一种非固定支撑力式无源助力上肢外骨骼机械臂
- 国知局
- 2024-07-05 17:44:57
:本技术属于可穿戴机械设备,具体涉及一种支撑力可变的非固定支撑力式无源助力上肢外骨骼机械臂。
背景技术
0、背景技术:
1、现有技术中的人体外骨骼按照是否借助能源驱动分为有源外骨骼和无源外骨骼:有源外骨骼通过连接能源供应设备进而驱动机器运动,受能源存储设备的技术限制,其能量储备有限,影响户外应用场景下的使用;无源外骨骼通过自身机械结构,将负重转移到地面或者人体上的合理位置,不需要外部能源的供应,在消除能源限制的同时,降低设备重量,实现了轻量化。
2、与有源外骨骼相比,无源外骨骼的能源主要来自于人体本身,不受续航问题限制,可以一直持续使用。另外,无源外骨骼无需电机、控制系统等部件,自重相对较轻,制作成本较低,安全性较高,更有机会被推广应用。
3、上肢无源外骨骼是一种非动力辅助外骨骼机器人,即不受能量设备等非自然外力驱动。与传统动力外骨骼相比,其在体积和重量大大减少,而且没有能源动力需求,解决了动力型外骨骼长期以来存在的缺点,符合当前倡导的能源可持续发展的理念。
4、上肢无源外骨骼在结构上主要由大臂支撑件、背部支撑件、腰部支撑件、传动连杆和驱动器五部分组成。目前的上肢无源外骨骼在技术层面已经趋于成熟,比较知名的厂家和产品有:
5、美国加州ekso bionics公司是无源外骨骼领域的开辟者和领导者,其生产的eksovest由大臂支撑、背部支撑、腰部支撑、传动连杆及驱动器构成,结构轻巧、跟随性能好,不会影响穿戴者正常工作,通用性良好,用户可根据自身生物尺寸数据及作业所需助力范围选择合适的外骨骼;佩戴使用时助力外骨骼跟随穿戴者运动并对人体进行支撑助力。其生产的二代上肢无源助力外骨骼产品ekso evo,是对ekso vest的升级,简化了上一代复杂的背部传动连杆结构,仅由腰部支撑、背部支撑、驱动器与大臂支撑组成,背部支撑整合了多方向旋转结构,在使用过程中可配合用户动作实现多方向的贴合运动,更为轻巧且减少背部空间的占用。
6、意大利的菲亚特克莱斯勒(fca)集团成员之一柯马(comau)推出的针对汽车装配生产场景的上肢无源助力外骨骼的解决方案——mate(muscular aiding techexoskeleton),能够在日常劳作中为肩膀和手臂提供支撑,特别是要求手臂抬起的工作,可有效减小劳动者上肢的“过载性损伤风险”。
