一种可以爬壁的消防机器人的制作方法
- 国知局
- 2024-07-05 17:38:33
本发明涉及机器人设备,更具体的说是涉及一种可以爬壁的消防机器人。
背景技术:
1、随着社会的发展,高层建筑在不断增加的同时也越建越高,而高层建筑消防灭火救援也变得越发困难,现有的消防设备最大升幅高度在100米以下,一旦高层建筑发生火灾,消防通道被浓烟笼罩,消防队员则无法进行消防灭火,容易导致重大财产损失以及危及被困人员的生命安全,进而出现了可以用于消防的爬墙机器人。
2、现有的爬墙机器人主要分为吸盘式爬墙机器人和磁性爬墙机器人,吸盘式爬墙机器人主要采用吸盘在墙面上产生真空,使自身固定在墙面上并移动,磁性爬墙机器人利用磁性吸附在金属表面上,并通过磁力来保持自身在墙面上的稳定,但由于在消防工作时,需要携带水管和一些救援物质,机器人整体负载较大,现有的机器人在进行消防灭火的过程中,由于水枪较强的后坐力,使得机器人从墙体上脱落,不仅影响救援速度,还会造成设备的损毁,同时对建筑下方的救援人员造成威胁。
3、现有公开号为cn111013067a的专利公开了一种可以爬壁的折臂式消防机器人,它包括定位法兰盘,所述定位法兰盘的背面活动连接有隔断机构,所述定位法兰盘的正面固定连接有螺纹块,所述定位法兰盘的正面活动连接有安装座,所述安装座的内部活动连接有从动齿轮,所述安装座的内部活动连接有卡爪,所述卡爪的内部活动连接有调节螺栓。该可以爬壁的折臂式消防机器人,具备结构简单、安装方便的优点,解决了现有消防水枪与水管的连接处连接件较多的问题,减少了消防水枪连接件的自重,有效地避免了因自重太大导致的爬墙机器人从墙体脱落的问题,不仅安装更加快捷、结构更加简单,而且还能提高救援的效率,一定程度上避免了机器人从高空脱落可能造成的安全隐患,这种消防机器人虽然结构简单,安装方便,能够减少爬墙机器人因自身重量太大从墙体脱落的问题,但上述装置未考虑由于火灾发生的环境不同,导致机器人在不同环境下吸附力不一致,消防水枪在进行消防工作时产生对机器人自身的后坐力,导致爬墙机器人在使用过程中从墙体脱落的情况,进而影响装置整体的工作效率。
4、鉴于以上情况,本发明设计了一种可以爬壁的消防机器人,解决了上述技术问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种可以爬壁的消防机器人,该设备解决不同环境下,爬墙机器人吸附力不一致,消防水枪工作时对爬墙机器人本体产生的后坐力,导致机器人从建筑表面脱落,影响装置整体工作效率的问题。
2、为实现上述目的,本发明提供了如下技术方案:
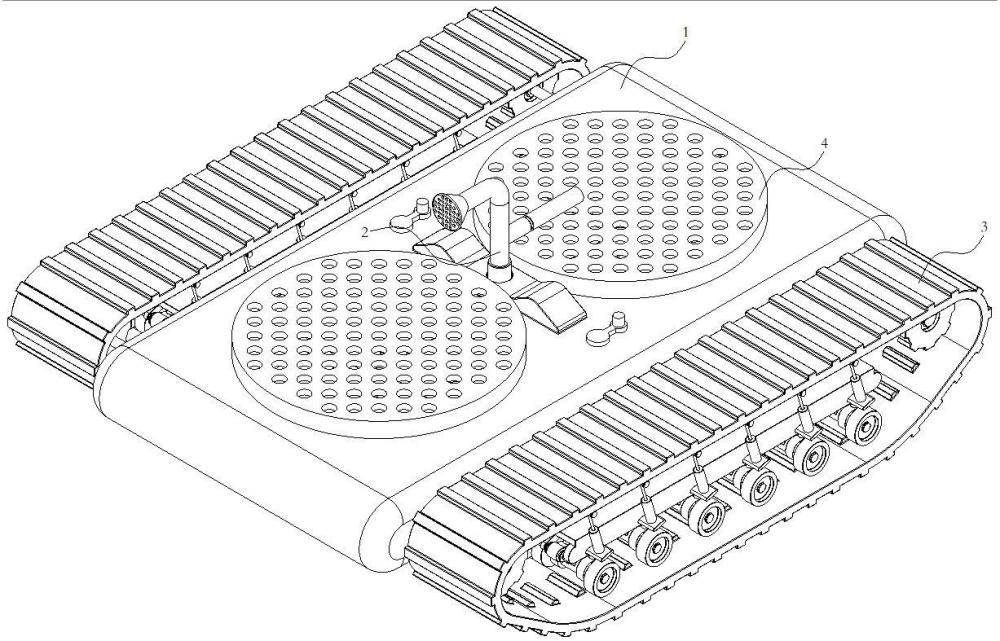
3、一种可以爬壁的消防机器人,包括机器人本体、灭火机构、驱动机构和吸附机构,所述机器人本体两侧对称安装有驱动机构,所述机器人本体依靠驱动机构保持自身的平稳和移动,所述驱动机构的中间位置安装有灭火机构,所述灭火机构下方安装有吸附机构,且吸附机构安装在机器人本体内部,所述驱动机构带动机器人本体移动时,吸附机构中的扇叶转动产生负压,使得机器人本体吸附在建筑物表面,所述机器人本体运动到起火位置,吸附机构中的固定组件配合灭火机构同时启动;
4、所述吸附机构(4)包括固定架(41)、扇叶(42)、保护罩(43)和固定组件(44),所述机器人本体(1)左右两侧均安装有固定架(41),所述固定架(41)上安装有扇叶(42),所述扇叶(42)上方安装有保护罩(43),所述两侧扇叶(42)的中间位置设有固定组件(44),所述固定组件(44)安装在机器人本体(1)内部;
