双轮收发一体式网球陪练机器人及其运行方法
- 国知局
- 2024-07-11 16:20:32
本发明属于服务机器人,涉及一种网球辅助训练装置,具体地说,涉及一种可循环收球与发球,与网球训练者进行隔网对打训练的自动化装置,具体提供一种双轮收发一体式网球陪练机器人及其运行方法。
背景技术:
1、网球作为一项兼具趣味性和竞技性的体育运动项目,深受各个年龄段的运动群体喜爱,网球爱好者群体与日俱增。然而,网球运动入门门槛高、技术环节多,网球教练与陪练费用较高,现有训练装备智能化程度低,导致网球训练的科学性、普及性与效率受限。
2、网球训练是一个人-机-球组成的人机交互问题。应用智能化训练装备并构建科学的人机交互训练模式,将极大程度节约训练时间和费用成本。网球发球机作为成熟且应用广泛的设备,能够有效控制不同的喂球落点,但其出球位置固定且工作过程常需配备上百个网球,一轮训练结束后还要收球并重新填充网球。现有的网球机器人主要用于配合发球机工作,实现自动化捡球功能;近年来,为模拟与专业陪练多球连续性对打效果,出现了一些初步具备接发球特性的网球机器人,但仍存在不足而有待优化提升。
3、申请号为2018163353.3的专利提出了一种网球接发球机器人,接球装置收集到网球后通过输球装置和推送装置将网球输送至发球装置并实现不同速度和角度击发。其优点是收集效率高、击发效果好;缺点是无法进行智能定向移动,收球面积有限且不可调,缺乏保护结构易损坏,更没有储球构件而无法适应连续收发对打训练活动。
4、申请号为201910957838.2和申请号为202020544433.4的专利,提出以一种通过仿生机械抓手捡拾网球并放入储球框的方式收球,并由四个麦克纳姆轮驱动的网球机器人。前者提出了通过机械臂抛球的方式与球员进行训练;后者搭载发球筒发球实现收发球一体化。这两种机器人的优点是能够实现自动捡球、抛球或发球,降低了人工劳动强度,但是两种机器人均不能实现与球员连续对打,且收发球时间较长,不能实现网球的循环使用。
5、为满足网球陪练机器人移动位置、空间姿态、射球速度与旋转等参数可适时调控的需求,现有的网球收发或拾抛一体机器人往往机械结构复杂、重量和体积较大,以致失去机体轻便性与灵活移动性,对训练者击球的响应速度滞后、移动准确性受限,在对打过程中常常出现延时或是接球失败等问题。
6、全新开发易于携带至球场的网球陪练机器人,并赋予其快速全向移动、训练者击球有效回收、精准机动发球等能力,将大大帮助训练者提升球技又节省雇用陪练的费用。此技术装备将为运动爱好者提供运动训练的有效工具与新兴模式,有助于球类体育运动产生人机融合的智能化训练新业态。
技术实现思路
1、本发明的目的在于提供一种双轮收发一体式网球陪练机器人,具有自动且循环收发网球和适时定向移动功能,实现不同网球技能水平人员的长期稳定陪练作用。
2、为解决上述技术问题,本发明是采用如下技术方案实现的,结合附图说明如下:
3、需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
4、一种双轮收发一体式网球陪练机器人,包括移动模块、收球模块、发球模块、定位模块、控制电路板;
5、移动模块作为机器人的底盘,设置在发球模块下方,收球模块设置在发球模块上方;