7、位于欧洲的喜利得公司(hilti),是一家为建筑行业提供高质量的技术和产品的科技公司,提供的针对于建筑行业上肢无源助力外骨骼机器人产品——hilti exo 01,用于缓解头顶安装工作期间的肩部与手臂的压力。
8、加利福尼亚大学伯克利分校人机工程实验室的机器人公司——suitx,推出的上肢无源外骨骼产品——shoulderx,在使用较重的工具进行静态和重复性头顶任务期间,可以显著降低峰值肌肉活动,进而帮助降低与工作相关的肩部疲劳和受伤的风险。
9、对市面上的主要上肢无源外骨骼对比分析如下表:
10、
11、
12、可见,现有的产品在支撑力的实现形式上大同小异:主要形式是通过手臂的转动使弹簧产生形变,以能量的转化提供支撑力,如手臂放下时使弹簧拉长积蓄弹性势能,手臂抬起时弹簧回弹释放能量产生支撑力以支撑手臂抬起。整个过程存在以下缺点:一是手臂放下时,要承受较大的阻力,并且静止状态仍要持续承受阻力,在此状态无法自由地实施操作任务;二是手臂处于最低点时弹簧形变量最大,力最大,手臂抬起时,力逐渐减小,手臂处于最高点时弹簧形变量最小,力最小,手过头作业时手臂需要处于中高位置,但此时弹簧提供的力已经减弱许多,并不契合手过头作业的需要。因此,需要研发设计一种非固定支撑力式无源助力上肢外骨骼机械臂,解决手臂在下落状态仍需承受一定力的问题,改善力的变化曲线。
技术实现思路
0、技术实现要素:
1、本实用新型的目的在于克服现有技术存在的缺点,寻求设计一种非固定支撑力式无源助力上肢外骨骼机械臂,使得手臂在垂直于地面时不受力,抬起45°时开始受支撑力。
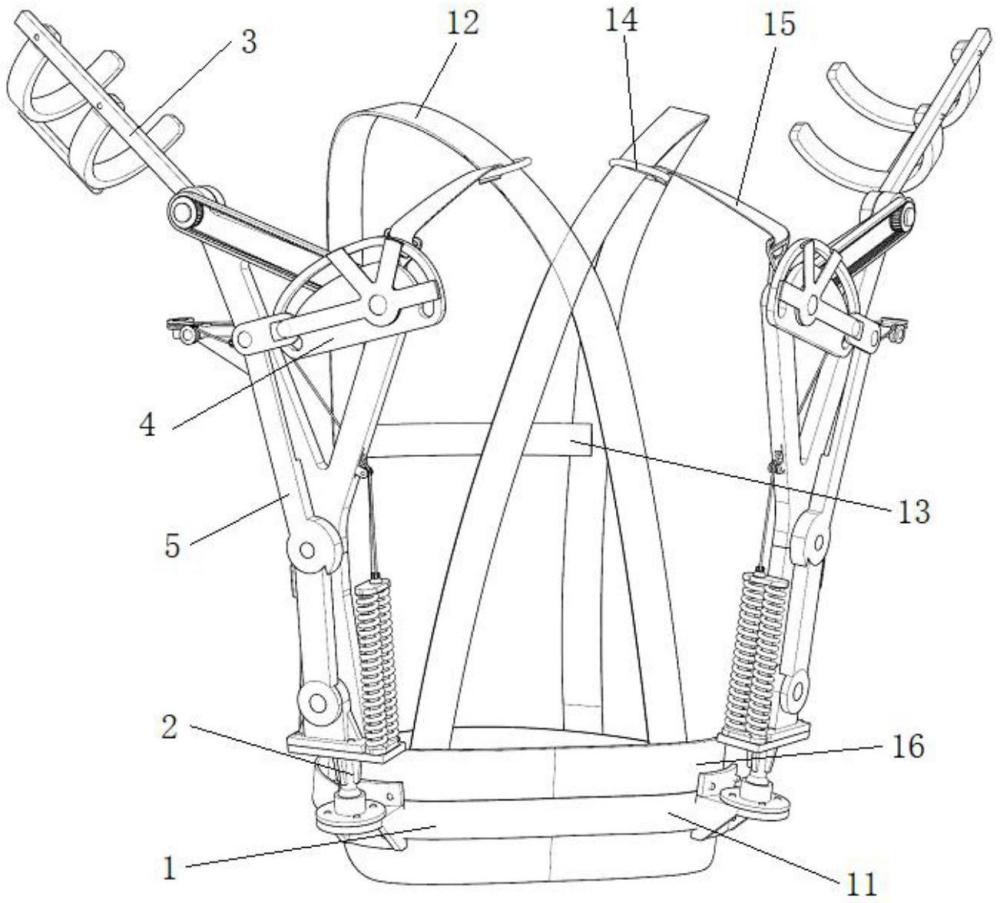
2、为了实现上述目的,本实用新型涉及的非固定支撑力式无源助力上肢外骨骼机械臂的主体结构包括背带组件及其两侧设置的传动组件,以及与传动组件连接的臂部组件,其中,背带组件与臂部组件之间还设置有凸轮组件,传动组件与凸轮组件之间还设置有连杆组件;背带组件的主体结构包括腰带上设置的两条背带和腰板,连接背带前部的胸部连接带,背带后部设置的两条连接带;传动组件的主体结构包括总基座及其上设置的球头连接件,及球头连接件上设置的支架和弹簧,支架上设置有挡板、旋转轴和连接扣,与弹簧连接的线穿过支架上设置的滑轮组;臂部组件的主体结构包括大臂杆及其上设置的臂托,以及连接臂托的小臂杆;凸轮组件的主体结构包括沟槽凸轮及其上设置的同步带;连杆组件的主体结构包括下连杆和上连杆及其之间设置的中旋转轴,以及上连杆上设置的沟槽卡扣;
