一种融合套色误差补偿的印刷控制方法和装置
- 国知局
- 2024-07-05 16:07:49
本发明涉及印刷控制,尤其涉及一种融合套色误差补偿的印刷控制方法和装置。
背景技术:
1、目前卷对卷印刷系统由于其持续和大规模的制造能力,一直被应用于工业制造领域。在卷对卷印刷系统运行时,网布材料被输送到印刷位置,不同的印刷单元印刷上不同的图案。套色误差是理论上应该打印的图案位置与实际打印位置之间的错位距离,这个距离应该保持在小范围内以确保产品质量。然而,卷对卷印刷系统上游的套色控制会导致中间网布的张力变化,从而引起与网布相关的下游套色误差,这使得印刷产品质量低,印刷系统的套色控制精度低。
2、综上,相关技术中存在的技术问题有待得到改善。
技术实现思路
1、本发明实施例提供了一种融合套色误差补偿的印刷控制方法和装置,有效地提高了套色控制精度和印刷产品质量。
2、一方面,本发明实施例提供了一种融合套色误差补偿的印刷控制方法,包括以下步骤:
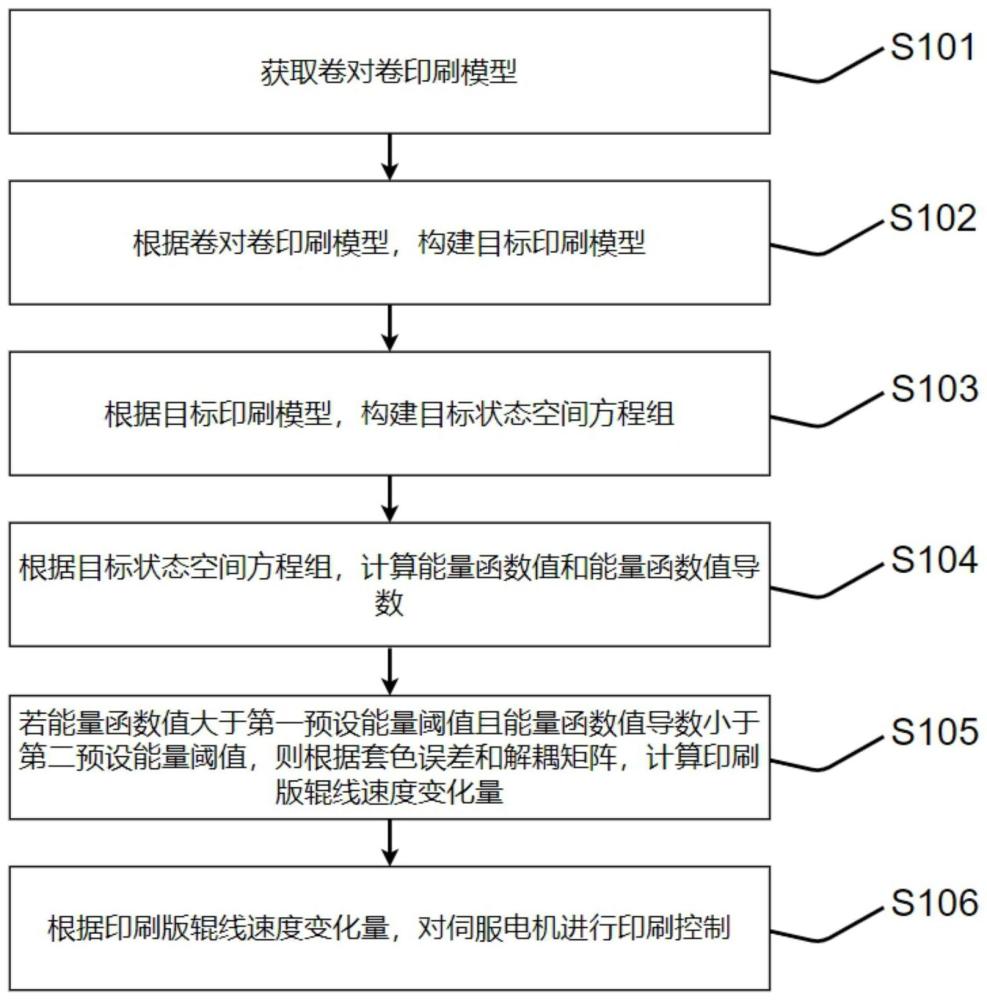
3、获取卷对卷印刷模型;
4、根据所述卷对卷印刷模型,构建目标印刷模型;
5、根据所述目标印刷模型,构建目标状态空间方程组;
6、根据所述目标状态空间方程组,计算能量函数值和能量函数值导数;
7、若所述能量函数值大于第一预设能量阈值且所述能量函数值导数小于第二预设能量阈值,则根据套色误差和解耦矩阵,计算印刷版辊线速度变化量;
8、根据所述印刷版辊线速度变化量,对伺服电机进行印刷控制。
9、在一些实施例中,所述卷对卷印刷模型包括第一印刷方程和第二印刷方程,所述根据所述卷对卷印刷模型,构建目标印刷模型,包括:
10、对所述第二印刷方程进行求导,得到第三印刷方程;
11、根据所述第一印刷方程和所述第三印刷方程,构建第四印刷方程;
12、根据所述第二印刷方程和所述第四印刷方程,构建第五印刷方程;
13、对所述第五印刷方程进行积分,得到第六印刷方程;
14、根据所述第六印刷方程和第七印刷方程,构建所述目标印刷模型。
15、在一些实施例中,所述根据所述目标印刷模型,构建目标状态空间方程组,包括:
16、根据所述目标印刷模型,构建第一状态空间方程组;
17、根据所述解耦矩阵和所述第一状态空间方程组,构建第二状态空间方程组;
18、根据扰动量和所述第二状态空间方程组,构建所述目标状态空间方程组。
19、在一些实施例中,所述根据所述解耦矩阵和所述第一状态空间方程组,构建第二状态空间方程组,包括:
20、对所述第一状态空间方程组进行拉普拉斯变换,得到第三状态空间方程组;
21、根据所述解耦矩阵和所述第三状态空间方程组,构建第四状态空间方程组;
22、对所述第四状态空间方程组进行拉普拉斯反变换,得到所述第二状态空间方程组。
23、在一些实施例中,所述根据所述目标状态空间方程组,计算能量函数值和能量函数值导数,包括:
24、根据所述目标状态空间方程组,构建目标扰动观测模型;
25、根据所述目标扰动观测模型,计算扰动量估计值;
26、根据所述目标状态空间方程组,计算扰动量;
27、根据所述扰动量和所述扰动量估计值,计算扰动差值;
28、根据所述扰动差值和套印差值,计算所述能量函数值;
29、对所述能量函数值进行求导,得到所述能量函数值导数。
30、在一些实施例中,所述根据所述目标状态空间方程组,构建目标扰动观测模型,包括:
31、根据所述目标状态空间方程组,构建第一扰动观测模型;
32、对所述第一扰动观测模型进行拆分处理,得到所述目标扰动观测模型。
33、在一些实施例中,所述根据套色误差和解耦矩阵,计算印刷版辊线速度变化量,包括:
34、根据自适应反馈增益和所述套色误差,计算自适应反馈控制量;
35、根据所述扰动量估计值,计算前馈补偿量;
36、根据所述自适应反馈控制量和所述前馈补偿量,计算控制量;
37、根据所述控制量和所述解耦矩阵,计算所述印刷版辊线速度变化量。
38、在一些实施例中,所述目标印刷模型的表达式如下:
39、
40、式中,ei+1为第i+1单元的套色误差,ei为第i单元的套色误差,v*为印刷速度,li为第i个凹印版辊与第i+1个凹印版辊之间的网布长度,δvi为第i个凹印版棍的线速度变化量,τ为积分变量,i=1,i为模型参数,t为连续时间中第t时刻。
