一种载有多角度旋转水炮组件的消防灭火机器人的制作方法
- 国知局
- 2024-07-05 17:24:10
本发明属于消防机器人,具体涉及一种载有多角度旋转水炮组件的消防灭火机器人。
背景技术:
1、随着经济发展与社会进步,消防灭火机器人已经越来越多地应用于各行各业的消防灭火作业中,尤其是有易燃、易爆、有毒气体存在的火灾现场,消防人员难以进入或靠近火灾现场,此时,消防灭火机器人优势更为明显。
2、消防水炮作为消防灭火机器人的重要组成部分,需要快速、准确瞄准起火点喷水灭火,若操作费时费力,容易因灭火不及时导致火势变大,错失灭火最佳时机。因此,消防水炮既需要满足多角度多方位的喷射角度调节,又要能快速灵活调节,节省操作时间。
3、目前,消防水炮的喷射角度调节大多通过水平旋转调节以及垂向俯仰调节来实现,如授权公告号cn106166351b的发明专利公开的一种消防水炮,授权公告号cn219896896u的实用新型专利公开的一种全方位旋转的消防水炮,授权公告号cn219355175u的实用新型专利公开的一种具有多角度调节喷射角度的消防水炮,该类型的消防水炮通过水平调整和俯仰调整分别调节水炮喷射角度,喷射角度不够全面,操作不够灵活。
技术实现思路
1、本发明的目的在于提供一种可以根据需要任意调整水炮的旋转角度,能够调节喷出水流大小,安全稳定的载有多角度旋转水炮组件的消防灭火机器人。
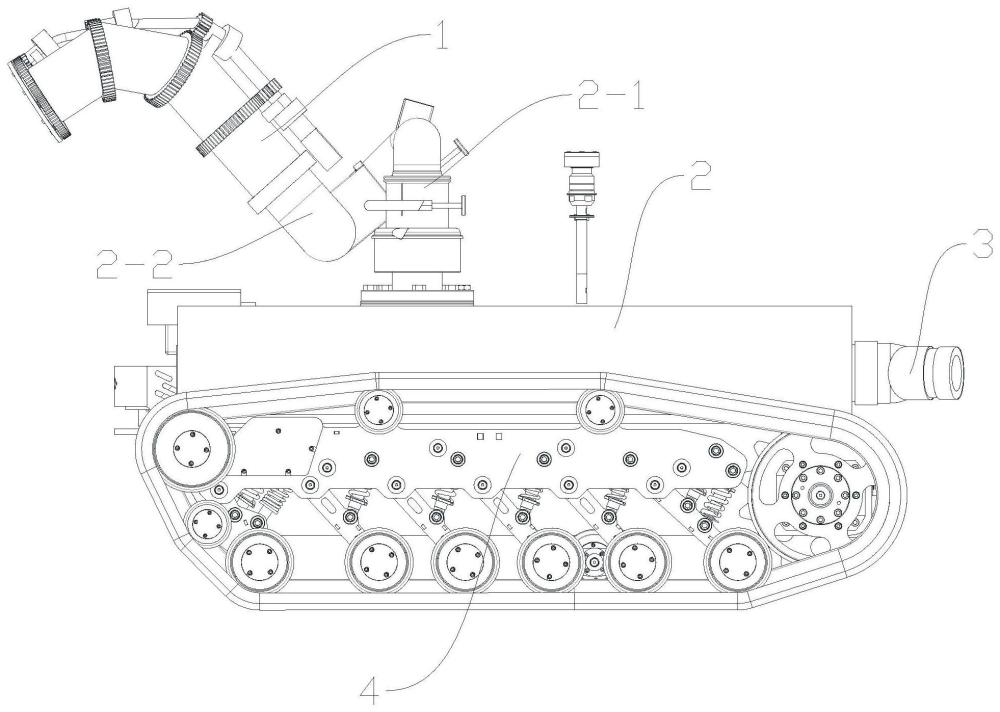
2、本发明解决其技术问题所采用的技术方案是:一种载有多角度旋转水炮组件的消防灭火机器人,包括机器人本体、安装于机器人本体后部的水带组件、安装于机器人下部用于带动机器人运动的移动组件,还包括安装于机器人本体前部的旋转水炮组件,以及安装机器人本体内部的控制组件;所述旋转水炮组件与水带组件连接,旋转水炮组件、水带组件、移动组件均与控制组件连接;
3、所述旋转水炮组件包括按照不同的倾斜角度依次转动连接的多级水炮桶,相邻水炮桶之间通过对应的各级传动机构连接,最前端的水炮桶的前端设有闭合组件,闭合组件与闭合传动机构连接,各级传动机构与闭合传动机构依次柔性连接。
4、进一步地,所述多级水炮桶包括零级水炮桶、一级水炮桶、二级水炮桶、三级水炮桶,零级水炮桶与一级水炮桶之间连接有一级传动机构,零级水炮桶与一级水炮桶位于同一直线上,一级水炮桶与二级水炮桶之间连接有二级传动机构,一级水炮桶与二级水炮桶倾斜设置,二级水炮桶与三级水炮桶之间连接有三级传动机构,二级水炮桶与三级水炮桶倾斜设置,三级水炮桶的前端设有闭合组件,闭合组件与闭合传动机构连接,一级传动机构、二级传动机构、三级传动机构与闭合传动机构依次柔性连接。
5、进一步地,所述零级水炮桶连接有零级电机,零级电机用于驱动零级水炮桶带动一级水炮桶、二级水炮桶、三级水炮桶整体转动。
6、进一步地,所述一级传动机构包括一级电机、一级小齿轮和一级大齿轮,一级电机通过固定支架安装于零级水炮桶的外壁上,一级电机的输出轴与一级小齿轮连接,一级小齿轮与一级大齿轮啮合连接,一级大齿轮的前端面与一级水炮桶的后端固定连接,一级大齿轮的后端面与零级水炮桶的前端转动连接,一级小齿轮连接有一级柔式传动轴,一级柔式传动轴与二级传动机构连接。
