一种消防水喷射路径和落水点检测方法及消防系统与流程
- 国知局
- 2024-07-05 16:59:24
本发明属于消防自动化,涉及一种消防水喷射路径和落水点检测方法及消防系统。
背景技术:
1、近些年随着新能源、新型建筑、石油炼化等行业的快速发展,各种新材料、新工艺、新产品不断涌现和大量投入使用,火灾变得越来越复杂,火灾防控难度也越来越大。消防机器人、遥控消防炮等新型消防装置逐渐兴起,它们可一定程度代替救援人员进入火场,定位火源并喷射灭火介质,大大降低了处置火灾时人员受伤风险。然而当前消防机器人、消防炮等自动装置在定位火源和喷射消防介质灭火时,很大程度还是依靠人工在后方手持遥控终端下达指令,火灾现场往往浓烟密布,操作信号易受干扰,现场人员嘈杂、秩序混乱,环境风还可能影响灭火介质喷射轨迹和落水点位置,因此人工判断消防水喷射轨迹和落水点位置精准度差,易导致火灾处置效率低,造成事故损失扩大。
技术实现思路
1、本发明所要解决的技术问题在于如何准确判断消防水喷射轨迹和落水点位置。
2、本发明是通过以下技术方案解决上述技术问题的:
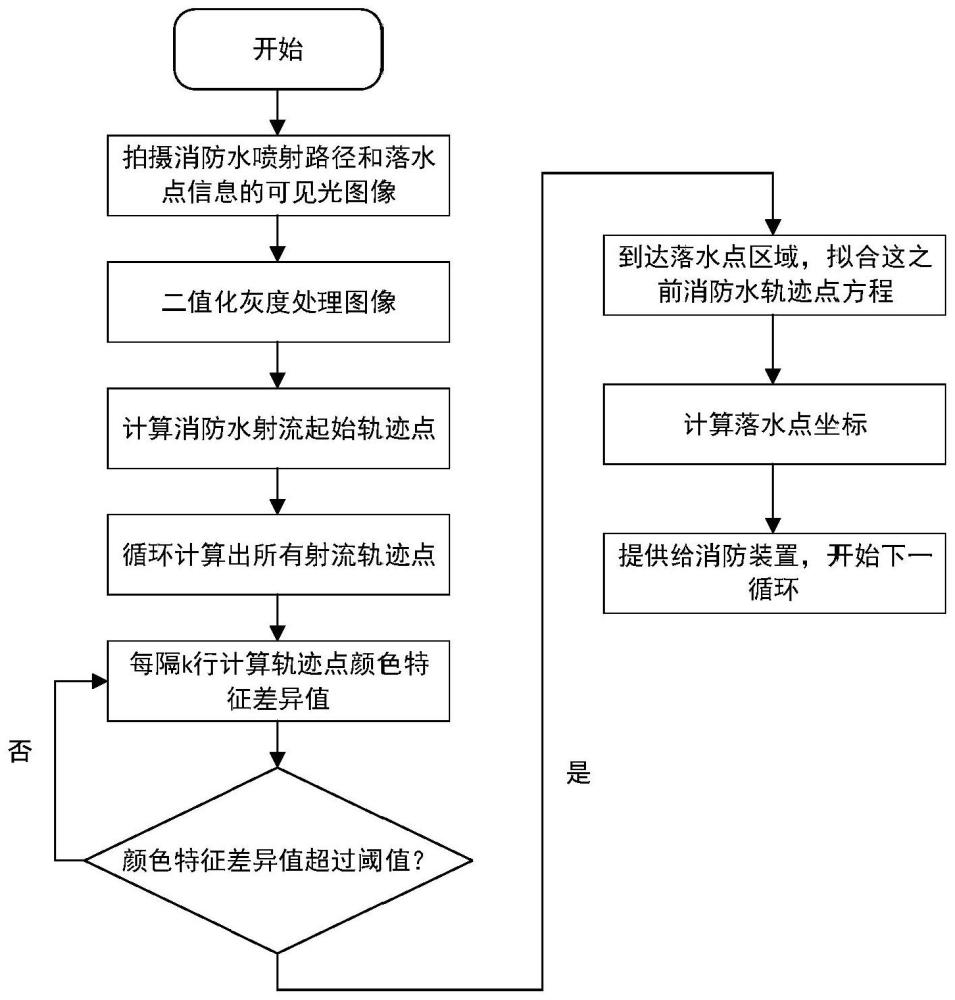
3、一种消防水喷射路径和落水点检测方法,包括以下步骤:
4、步骤1:拍摄包含消防水喷射路径和落水点信息的可见光图像;
5、步骤2:二值化灰度处理可见光图像,确定出高亮的连通区域路径总体范围,记为第一区域;
6、步骤3:从第一区域的最上方第一行像素位置开始扫描,选择灰度值最大的像素点作为射流起始点,如有相同灰度值点则以最右侧点作为射流起始点,将起始点记为n1;
7、步骤4:在射流起始点n1的正下方第二行像素中,左右各选择多个像素点,记灰度值最大的点为s1,计算各像素点与起始射流点n1的rgb三颜色通道的差值的绝对值之和,记三色差值最小的点为s2,取s1和s2像素点中间位置的点为下一消防水射流轨迹点,记为n2;
8、步骤5:以n2为中心,在其正下方的第三行像素中,按步骤4中的方法取样并确定下一射流轨迹点n3;
9、步骤6:按步骤4和步骤5在图像中标记出所有消防水射流轨迹点;
10、步骤7:以k行像素为步长,计算各行轨迹点的颜色特征差值,将超过差异阈值处的消防水射流轨迹点视为到达目标处的落水点区域;
11、步骤8:使用直线方程在视平面内拟合落水点区域之前的所有轨迹点,用最小二乘法求解方程未知系数,得到消防水射流轨迹方程,利用消防水射流轨迹方程计算落水点坐标。
12、进一步地,步骤2中所述的二值化灰度处理可见光图像的方法如下:使用最大熵准则计算可见光图像的最优灰度阈值td,将灰度值高于td的像素灰度值置1,灰度值低于td的像素灰度值置0。
13、进一步地,步骤2中所述的最优灰度阈值td的计算方法如下:设最优灰度阈值td=s,s取值在0-255之间,可见光图像在灰度级s处被分隔为背景和前景,分别记为a区,和b区,,a和b区的信息熵之和计算公式如下:
14、
15、
16、
17、
18、iimage=i(a)+i(b)
