一种全自动落筒方法与流程
- 国知局
- 2024-07-05 16:39:42
本发明属于加弹机辅助方法,具体涉及一种全自动落筒方法。
背景技术:
1、在化纤生产加工领域中,加弹机用于将涤纶(poy)、丙纶等无捻丝,通过加捻变形加工成为具有中弹或低弹性能的弹力丝(dty),并将加工完后的丝线缠绕成卷。目前加弹机的取满筒到放空筒过程中的一系列工作,全部由人工操作。具体的,加弹机的一个工位上的丝筒满卷后,首先由工作人员将该满丝筒的纱线手工剪断并留头,再由人工将加弹机的主机动臂打开,人工取下满筒,放上空筒,然后人工闭合主机动臂,最后再由人工将留头的丝线送到空筒相应的卡丝槽处。从而完成整个取筒落筒过程。
2、人工作业时间紧凑,工序繁琐,人工抬压开合主机动臂所需力度大,还需与拿放满筒和空筒进行配合,且满筒较重,操作较为困难,使得工人劳动强度大,长时间劳动效率低。而且,部分车间巷道较窄,取放筒不方便。还有,手动取满筒容易造成丝线表面受损而影响丝线品质。
技术实现思路
1、本发明所要解决的技术问题是:提供一种全自动落筒方法,实现取满筒放空筒整个流程全自动化。
2、为解决上述技术问题,本发明的实施例提供一种全自动落筒方法,采用全自动络筒机;所述方法包括以下步骤:
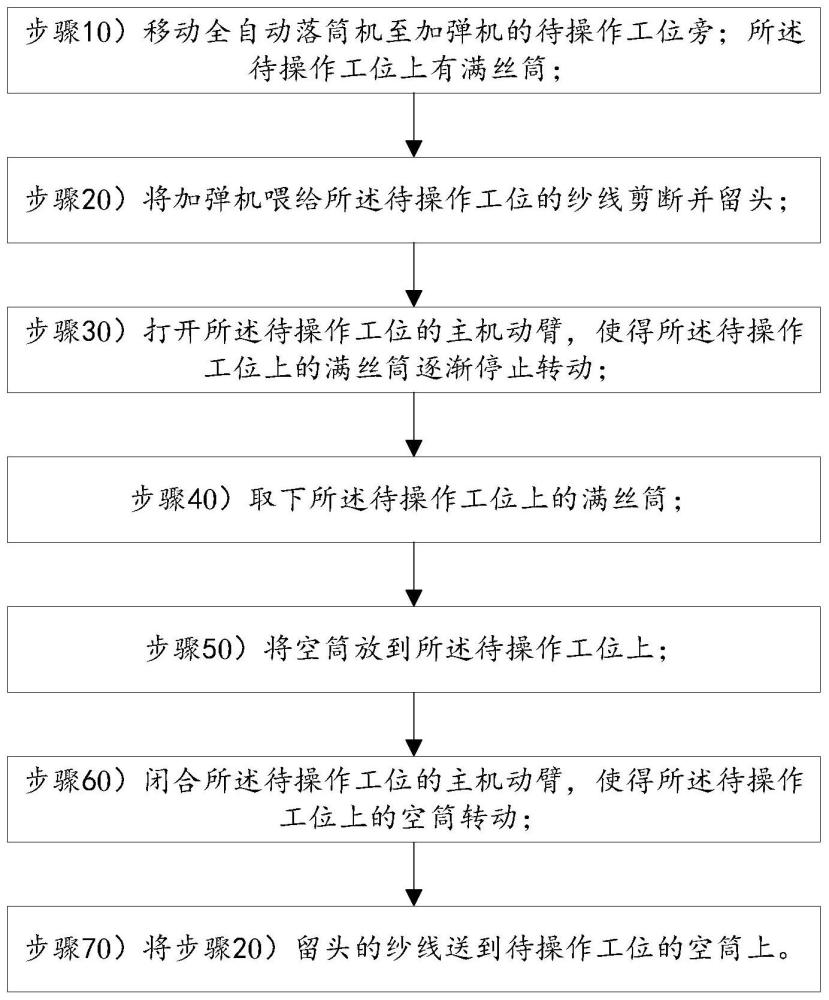
3、步骤10)移动全自动落筒机至加弹机的待操作工位旁;所述待操作工位上有满丝筒;
4、步骤20)将加弹机喂给所述待操作工位的纱线剪断并留头;
5、步骤30)打开所述待操作工位的主机动臂,使得所述待操作工位上的满丝筒逐渐停止转动;
6、步骤40)取下所述待操作工位上的满丝筒;
7、步骤50)将空筒放到所述待操作工位上;
8、步骤60)闭合所述待操作工位的主机动臂,使得所述待操作工位上的空筒转动;
9、步骤70)将步骤20)留头的纱线送到待操作工位的空筒上。
10、作为本发明实施例的进一步改进,所述步骤20)中,将加弹机喂给多个待操作工位的多根纱线收拢,同步剪断并留头。
11、作为本发明实施例的进一步改进,所述多个待操作工位位于同一列。
12、作为本发明实施例的进一步改进,所述步骤70)中,当步骤20)中的多个待操作工位上均放有空筒后,将留头的多根纱线逐一送到多个待操作工位的空筒上,纱线与空筒一一对应。
13、作为本发明实施例的进一步改进,所述步骤30)中,打开所述待操作工位的主机动臂,具体包括:将抬压件移动到待操作工位的主机动臂旁,抬压件作用于主机动臂下方,将主机动臂向上抬起;将抬压件作用于主机动臂内侧,将主机动臂向外拨,从而打开主机动臂。
14、作为本发明实施例的进一步改进,所述步骤30)中,打开待操作工位的主机动臂后,并保持主机动臂呈打开状态。
15、作为本发明实施例的进一步改进,所述步骤60)中,闭合所述待操作工位的主机动臂,具体包括:将抬压件脱离主机动臂内侧,使得主机动臂自动内合;将抬压件向上移动,使得抬压件作用于主机动臂上方,利用抬压件将主机动臂向下压,从而闭合主机动臂。
16、作为本发明实施例的进一步改进,所述步骤40)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,取满丝筒过程中,取放筒臂保持的开口向上,使得满丝筒保持水平状态且不发生转动。
17、作为本发明实施例的进一步改进,所述步骤50)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,放空筒过程中,取放筒臂保持开口向上,使得空筒保持水平状态且不发生转动。
18、作为本发明实施例的进一步改进,所述步骤40)还包括:将满丝筒运输至出满筒工位后,放下满丝筒。
19、作为本发明实施例的进一步改进,所述步骤40)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,取满筒和运输满筒过程中,取放筒臂保持开口向上,使得满丝筒保持水平状态且不发生转动。
20、作为本发明实施例的进一步改进,所述步骤40)中,将满丝筒运输至出满筒工位后,打开两个取放筒臂,将满丝筒放下。
21、作为本发明实施例的进一步改进,所述步骤40)和步骤50)利用同一个取放筒装置;或者,所述步骤40)和步骤50)分别利用一个取放筒装置。
22、作为本发明实施例的进一步改进,还包括:
23、步骤80)将取下的满丝筒放置到丝车架的空位上。
24、作为本发明实施例的进一步改进,还包括:
25、待步骤70)中的空筒卷绕成满丝筒后,重复步骤20)至步骤70),直至结束工作。
