、结构复杂体积庞大等问题。如为了模拟全向运动,已经提出了几种类型的设备,如国承壹号、暗黑行者、infinadeck…等等。然而,这些设备在全向行走方面也有局限性。这些设备中,有的利用惯性滑动实现全向运动,有的利用特殊履带和驱动实现全向运动。利用惯性滑动实现的全向平台,由于弧度的关系,行走体验不象平地行走的感觉。而利用特殊履带的全向移动平台,由于负载大和传动效率低等问题,局限了移动平台的应用场景。利用履带的全向跑步机,最常见的方式就是:y轴的平移运动由每段同步带的y方向的旋转电机驱动,x轴的平移运动是由所有单元段沿着x方向的旋转电机驱动,因此2d跑步机结合了正交组装的小型跑步机,创建了一个单一的大型跑步机。由此通过沿两个正交轴(x和y)产生独立的带运动来提供一个无限的平面。y轴的平移运动是由直接连接在每个单元段上的单个执行器产生的。这增加了每个单元段的惯性;因此,这种设计需要非常大的功率来旋转所有的单元段。随着每个单元段重量的增加,x轴的加速度大大降低。
3、因此,现有的全向跑步机存在在y轴方向的动力传输效率低下,且x轴方向的单元段重量过大,导致加速性能大幅降低。这些问题成为了开发快速自然运动的沉浸式虚拟环境的主要障碍。
4、因此,有必要对现有技术予以改良以克服现有技术中的缺陷。
技术实现思路
1、本发明的目的在于提供一种全向移动平台(又称为全方向跑步平台),通过新的动力传输机制和运动控制,实现了用户全向移动和自然交互的能力,可用于增强各种虚拟现实环境中的沉浸式体验和康复训练。
2、本发明的目的是通过以下技术方案实现:
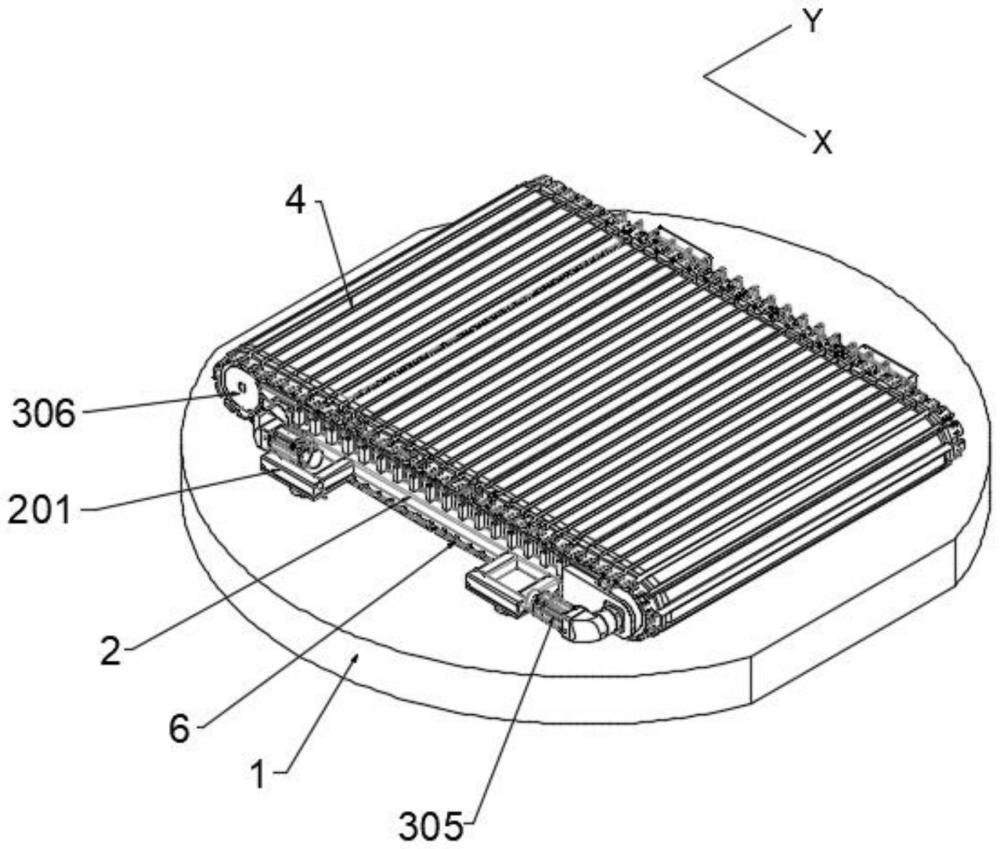
3、一种全向移动平台,包括框架,所述框架上设置有纵向循环轨道,横向移动模块的两端固定在所述纵向循环轨道上并能跟随纵向循环轨道移动;所述横向移动模块包括横移支架,所述横移支架上设置有横向循环轨道,所述横向循环轨道的内侧面为柔性齿带结构;所述横向循环轨道下方所在的框架上设有第一驱动机构,所述第一驱动机构包括至少一组传动轴组件,所述传动轴组件上设置有与其上方的横向循环轨道摩擦接触的全向轮,所述横移支架上枢轴连接有至少一个与柔性齿带结构啮合的传动齿轮,所述传动齿轮与全向轮上下对应并共同带动横向循环轨道移动。
4、在一个实施例中,所述传动齿轮的两侧设置有与柔性齿带结构啮合的辅助齿轮,两个辅助齿轮枢轴连接在横移支架上。
5、在一个实施例中,所述传动齿轮上方所在的横移支架上枢轴连接有一排滚轮,所述滚轮位于横向循环轨道内并与横向循环轨道的上端面接触。
6、在一个实施例中,所述传动轴组件包括传动轴,所述传动轴的前后两端通过轴承座安装在框架上,所述传动轴上若干个全向轮,所述全向轮均与一条横向循环轨道对应;所述第一驱动机构包括主动轴,所述主动轴通过轴承座安装在框架上,所述主动轴的一端与第一驱动电机连接,所述主动轴与传动轴之间通过锥齿轮传动连接。
7、在一个实施例中,所述全向轮包括轮毂以及设置在轮毂周围的若干个辊子,所述轮毂枢轴连接在所述传动轴上;所述辊子可沿其自身轴线转动;所述辊子的轴线与轮毂的轴线在空间上呈90°分布。
8、进一步来说,所述辊子的表面具有增加摩擦力的纹理结构。辊子的表面由柔软的橡胶材料制成,具有一定的抓地力和耐磨性。
9、进一步来说,所述辊子呈圆柱形结构,所述轮毂的前后两侧均设置有所述辊子,同一侧的若干个所述辊子呈圆形分布。
10、在一个实施例中,所述纵向循环轨道包括两条传动履带,所述传动履带的两端分别设有履带传动齿轮,所述履带传动齿轮通过履带传动轴枢轴连接在框架上,且其中一个所述履带传动轴的一端与第二驱动电机相连;所述横移支架的两端固定在两条传动履带的外侧端。