6、定位模块包括双目相机;超带宽定位基站;位置标签;
7、定位模块的超带宽定位基站设置在网球场的四个角落,定位模块的位置标签安装在控制电路板上,定位模块的双目相机布置在网球场中的训练者一侧;控制电路板安装在移动模块上。
8、进一步地,设置在四个角落超带宽定位基站中的一个基站,为主基站,与计算机连接,能够读取位置标签与四个角落的基站分别的位置,从而通过公式计算移动模块的位置坐标。
9、进一步地,所述双目相机能够高速采集场景的rgb图像和深度图像,使用常规神经网络识别网球在rgb图像中的平面坐标,结合双目相机自带的深度信息,综合形成网球空间位置坐标;通过网球空气动力学模型预测网球落点位置,将结果通过wi-fi发送至控制电路板;同理,测得训练者在球场中的位置坐标,并发送至控制电路板。
10、进一步地,所述移动模块包括两个电机轮;移动模块的两个电机轮连接于底盘,移动模块上方安装壳体,壳体内包含发球模块,发球模块通过管道连接上方收球模块的球盆;
11、移动模块采用的是双轮差速驱动,即控制电路板分别控制两个电机轮的转速与角度,当两个电机轮转速相同时网球陪练机器人能够直线行驶,当两个电机轮存在速度差时网球陪练机器人能够灵活转向;
12、发球模块将网球发射至训练者所在的坐标前方,要求训练者以机器人所在位置为目标进行回球;训练者击球后,双目相机捕捉并计算网球落点,控制电路板控制移动模块中的两个电机轮旋转,使移动模块移动到网球落点处收球模块实现收球,同时控制电路板控制发球模块发射下一个网球。
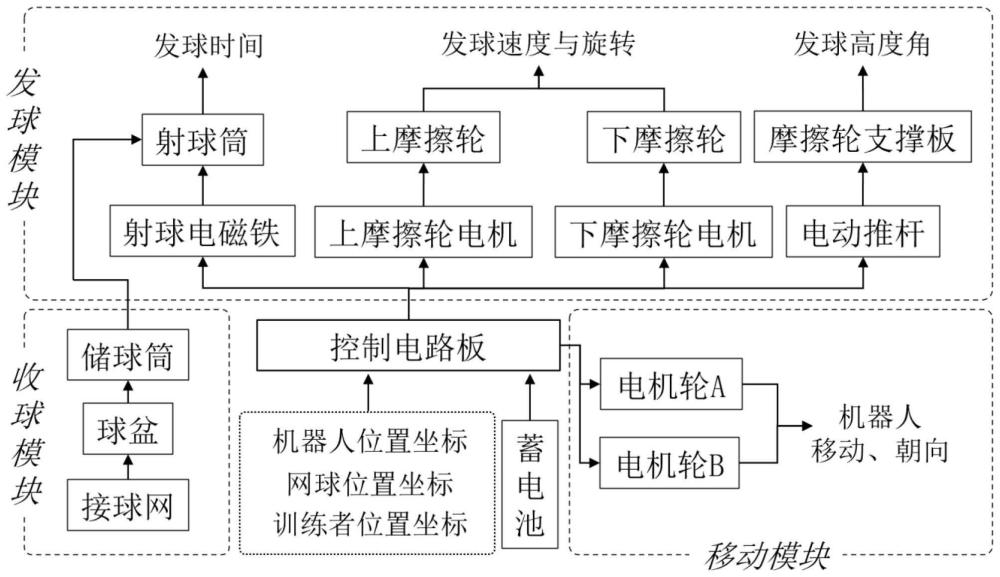
13、进一步地,所述发球模块主要由支撑架、俯仰调节机构和网球推进机构组成;所述支撑架位于发球模块一侧,下方通过螺栓与底盘相连;所述网球俯仰调节机构包括电动推杆、摩擦轮支撑板、轴承和俯仰调整轴等部分,俯仰调整轴通过两个轴承并安装在支撑架上,摩擦轮支撑板中间被俯仰调整轴贯穿,左右两侧分别安装摩擦轮电机和摩擦轮,摩擦轮支撑板下方与电动推杆以铰链相连,推杆另一侧与支撑架也以铰链相连;所述网球推进机构位于俯仰调节机构下方,由三通支撑板、射球电磁铁、射球筒和储球筒等部分组成,三通支撑板固定在俯仰调整轴上,射球筒和储球筒组成三通管道且由三通支撑板固定,射球电磁铁从三通管道的一侧口伸入射球筒中,另一侧口正对俯仰调节机构两个摩擦轮中间的空隙,上侧口为储球筒并与收球模块的落球孔相连。
14、进一步地,所述收球模块主要由收球框、接球网、球盆、支架和伸缩杆组成,收球框由上、下两框通过铰接与锁紧旋钮连为一体,能够手动调节俯仰角度,框内水平方向安装若干根可调节松紧度的缓冲线;所述接球网的上端和左右两侧通过拧紧螺钉固定在收球框上,下端环绕在球盆的两侧和后端,同时周围连接低弹性网针织布;所述球盆形状为四周高而中间低,由弹性较低的塑料板材制成,中间设一孔径稍大于标准网球直径的落球孔,与发球模块的储球筒相连;所述支架安装在球盆下方,上端支撑与连接球盆各固定部位,下端定装固定在底盘上,周边紧贴机体外壳,尾部支架中间和下沿装有定位件、锁紧件;所述伸缩杆分上伸缩杆和下伸缩杆,上伸缩杆上端通过支座及锁紧件与收球框相连,下伸缩杆为内径与上伸缩杆外径相匹配的空心圆杆,伸缩杆下端与球盆后端的支架铰接。
