用于作业机械的系统、方法以及作业机械与流程
- 国知局
- 2024-07-09 17:16:14
本发明涉及用于作业机械的系统、方法以及作业机械。
背景技术:
1、以往,公知有计算作业机械整体的重心位置而判定作业机械的翻倒的可能性的技术。例如在专利文献1中,作为用于求出液压挖掘机的重心位置的计算模型,使用集中质点模型。在集中质点模型中,视作质量集中在液压挖掘机的各构成部分的重心。液压挖掘机具备大臂、小臂、铲斗、旋转体、行驶体。液压挖掘机的重心位置通过将大臂的重心位置、小臂的重心位置、铲斗的重心位置、旋转体的重心位置、行驶体的重心位置合成来决定。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2019-52499号公报
技术实现思路
1、发明要解决的技术课题
2、作业机械在出厂后,有时构成部分的一部分会更换为另一部件。例如液压挖掘机的铲斗有时会更换为另一种类的配件。或者,旋转体的配重有时会更换为另一规格的结构。在这种情况下,更换后的构成部分的重心位置会从更换前的构成部件的重心位置发生变化。因此,难以高精度地计算作业机械整体的重心位置。本发明的目的在于,在作业机械中,即便在构成部分的一部分被更换后,也能高精度地计算作业机械整体的重心位置。
3、用于解决技术课题的手段
4、本发明的第一方式的系统为用于具有包含第一部分的多个构成部分的作业机械的系统。该系统具备存储装置、输入装置、控制器。存储装置存储多个构成部分各自的重心位置。输入装置接收用于决定第一部分的重心位置的第一参数的输入。控制器基于多个构成部分的重心位置,计算作业机械整体的重心位置。控制器在利用输入装置输入第一参数时,根据第一参数,设定第一部分的重心位置。控制器基于包含所设定的第一部分的重心位置的多个构成部分的重心位置,设定作业机械整体的重心位置。
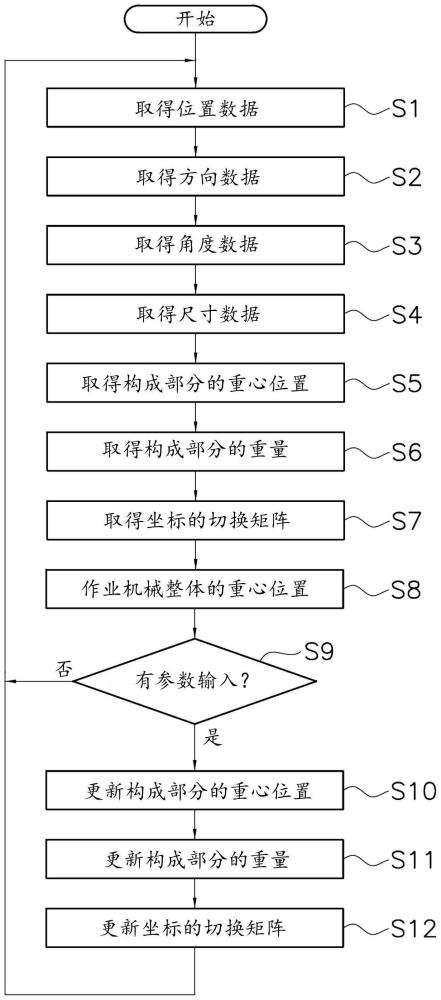
5、本发明的第二方式的方法是用于控制具有包含第一部分的多个构成部分的作业机械的方法。该方法具备:取得多个构成部分各自的重心位置;基于多个构成部分的重心位置,计算作业机械整体的重心位置;经由输入装置,接收用于决定第一部分的重心位置的第一参数的输入;在利用输入装置输入了第一参数时,根据第一参数,设定第一部分的重心位置;基于包含所设定的第一部分的重心位置的多个构成部分的重心位置,设定作业机械整体的重心位置。
6、本发明的第三方式的作业机械具备:多个构成部分、存储装置、输入装置、控制器。多个构成部分包含第一部分。存储装置存储多个构成部分各自的重心位置。输入装置接收用于决定第一部分的重心位置的第一参数的输入。控制器基于多个构成部分的重心位置,计算作业机械整体的重心位置。控制器在利用输入装置输入第一参数时,根据第一参数,设定第一部分的重心位置。控制器基于包含所设定的第一部分的重心位置的多个构成部分的重心位置,设定作业机械整体的重心位置。
7、发明效果
8、根据本发明,在作业机械的第一部分更换的情况下,更换后的第一部分的第一参数通过经由输入装置输入,设定第一部分的重心位置。然后,基于所设定的第一部分的重心位置,计算作业机械整体的重心位置。由此,即便第一部件更换后,也能高精度地计算作业机械整体的重心位置。
技术特征:1.一种系统,其为用于作业机械的系统,所述作业机械具有包含第一部分的多个构成部分,其特征在于,具备:
2.如权利要求1所述的系统,其特征在于,
3.如权利要求1所述的系统,其特征在于,
4.如权利要求1所述的系统,其特征在于,
5.如权利要求1至4中任一项所述的系统,其特征在于,
6.如权利要求5所述的系统,其特征在于,
7.如权利要求5所述的系统,其特征在于,
8.如权利要求5所述的系统,其特征在于,
9.如权利要求1至4中任一项所述的系统,其特征在于,
10.如权利要求5至8中任一项所述的系统,其特征在于,
11.如权利要求1至10所述的系统,其特征在于,
12.如权利要求1至10中任一项所述的系统,其特征在于,
13.如权利要求1至10中任一项所述的系统,其特征在于,
14.一种方法,其为用于控制作业机械的方法,所述作业机械具有包含第一部分的多个构成部分,其特征在于,具备:
15.如权利要求14所述的方法,其特征在于,
16.一种作业机械,其特征在于,具备:
技术总结本发明的系统是用于具有包含第一部分的多个构成部分的作业机械的系统。该系统具备存储装置、输入装置、控制器。存储装置存储多个构成部分各自的重心位置。输入装置接收用于决定第一部分的重心位置的第一参数的输入。控制器基于多个构成部分的重心位置,计算作业机械整体的重心位置。控制器在利用输入装置输入第一参数时,根据第一参数,设定第一部分的重心位置。控制器基于包含所设定的第一部分的重心位置的多个构成部分的重心位置,设定作业机械整体的重心位置。技术研发人员:木村将也,柴田刚宏,松井贵圣,平山智挥,山越洋祐,菊泽辽平受保护的技术使用者:株式会社小松制作所技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/57911.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表