一种高处作业安全带智能挂钩及使用方法
- 国知局
- 2024-07-05 16:57:59
本发明涉及高处作业安全防护领域,尤其涉及一种高处作业安全带智能挂钩及使用方法。
背景技术:
1、电力、化工、铁路、建筑等行业需要进行巡检、敷设及维护等高空作业时,对于高空作业人员来说需要安全防护装置用于防止作业人员坠落。高空作业常用的为双钩式安全带,尤其是在登高过程中,两个挂钩交替使用,从而保障作业人员登高过程的安全。
2、传统的高空作业安全装置通常包括双钩式安全带,这些安全带通过两个挂钩固定在作业人员穿戴的全身式安全带上,然后连接到支撑结构或锚点上。这些双钩式安全带在防止坠落方面具有一定效果,但也存在一些问题和局限性:
3、限制作业范围:双钩式安全带通常只允许作业人员在连接点附近进行工作,限制了他们的活动范围和灵活性。
4、作业效率低下:作业人员在高空作业时,需要不断地交替使用两个挂钩,以确保始终有一个挂钩固定在支撑结构上。这会增加作业的复杂性和耗时,降低了作业效率。
5、依赖人工操作:由于需要手动操作挂钩,双钩式安全带依赖于作业人员的人工警惕性,存在误操作和疏忽的风险。
6、缺乏智能监测:传统安全带通常缺乏智能监测功能,无法监测安全带的状态。
7、安全性和舒适性有待改进:传统的双钩式安全带在长时间使用时可能导致不适,需要进一步改进以提高舒适性。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的是提供一种高度智能化、便捷、安全、高效的高处作业防高坠安全带,通过设计智能挂钩替代现有安全带的金属挂钩,以解决这些技术问题,改善高空作业环境,确保作业人员的安全,并提高工作效率。
2、为实现上述目的及其他相关目的,本发明提供一种高处作业安全带智能挂钩,所述智能挂钩包括:
3、内部主体框架;
4、安全带固定柄,所述安全带固定柄与所述内部主体框架固定连接;
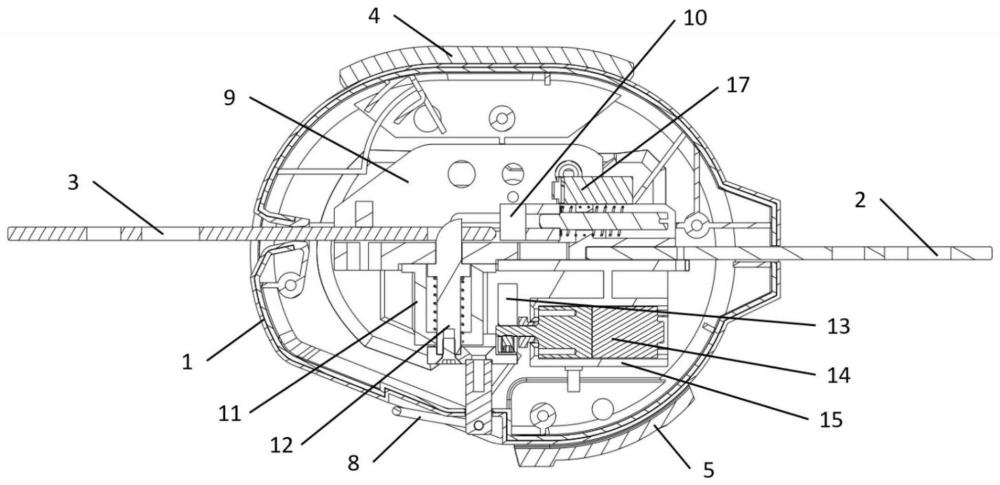
5、安全带锁头,所述安全带锁头能够沿左右方向插入所述内部主体框架;所述安全带锁头与安全带固定柄相对设置,且安全带锁头与安全带固定柄相互远离的外端部通过安全带连接,安全带锁头引导安全带绕过需要固定的位置,再插入到智能挂钩内部实现锁止;
6、所述内部主体框架的下方设置有能够沿上下方向移动的拉销,所述拉销与安全带锁头的限位孔相匹配,使得拉销向上移动时穿过所述限位孔以实现安全带锁头的锁止固定。
7、优选地,所述拉销设置于拉销固定壳内,拉销固定壳内固定有拉销弹簧,以提供给拉销向上运动的弹力;
8、所述拉销的下端固定有活动板,活动板下方连接有机械拉环用于机械开锁,通过向外拉动机械拉环带动拉销下移压缩拉销弹簧,解除对安全带锁头的锁止,使安全带锁头脱出,从而将整个智能挂钩与所固定的位置分离。
9、优选地,所述内部主体框架的上方设置有能够沿左右方向移动的滑块,所述安全带锁头到达锁止位时推动滑块移动,使滑块触发机械限位开关,电路板上的处理器接收到来自机械限位开关的信号后判定智能挂钩为锁止状态;
10、所述滑块远离所述安全带锁头的一侧设置有滑块弹簧,以提供给滑块朝向安全带锁头的回复弹力,进而在锁止解除瞬间将安全带锁头推出。
11、优选地,所述内部主体框架的下方设置有智能开锁组件,包括电机、固定于电机转轴的偏心轮,所述偏心轮位于固定在拉销下端的活动板上方,偏心轮在旋转过程中半径长的一端推动活动板向下移动,从而带动拉销向外移动;
12、所述智能开锁组件还包括位于偏心轮一侧的光电限位开关,用于检测所述偏心轮的旋转周数,偏心轮旋转完成一圈后光电限位开关触发电路板上的处理器停止电机旋转。
13、优选地,所述智能开锁组件还包括开锁按键,一对智能挂钩进行配对后,能够通过所述开锁按键控制彼此的电机的运作,以实现远程解锁。
14、优选地,所述电路板上设有核心处理器、无线通信模块,核心处理器用于接收机械限位开关和光电限位开关、开锁按键的触发信号;无线通信模块用于将一对智能挂钩进行配对,实现两个智能挂钩智能的无线数据传输。
15、优选地,所述智能挂钩还包括充电口及锂电池,通过电路板保护仓盖实现电路板和锂电池的防水防尘防护。