15、进一步地,控制电路板通过控制发球模块中的上摩擦轮电机与下摩擦轮电机转速,实现发球速度与旋转的调节;控制电路板通过控制电动推杆的伸缩位置,使摩擦轮支撑板绕俯仰调整轴旋转,从而调整发球的高度角;控制电路板通过控制射球电磁铁的通断,实现射球筒中网球发射时间的控制;训练者击打来自机器人的网球后,双目相机为控制电路板提供网球坐标,超带宽定位系统基站为控制电路板提供机器人位置坐标,控制电路板控制移动模块中两个电机轮旋转,使机器人移动至网球落点位置;收球模块中的接球网拦截训练者击打的网球后,网球落入球盆并滚入储球筒中;每次从射球筒发射一个网球,储球筒中将重新填充一个网球至射球筒。
16、进一步地,所述壳体包括前机壳、后机壳和底壳罩三部分,壳体底部面积比底盘略大,固定在底盘外围;前机壳为向前凸出曲面,前端面为矩形平面,上方为倾斜面,倾斜面中间开设宽度略大于网球直径的矩形出球孔;后机壳背面开设圆孔,以便固定后机壳于支架尾部;底部壳罩通过螺栓固定在底盘中间开孔位置的正下方。
17、一种双轮收发一体式网球陪练机器人的运行方法,包括三种运行模式:
18、其一,收发一体对打训练模式,收球模块和发球模块同时工作,由训练者或陪练机器人先发球;以训练者先发球为例,机器人的储球筒中球处于待发射状态,收球模块收集到网球再由发球模块射出,如此往复进行训练;
19、其二,“发球机”模式,将收球模块折叠,在球盆和储球筒中装满一定数量网球,同时可选择关闭机器人的移动模块,也可事先设定机器人的特定移动方式,不断改变机器人发球方向和初速度,开展回球训练;
20、其三,“球童”模式,关闭机器人的发球模块,同时可关闭机器人的移动模块,也可事先设定机器人特定移动方式,训练者在另一侧发球,以击打网球进入机器人收球模块为目标进行固定目标点和变动目标点的发球准确度训练。
21、与现有技术相比本发明的有益效果是:
22、1.本发明所述的双轮收发一体式网球陪练机器人使用了大直径双轮差速驱动方式,使机器人兼具高速移动与方位调整能力,极大程度精简了网球陪练机器人的结构与重量,赋予其快速动作响应能力。
23、2.本发明所述的双轮收发一体式网球陪练机器人设计了折叠式网球捕捉机构,在工作过程中,通过调整上下伸缩杆套配合的相对位置并伸缩和定位收网球网,即可调节定位收球框的倾角,以优化接球角度与方位,非工作状态时可合理归位收纳网球、支架、收球框及接球网,在保证网球有效性捕捉的同时大为提升网球陪练机器人便携性。
24、3.本发明所述的双轮收发一体式网球陪练机器人通过巧妙的机械结构布局,实现完整的网球发射轨迹控制能力,网球的发球时间、发球速度与旋转程度、发球角度皆可调节,实现模拟对打的多样性与个性化。
25、4.本发明所述的双轮收发一体式网球陪练机器人在工作状态下既可自动收发网球而与球员对打训练,也可将收球模块折叠,将机器人转换至“发球机”模式或者关闭发球模块转换至“球童”模式,实现多模式自由转换以满足不同训练者的需要。
本文地址:https://www.jishuxx.com/zhuanli/20240615/78721.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
多功能跑步机的制作方法
下一篇
返回列表