7、进一步地,所述二级传动机构包括二级电机、二级小齿轮和二级大齿轮,二级电机通过固定支架安装于一级水炮桶的外壁上,二级电机与一级柔式传动轴连接,二级电机的输出轴与二级小齿轮连接,二级小齿轮与二级大齿轮啮合连接,二级大齿轮的前端面与二级水炮桶的后端固定连接,二级大齿轮的后端面与一级水炮桶的前端转动连接,二级小齿轮连接有二级柔式传动轴,二级柔式传动轴与三级传动机构连接。
8、进一步地,所述三级传动机构包括三级电机、三级小齿轮和三级大齿轮,三级电机通过固定支架安装于二级水炮桶的外壁上,三级电机与二级柔式传动轴连接,三级电机的输出轴与三级小齿轮连接,三级小齿轮与三级大齿轮啮合连接,三级大齿轮的前端面与三级水炮桶的后端固定连接,三级大齿轮的后端面与二级水炮桶的前端转动连接,三级小齿轮连接有三级柔式传动轴,三级柔式传动轴与闭合传动机构连接。
9、进一步地,所述闭合传动机构包括闭合电机、闭合小齿轮和闭合大齿轮,闭合电机通过固定支架安装于三级水炮桶的外壁上,闭合电机的输出轴与闭合小齿轮连接,闭合小齿轮与闭合大齿轮啮合连接,闭合大齿轮与闭合组件连接。
10、进一步地,所述闭合电机与三级柔式传动轴连接。
11、进一步地,为保证零级水炮桶、一级水炮桶、二级水炮桶、三级水炮桶依次连通,所述一级大齿轮、二级大齿轮、三级大齿轮、闭合大齿轮均为环形齿轮。
12、进一步地,所述闭合组件包括闭合上盖和闭合件,闭合上盖为圆环形,闭合上盖的中心设有出水孔,闭合上盖固定连接于闭合大齿轮的前端,闭合件设置于闭合大齿轮与闭合上盖之间,闭合件设置有多组,多组闭合件之间滑动连接,闭合大齿轮的前端面上设有闭合齿轮槽,每组闭合件的后端面上设有配合块,闭合件通过配合块滑动连接于闭合齿轮槽内,闭合上盖上设有与闭合件数量一致且位置对应的限位通槽,每组闭合件的前端面上连接有限位挡块,限位挡块置于对应的限位通槽内且能在限位通槽内滑动,闭合大齿轮转动,带动多组闭合件转动,多组闭合件之间相对滑动,实现对出水孔的开启或关闭。
13、进一步地,每组所述闭合件的一侧设有闭合件凸起,另一侧设有闭合件凹槽,每组闭合件通过闭合件凸起与前一组闭合件的闭合件凹槽滑动连接,每组闭合件的闭合件凹槽与后一组闭合件的闭合件凸起滑动连接,所有闭合件的圆心角之和为360°。
14、进一步地,所述机器人本体上安装有水炮云台,水炮云台上安装有水炮连接件,水炮连接件与零级水炮桶连接。
15、本发明具有以下有益效果:
16、1、本发明载有多角度旋转水炮组件的消防灭火机器人,通过多级水炮桶按照不同的倾斜角度依次连接,每一级水炮桶的旋转由对应的传动机构独立控制,可以根据需要任意调整水炮的旋转角度、喷射方向,实现全方位转动、喷射,操作灵活快速,易于控制,使消防灭火机器人能够适应不同的灭火环境。
17、2、本发明载有多角度旋转水炮组件的消防灭火机器人,通过闭合电机控制闭合件旋转,实现出水孔的开启、关闭,防止杂物、灰尘等进入旋转水炮组件,还可以通过调整闭合件的开启程度控制出水孔的孔径大小,从而调节喷出的水流大小,满足不同的灭火需求。