19、其中,ni表示图像中灰度级等于i的像素点数量,n表示整张图像的像素数量,pi为灰度级i的像素出现概率,ps表示灰度级从0到s出现的概率之和,i(a)和i(b)分别表示背景a区和前景b区信息熵,iimage表示整张图像的信息熵;求解上式,当iimage取最大值时,计算所得的灰度级s即为步骤2中所述的最优灰度阈值td。
20、进一步地,步骤4中所述的计算各像素点与起始射流点n1的rgb三颜色通道的差值的绝对值之和的公式如下:
21、c=|rpi-rn|+|gpi-gn|+|bpi-bn|
22、其中,rpi为像素点pi的r颜色通道下的灰度级,rn为前一射流轨迹点的r通道下的灰度级;gpi为像素点pi的g颜色通道下的灰度级,gn为前一射流轨迹点的g通道下的灰度级;bpi为像素点pi的b颜色通道下的灰度级,bn为前一射流轨迹点的b通道下的灰度级。
23、进一步地,步骤7中所述的计算各行轨迹点的颜色特征差值的公式为:
24、tc=c(n(i+k)-n(i))+|d(n(i+k))-d(n(i))|
25、其中,c(n(i+k)-n(i))是第i+k行的轨迹点与第i行轨迹点的rgb三通道颜色差值,d(n(i))是第i行轨迹点的灰度值。
26、进一步地,步骤7中所述的颜色特征差值定义为灰度级差值和rgb三色通道的差值的绝对值之和。
27、进一步地,步骤8中所述的使用直线方程在视平面内拟合落水点区域之前的所有轨迹点,用最小二乘法求解方程未知系数,得到消防水射流轨迹方程,利用消防水射流轨迹方程计算落水点坐标的计算公式具体如下:
28、设直线方程为t=ax+b,式中的参数按下式求出:
29、
30、
31、落水点位于消防水射流轨迹终止区域,落水点的坐标满足实际y坐标值与拟合结果差值最小,即:
32、mmin|yi-axi-b|
33、式中xi、yi分别为射流轨迹点在消防炮视平面坐标系的坐标值,n为轨迹点数量,x和y为拟合曲线的函数变量。
34、一种消防系统,包括:可见光相机,可调节消防水炮、mcu计算模块;
35、所述的可见光相机用于拍摄包含消防水喷射路径和落水点信息的可见光图像;
36、所述的mcu计算模块设置在消防水炮的控制计算端,存储有权利要求1-6任一项所述的消防水喷射路径和落水点检测方法的计算机程序,用于对可见光相机拍摄的可见光图像进行分析计算,从而获得消防水喷射路径轨迹方程和落水点的坐标信息;
37、所述的可调节消防水炮用于根据消防水喷射路径轨迹方程和落水点坐标,调节水平、俯仰角度。
38、进一步地,所述的可见光相机拍摄的照片为8bit色深图像。
39、本发明的优点在于:
40、本发明通过可见光相机拍摄照片,分析包含消防水路径轨迹和落水点的可见光图像,计算路径轨迹方程和落水点坐标,根据落水点和着火点坐标位置动态调整消防水供给端装置的俯仰角和水平回转角,实现高效精准灭火需求;可有效克服火源距离远、环境风多变、落水点定位难度大等对处置火灾的不利因素,提高消防机器人、消防炮等消防装置的火灾处置效率和精度。
41、本发明提供的消防水喷射路径和落水点检测算法执行速度快,计算精度高,可为消防机器人、消防炮等消防装置提供消防水轨迹方程和落水点坐标,辅助调整精确定位到火源位置。