26、与现有技术相比,本发明的技术方案具有以下有益效果:
27、本实施例的全自动落筒方法,利用全自动落筒机,自动执行断丝留头、打开主机动臂、取满丝筒、放空筒、闭合主机动臂和将留头纱线送上空筒等一系列工序,实现落筒作业所有工序的自动化,提高落筒效率。整个过程无需人工参与,降低工人劳动强度。
技术特征:1.一种全自动落筒方法,其特征在于,采用全自动络筒机;所述方法包括以下步骤:
2.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤20)中,将加弹机喂给多个待操作工位的多根纱线收拢,同步剪断并留头。
3.根据权利要求2所述的全自动落筒方法,其特征在于,所述多个待操作工位位于同一列。
4.根据权利要求2所述的全自动落筒方法,其特征在于,所述步骤70)中,当步骤20)中的多个待操作工位上均放有空筒后,将留头的多根纱线逐一送到多个待操作工位的空筒上,纱线与空筒一一对应。
5.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤30)中,打开所述待操作工位的主机动臂,具体包括:将抬压件移动到待操作工位的主机动臂旁,抬压件作用于主机动臂下方,将主机动臂向上抬起;将抬压件作用于主机动臂内侧,将主机动臂向外拨,从而打开主机动臂。
6.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤30)中,打开待操作工位的主机动臂后,并保持主机动臂呈打开状态。
7.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤60)中,闭合所述待操作工位的主机动臂,具体包括:将抬压件脱离主机动臂内侧,使得主机动臂自动内合;将抬压件向上移动,使得抬压件作用于主机动臂上方,利用抬压件将主机动臂向下压,从而闭合主机动臂。
8.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤40)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,取满丝筒过程中,取放筒臂保持的开口向上,使得满丝筒保持水平状态且不发生转动。
9.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤50)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,放空筒过程中,取放筒臂保持开口向上,使得空筒保持水平状态且不发生转动。
10.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤40)还包括:将满丝筒运输至出满筒工位后,放下满丝筒。
11.根据权利要求10所述的全自动落筒方法,其特征在于,所述步骤40)中,利用两个取放筒臂的放筒槽支撑满丝筒的筒体两端外壁,取满筒和运输满筒过程中,取放筒臂保持开口向上,使得满丝筒保持水平状态且不发生转动。
12.根据权利要求11所述的全自动落筒方法,其特征在于,所述步骤40)中,将满丝筒运输至出满筒工位后,打开两个取放筒臂,将满丝筒放下。
13.根据权利要求1所述的全自动落筒方法,其特征在于,所述步骤40)和步骤50)利用同一个取放筒装置;或者,所述步骤40)和步骤50)分别利用一个取放筒装置。
14.根据权利要求1所述的全自动落筒方法,其特征在于,还包括:
15.根据权利要求1所述的全自动落筒方法,其特征在于,还包括:
技术总结本发明提供一种全自动落筒方法,采用全自动络筒机;方法包括以下步骤:步骤10)移动全自动落筒机至加弹机的待操作工位旁;待操作工位上有满丝筒;步骤20)将加弹机喂给待操作工位的纱线剪断并留头;步骤30)打开待操作工位的主机动臂,使得待操作工位上的满丝筒逐渐停止转动;步骤40)取下待操作工位上的满丝筒;步骤50)将空筒放到待操作工位上;步骤60)闭合待操作工位的主机动臂,使得待操作工位上的空筒转动;步骤70)将步骤20)留头的纱线送到待操作工位的空筒上。本发明提供的一种全自动落筒方法,实现取满筒放空筒整个流程全自动化。技术研发人员:阮德智,王传满,何浩浩,何绒受保护的技术使用者:合肥松宝科技有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/43696.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表