18、3、本发明载有多角度旋转水炮组件的消防灭火机器人,各级传动机构之间通过柔式传动轴连接,既能满足各级水炮桶的旋转要求,又能对水炮桶起支撑连接作用,提高旋转水炮组件的稳定性和安全性。
技术特征:1.一种载有多角度旋转水炮组件的消防灭火机器人,包括机器人本体、安装于机器人本体后部的水带组件、安装于机器人下部用于带动机器人运动的移动组件,其特征在于,还包括安装于机器人本体前部的旋转水炮组件,以及安装机器人本体内部的控制组件;所述旋转水炮组件与水带组件连接,旋转水炮组件、水带组件、移动组件均与控制组件连接;
2.如权利要求1所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述多级水炮桶包括零级水炮桶、一级水炮桶、二级水炮桶、三级水炮桶,零级水炮桶与一级水炮桶之间连接有一级传动机构,零级水炮桶与一级水炮桶位于同一直线上,一级水炮桶与二级水炮桶之间连接有二级传动机构,一级水炮桶与二级水炮桶倾斜设置,二级水炮桶与三级水炮桶之间连接有三级传动机构,二级水炮桶与三级水炮桶倾斜设置,三级水炮桶的前端设有闭合组件,闭合组件与闭合传动机构连接,一级传动机构、二级传动机构、三级传动机构与闭合传动机构依次柔性连接。
3.如权利要求2所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述零级水炮桶连接有零级电机,零级电机用于驱动零级水炮桶带动一级水炮桶、二级水炮桶、三级水炮桶整体转动。
4.如权利要求2所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述一级传动机构包括一级电机、一级小齿轮和一级大齿轮,一级电机通过固定支架安装于零级水炮桶的外壁上,一级电机的输出轴与一级小齿轮连接,一级小齿轮与一级大齿轮啮合连接,一级大齿轮的前端面与一级水炮桶的后端固定连接,一级大齿轮的后端面与零级水炮桶的前端转动连接,一级小齿轮连接有一级柔式传动轴,一级柔式传动轴与二级传动机构连接。
5.如权利要求4所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述二级传动机构包括二级电机、二级小齿轮和二级大齿轮,二级电机通过固定支架安装于一级水炮桶的外壁上,二级电机与一级柔式传动轴连接,二级电机的输出轴与二级小齿轮连接,二级小齿轮与二级大齿轮啮合连接,二级大齿轮的前端面与二级水炮桶的后端固定连接,二级大齿轮的后端面与一级水炮桶的前端转动连接,二级小齿轮连接有二级柔式传动轴,二级柔式传动轴与三级传动机构连接。
6.如权利要求5所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述三级传动机构包括三级电机、三级小齿轮和三级大齿轮,三级电机通过固定支架安装于二级水炮桶的外壁上,三级电机与二级柔式传动轴连接,三级电机的输出轴与三级小齿轮连接,三级小齿轮与三级大齿轮啮合连接,三级大齿轮的前端面与三级水炮桶的后端固定连接,三级大齿轮的后端面与二级水炮桶的前端转动连接,三级小齿轮连接有三级柔式传动轴,三级柔式传动轴与闭合传动机构连接。