42、本发明提供的方法克服了传统人工手动调整的速度慢、精度差、受不利因素影响多等缺点,能辅助人工在火灾处置现场实现高效精准操作。
43、本发明提供的方法适用性强,对消防水炮高度、喷射角度等无限制要求,对不同火灾场景适应性强,能一定程度克服环境风对消防水路径和落水点的影响。
技术特征:1.一种消防水喷射路径和落水点检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的消防水喷射路径和落水点检测方法,其特征在于,步骤2中所述的二值化灰度处理可见光图像的方法如下:使用最大熵准则计算可见光图像的最优灰度阈值td,将灰度值高于td的像素灰度值置1,灰度值低于td的像素灰度值置0。
3.根据权利要求2所述的消防水喷射路径和落水点检测方法,其特征在于,进一步地,所述的最优灰度阈值td的计算方法如下:设最优灰度阈值td=s,s取值在0-255之间,可见光图像在灰度级s处被分隔为背景和前景,分别记为a区,和b区,,a和b区的信息熵之和计算公式如下:
4.根据权利要求3所述的消防水喷射路径和落水点检测方法,其特征在于,步骤4中所述的计算各像素点与起始射流点n1的rgb三颜色通道的差值的绝对值之和的公式如下:
5.根据权利要求4所述的消防水喷射路径和落水点检测方法,其特征在于,步骤7中所述的计算各行轨迹点的颜色特征差值的公式为:
6.根据权利要求5所述的消防水喷射路径和落水点检测方法,其特征在于,步骤7中所述的颜色特征差值定义为灰度级差值和rgb三色通道的差值的绝对值之和。
7.根据权利要求6所述的消防水喷射路径和落水点检测方法,其特征在于,步骤8中所述的使用直线方程在视平面内拟合落水点区域之前的所有轨迹点,用最小二乘法求解方程未知系数,得到消防水射流轨迹方程,利用消防水射流轨迹方程计算落水点坐标的计算公式具体如下:
8.一种消防系统,其特征在于,包括:可见光相机,可调节消防水炮、mcu计算模块;
9.根据权利要求8所述的消防系统,其特征在于,所述的可见光相机拍摄的照片为8bit色深图像。
技术总结一种消防水喷射路径和落水点检测方法及消防系统,属于消防自动化技术领域,解决如何准确判断消防水喷射轨迹和落水点位置的问题;本发明通过可见光相机拍摄照片,分析包含消防水路径轨迹和落水点的可见光图像,计算路径轨迹方程和落水点坐标,根据落水点和着火点坐标位置动态调整消防水供给端装置的俯仰角和水平回转角,实现高效精准灭火需求;本发明的方法可有效克服火源距离远、环境风多变、落水点定位难度大等对处置火灾的不利因素,提高消防机器人、消防炮等消防装置的火灾处置效率和精度。技术研发人员:何旸,张佳庆,过羿,刘睿,黄玉彪,程宜风,尚峰举,田梦洁,何灵欣,付贤玲受保护的技术使用者:国网安徽省电力有限公司电力科学研究院技术研发日:技术公布日:2024/2/19本文地址:https://www.jishuxx.com/zhuanli/20240617/45765.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。