41、在一些实施例中,所述目标状态空间方程组的表达式如下:
42、
43、式中,为第一套印误差的导数,x=[ei+1 ei … e2]t,x为第一套印误差,ei为第i单元的套色误差,a′=diag{-ai,-ai-1,…,-a1},v*为印刷速度,ki为第i个凹印版辊与第i+1个凹印版辊之间的网布长度,b′=-a′,u=[ui+1 ui … u2]t,ui为第i个印刷版辊线速度的积分,ω为扰动量,y为目标套印误差,c为单位矩阵,t为连续时间中第t时刻。
44、另一方面,本发明实施例提供了一种融合套色误差补偿的印刷控制装置,包括:
45、第一模块,用于获取卷对卷印刷模型;
46、第二模块,用于根据所述卷对卷印刷模型,构建目标印刷模型;
47、第三模块,用于根据所述目标印刷模型,构建目标状态空间方程组;
48、第四模块,用于根据所述目标状态空间方程组,计算能量函数值和能量函数值导数;
49、第五模块,用于若所述能量函数值大于第一预设能量阈值且所述能量函数值导数小于第二预设能量阈值,则根据套色误差和解耦矩阵,计算印刷版辊线速度变化量;
50、第六模块,用于根据所述印刷版辊线速度变化量,对伺服电机进行印刷控制。
51、本发明所具有的有益效果如下:
52、本发明首先获取卷对卷印刷模型,构建目标印刷模型,构建目标状态空间方程组,然后根据目标状态空间方程组,计算能量函数值和能量函数值导数,若能量函数值大于第一预设能量阈值且能量函数值导数小于第二预设能量阈值,则根据套色误差和解耦矩阵,计算印刷版辊线速度变化量,最后根据印刷版辊线速度变化量,对伺服电机进行印刷控制,从而实现了印刷控制,提高了套色控制精度和印刷产品质量。
53、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
技术特征:1.一种融合套色误差补偿的印刷控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述卷对卷印刷模型包括第一印刷方程和第二印刷方程,所述根据所述卷对卷印刷模型,构建目标印刷模型,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述目标印刷模型,构建目标状态空间方程组,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述解耦矩阵和所述第一状态空间方程组,构建第二状态空间方程组,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标状态空间方程组,计算能量函数值和能量函数值导数,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述目标状态空间方程组,构建目标扰动观测模型,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据套色误差和解耦矩阵,计算印刷版辊线速度变化量,包括:
8.根据权利要求1所述的方法,其特征在于,所述目标印刷模型的表达式如下:
9.根据权利要求1所述的方法,其特征在于,所述目标状态空间方程组的表达式如下:
10.一种融合套色误差补偿的印刷控制装置,其特征在于,包括:
技术总结本发明公开了一种融合套色误差补偿的印刷控制方法和装置,方法包括:获取卷对卷印刷模型;根据所述卷对卷印刷模型,构建目标印刷模型;根据所述目标印刷模型,构建目标状态空间方程组;根据所述目标状态空间方程组,计算能量函数值和能量函数值导数;若所述能量函数值大于第一预设能量阈值且所述能量函数值导数小于第二预设能量阈值,则根据套色误差和解耦矩阵,计算印刷版辊线速度变化量;根据所述印刷版辊线速度变化量,对伺服电机进行印刷控制。本发明实现了印刷控制,提高了套色控制精度和印刷产品质量。本发明可广泛应用于印刷控制技术领域。技术研发人员:陈智华,原浩文,张涛,李伟河受保护的技术使用者:广州大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/40632.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
液体喷出装置的制作方法
下一篇
返回列表