7.如权利要求2-6任一所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述闭合传动机构包括闭合电机、闭合小齿轮和闭合大齿轮,闭合电机通过固定支架安装于三级水炮桶的外壁上,闭合电机的输出轴与闭合小齿轮连接,闭合小齿轮与闭合大齿轮啮合连接,闭合大齿轮与闭合组件连接。
8.如权利要求7所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述闭合组件包括闭合上盖和闭合件,闭合上盖为圆环形,闭合上盖的中心设有出水孔,闭合上盖固定连接于闭合大齿轮的前端,闭合件设置于闭合大齿轮与闭合上盖之间,闭合件设置有多组,多组闭合件之间滑动连接,闭合大齿轮的前端面上设有闭合齿轮槽,每组闭合件的后端面上设有配合块,闭合件通过配合块滑动连接于闭合齿轮槽内,闭合上盖上设有与闭合件数量一致且位置对应的限位通槽,每组闭合件的前端面上连接有限位挡块,限位挡块置于对应的限位通槽内且能在限位通槽内滑动,闭合大齿轮转动,带动多组闭合件转动,多组闭合件之间相对滑动,实现对出水孔的开启或关闭。
9.如权利要求8所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,每组所述闭合件的一侧设有闭合件凸起,另一侧设有闭合件凹槽,每组闭合件通过闭合件凸起与前一组闭合件的闭合件凹槽滑动连接,每组闭合件的闭合件凹槽与后一组闭合件的闭合件凸起滑动连接,所有闭合件的圆心角之和为360°。
10.如权利要求1所述的载有多角度旋转水炮组件的消防灭火机器人,其特征在于,所述机器人本体上安装有水炮云台,水炮云台上安装有水炮连接件,水炮连接件与零级水炮桶连接。
技术总结本发明属于消防机器人技术领域,涉及一种载有多角度旋转水炮组件的消防灭火机器人,旋转水炮组件包括按照不同的倾斜角度依次转动连接的多级水炮桶,相邻水炮桶之间通过对应的各级传动机构连接,通过多级水炮桶按照不同的倾斜角度依次连接,每一级水炮桶的旋转由对应的传动机构独立控制,可以根据需要任意调整水炮的旋转角度、喷射方向,实现全方位转动、喷射,操作灵活快速,易于控制,使消防灭火机器人能够适应不同的灭火环境。通过闭合电机控制闭合件旋转,调节出水孔的孔径大小,各级传动机构之间通过柔式传动轴连接,既能满足各级水炮桶的旋转要求,又能对水炮桶起支撑连接作用,提高旋转水炮组件的稳定性。技术研发人员:谢北萍,鲍明松,孙洪秀,郑安,姬增起,姚世伟,贾卫国受保护的技术使用者:中国船舶重工集团应急预警与救援装备股份有限公司技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240617/47500.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表