16、优选地,所述智能挂钩还包括壳体,以及设置在壳体表面的防护硅胶。
17、本发明还提供一种所述的高处作业安全带智能挂钩的使用方法,包括智能挂钩的锁止方法及开锁方法;智能挂钩的锁止方法,包括如下步骤:
18、s1:将安全带锁头带着安全带绕过需要固定的位置,包括电力铁塔的角钢、建筑施工的安全支架,将安全带锁头插入智能挂钩;
19、s2:将安全带锁头在内部主体框架向里面移动,安全带锁头的端部推动拉销向下移动,拉销向下移动时压缩拉销弹簧;
20、s3:安全带锁头继续向里移动,安全带锁头的端部移过拉销后推动滑块移动,滑块移动压缩滑块弹簧;
21、s4:安全带锁头的限位孔移动到拉销的所处位置后,拉销弹簧恢复自由状态,使得拉销归位,从而穿过安全带锁头上的限位孔,实现智能挂钩锁止;
22、s5:智能挂钩锁止后,滑块弹簧处于压缩状态,同时滑块触发机械限位开关,电路板上的处理器判定智能挂钩为锁止状态。
23、优选地,智能挂钩的开锁方法,包括如下步骤:
24、t1:通过电路板的无线通信模块将一对智能挂钩进行配对,实现两个智能挂钩的无线数据传输;作业人员将智能挂钩固定完成后,通过按动智能挂钩一侧的开锁按键触发远程开锁;
25、t2:电路板接收到开锁按键的触发信号后,首先检测智能挂钩本身的锁止状态,如果处于正常锁止状态,通过无线模块向另外一个智能挂钩发送开锁指令;
26、t3:另一个智能挂钩接收到开锁指令后,电路板通过驱动电路将锂电池中的电能向电机供电,同时驱动电机旋转;
27、t4:电机驱动偏心轮转动,偏心轮一侧的光电限位开关判断偏心轮是否旋转一圈,旋转完成一圈后光电限位开关触发电路板上的处理器停止电机旋转,偏心轮在旋转过程中半径长的一端推动活动板及拉销向外移动;
28、t5:拉销向外移动压缩拉销弹簧,拉销上端脱离安全带锁头上的限位孔,安全带锁头在滑块弹簧的推动下向外移动,从而将安全带锁头推出智能挂钩;
29、t6:当智能挂钩出现电量低、通信异常或需要手动开锁的情况时,手动开锁的作业人员拉动机械拉环向外移动,从而带动拉销向外移动,拉销向外移动压缩拉销弹簧;拉销一端脱离安全带锁头上的限位孔,安全带锁头在滑块弹簧的推动下向外移动,从而将安全带锁头推出智能挂钩。
30、如上所述,本发明提供一种高处作业安全带智能挂钩及使用方法,具有以下有益效果:
31、提高高空作业安全性:本发明的智能挂钩采用了多重安全措施,包括机械锁止和远程开锁功能,有效降低了高空作业人员坠落的风险。通过机械锁止,确保在挂钩被正确固定之前不会发生解锁,增加了安全性。而远程开锁功能使作业人员可以方便地在登高过程中对挂钩进行开锁和回收,减少了作业人员的悬空时间,进一步提高了安全性。
32、提高作业效率:本发明的智能挂钩采用了远程开锁功能,使作业人员可以更快速地完成高空作业。不再需要手动操作挂钩,节省了时间和劳动成本,提高了作业效率。同时,智能监测功能还能够实时反馈挂钩的状态,帮助作业人员更好地掌握作业进度。
33、降低人为误操作风险:传统的双钩式安全带依赖于人工操作挂钩,容易受到作业人员的误操作和疏忽。而本发明的智能挂钩通过电子控制,可以避免人为因素导致的意外情况,提高了作业的稳定性和安全性。
34、智能监测功能:本发明的智能挂钩具备智能监测功能,可以实时监测挂钩的状态,包括锁止状态和电池电量等。这有助于作业人员及时发现潜在问题,提前进行维护,确保挂钩的可靠性和安全性。
35、经济效益:高空作业安全事故往往导致巨大的经济损失,包括医疗费用、赔偿费用和停工损失等。本发明的智能挂钩能够显著降低高空作业事故的风险,从而降低了相关经济损失。此外,提高了高空作业的效率,也可以减少作业成本。
36、社会效益:本发明的应用将有助于提升高空作业领域的安全标准和作业效率,有助于降低工伤事故的发生率,保护作业人员的生命安全。这对于推动高空作业行业的健康发展和社会稳定具有积极作用。
本文地址:https://www.jishuxx.com/zhuanli/20240617/45609.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。