11、在一个实施例中,所述基台上设置有辅助滑轮组件,所述辅助滑轮组件位于两条所述传动履带的下方,所述辅助滑轮组件上的滑轮与横移支架的端部对应。
12、本技术文件的全向移动平台采用可调电源供电,该可调电源是一种交流-直流变换器,可以根据电机的需要提供不同的电压和电流。全向移动平台的控制器是一种基于单神经元自适应pid控制的控制器,可以根据传感器的信号来调节电机的速度和方向,实现快速的方向变换和速度适应。
13、本技术文件的单神经元自适应pid算法是传统pid算法的改进形式,具有自学习自适应能力,而且结构简单,易于实现。能够根据行走状态的变化,自动调整跑台的速度,具有较强鲁棒性。能克服传统控制器在控制非线性系统时随动性差的缺点。
14、神经网络采用多神经元的方式,可以任意逼近线性和非线性系统,实现常规非线性和不确定系统的控制。但神经网络存在结构、计算复杂,不利于实时控制的缺点。单神经元具有神经网络的优点,同时与pid相机结合,构成自适应pid控制器。通过对加权系数自适应、自学习的调整,实现稳定的速度控制方式。
15、由于使用者在移动平台上的行走、跑动,对移动平台的压力是不均匀且具有脉冲性质的,这就造成电机的输出不均匀,不平滑,没有很好的用户体验。我们采用单神经元自适应pid算法,来对电机的速度进行控制,能极大改善电机输出的稳定性,增强用户体验。
16、算法公式为:
17、
18、在这个公式中,我们采用有监督hebb学习规则,其中,
19、wi(t)为t时刻,第i个权重系数
20、w1(t)=w1(t-1)+αp[τr(t)-τc(t)]τ(t)e1(t) (2)
21、w2(t)=w2(t-1)+αi[τr(t)-τc(t)]τ(t)e2(t) (3)
22、w3(t)=w3(t-1)+αd[τr(t)-τc(t)]τ(t)e3(t) (4)
23、ei(t)为t时刻计算的控制器第i个输入误差量
24、e1(t)=τr(t)-τc(t) (5)
25、e2(t)=e1(t)-e1(t-1) (6)
26、e3(t)=e1(t)-2e1(t-1)+e1(t-2) (7)
27、上述各式中,
28、τ(t)为t时刻计算的控制器输出量,为电机的扭矩;
29、τ(t-1)为t-1时刻计算的控制器输出量;
30、τr是控制器输入给定值,即我们期望的伺服电机扭矩,值为0,τc为当前伺服电机的实际采样的扭力值;
31、αp为比例项学习率;
32、αi为积分项学习率;
33、αd为微分项学习率;
34、k为比例系数,且k>0。
35、在使用pid公式之前,我们需要对学习率和比例系数以及权重系数进行初始化,以保证在未修改参数的值之前,pid对象也同样可用的。初始化值如下:
36、k=0.12,αp=0.4,αi=0.35,αd=0.4,v(t-1)=0,w1(t-1)=0.1,w2(t-1)=
37、0.1,w3(t-1)=0.1,e1(t-1)=0,e1(t-2)=0。
38、至此,单神经元自适应pid算法,就可以用于控制全向移动平台x、y方向的速度,实现自由的360度移动。
39、采用上述技术方案,具有以下有益效果:通过传动齿轮与全向轮上下对应并共同带动横向循环轨道移动,减少传动过程中的噪音和振动,提高传动效率;同时减少传动部件的数量,从而提高系统的可靠性和稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240615/78267.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表