5、所述固定组件(44)包括转动杆(441)、密封盖(442)、输气腔(443)、吸盘(444)、波纹管(445)和电磁铁(446),所述机器人本体(1)上安装有转动杆(441),所述转动杆(441)上转动安装有密封盖(442),所述密封盖(442)下方机器人本体(1)上开设有输气腔(443),所述输气腔(443)上开设有三个出气口,其中两个出气口与吸盘(444)相连接,另一个出气口与波纹管(445)相连接,所述波纹管(445)下方连接有电磁铁(446);
6、所述电磁铁(446)上开设有限位槽(4461),所述电磁铁(446)运动腔内安装有与限位槽(4461)相配合的限位环(4462),所述限位槽(4461)的长度与波纹管(445)被压缩后的长度一致。
7、作为本发明的进一步改进,所述驱动机构包括履带、驱动轮、连接杆、气缸、固定板、连接板、辅助轮、固定杆和弹簧,所述履带内侧安装有两个驱动轮,所述两个驱动轮分别安装在履带内侧两端,所述驱动轮通过连接杆连接,所述连接杆两侧对称安装有多个气缸,相邻两个气缸下方连接有连接板,所述连接板贯穿固定板安装,所述连接板的一端安装有辅助轮,连接板的另一端连接有固定杆,所述固定杆分为固定端和活动端,所述固定杆上设有弹簧。
8、作为本发明的进一步改进,所述灭火机构包括输水管、水管固定座、出水管、喷淋头和安装座,所述机器人本体中部安装有安装座,所述安装座上转动安装有水管固定座,所述水管固定座绕安装座转动360°;所述水管固定座右侧设有输水管,所述输水管与出水管的一端连通,所述出水管的另一端连接有喷淋头。
9、作为本发明的进一步改进,所述喷淋头为圆台状,所述圆台状远离出水管的一端开设有喷淋孔,且喷淋孔为锥形结构。
10、作为本发明的进一步改进,所述固定架上环形阵列多个扇叶,所述扇叶为弧形结构。
11、作为本发明的进一步改进,所述保护罩上开设有排气孔,所述排气孔为上端小下端大的锥形结构。
12、本发明的有益效果:
13、1、本发明提供的一种可以爬壁的消防机器人,该设备通过驱动机构和吸附机构相配合,当火灾发生的环境不同,建筑表面凹凸不平时,驱动机构可以使得爬墙机器人平稳通过,避免移动过程中,爬墙机器人出现左右晃动,导致爬墙机器人从墙体脱落的现象,同时驱动机构配合吸附机构,当爬墙机器人到达指定位置进行消防灭火时,可减少爬墙机器人与墙体之间的距离,通过吸附机构提高爬墙机器人对墙体的吸附能力,保证工作过程中,爬墙机器人能够获得足够的吸附力,避免出现吸附力过小导致爬墙机器人从建筑表面脱落的情况,进而提高了装置的使用寿命,同时保证了装置整体的工作效率。
14、2、本发明提供的一种可以爬壁的消防机器人,该设备通过灭火机构实现对着火点部分进行大面积的灭火剂覆盖,同时通过水管固定座与安装座转动安装,使得爬墙机器人在建筑表面移动过程中,消防水管可始终保持与建筑表面平行,不会因为爬墙机器人移动出现消防水管折叠现象,影响救援进度,同时消防水管也不会阻碍爬墙机器人的移动,避免移动过程中,消防水管晃动导致爬墙机器人脱落,影响消防救援工作的进度。
15、3、本发明提供的一种可以爬壁的消防机器人,该设备通过吸附组件实现爬墙机器人对建筑表面产生足够的吸附力,使得爬墙机器人能够在建筑表面灵活移动,通过固定组件保证消防机器人在工作时,爬墙机器人能够在建筑表面固定,避免消防水管在工作时产生的较大后坐力使得爬墙机器人从建筑表面脱落,影响整体的工作效率和救援进度。
本文地址:https://www.jishuxx.com/zhuanli/20240617/48461.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种可自动灭火的储物柜
下一篇
返回列表