3、本实用新型涉及的总基座与球头连接件通过球头连接件基座连接,球头连接件与安装板连接,安装板上设置有弹簧底座和支架,弹簧底座上设置有两根互相平行的弹簧内杆,弹簧内杆的外围设置有弹簧,顶部设置有下线固定件,下线固定件上设置的线依次穿过支架上设置的滑轮组:滑轮一、滑轮二、滑轮三和滑轮四,支架的上部呈三角形,三角形的中部镂空,下部呈梯形,梯形的顶部设置有挡板,支架上线的走线路径上开设有走线通道,两个端部及滑轮三和滑轮四处均设置有旋转轴,其中一个端部设置有连接扣基座,连接扣基座上设置有连接扣;臂托与大臂杆和小臂杆均通过固定件连接;沟槽凸轮与同步带通过下同步带轴连接;连杆基座通过下旋转轴与下连杆连接,上连杆的顶部设置有上线固定件,通过上旋转轴与椭圆板连接,椭圆板的端部设置有沟槽卡扣。
4、本实用新型涉及的腰带、背带、胸部连接带和连接带均具有弹性,舒适贴身,可伸缩;连接件为软质塑料制成的环状物;连接带的一端通过背带后部设置的连接件与背带连接,另一端与连接扣连接;腰板为具有支撑强度的高分子材料制成的板状物,与总基座连接;安装板与连杆基座连接;支架顶部通过旋转轴与大臂杆连接,端部通过连接扣处的旋转轴与沟槽凸轮连接;线的另一端与上线固定件连接;沟槽凸轮与沟槽卡扣连接;下同步带轴通过同步带与传动组件和臂部组件连接处设置的上同步带轴连接。
5、本实用新型涉及的非固定支撑力式无源助力上肢外骨骼机械臂佩戴后,手臂从45°抬起至90°的过程与从90°抬起至135°的过程相比,手臂转动的角度相同;在前者中,上连杆和下连杆呈一条直线绕下旋转轴旋转;在后者中,上连杆绕中旋转轴旋转,前者使下线固定件产生的位移小于后者,弹簧产生的型变量也小于后者,弹性势能减小量更少,使得手臂抬起到高频工作角度范围(90°-135°)时,弹簧损失的弹性势能较小,仍能为手臂提供较大的支撑力。
6、本实用新型与现有技术相比,弹簧回缩释放拉力,线经过走线通道和滑轮将拉力传递给上连杆并使其旋转,上连杆旋转时通过椭圆板使沟槽凸轮转动,进一步通过同步带1:1带动手臂抬起,为手臂提供支撑力;其结构简单,原理科学可靠,通过凸轮机构、连杆机构和传动机构解决手臂在下落状态时仍需承受一定力的问题,改善了力的变化曲线,使手臂在垂直于地面时不受力,抬起45°时才开始受支撑力,并在常用高度范围内降低力的减弱幅度。
本文地址:https://www.jishuxx.com/zhuanli/20240617/48998.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
钢管固定支架的制作方法
下一篇
返回列表