一种步进式智能生态清淤方法
- 国知局
- 2024-07-09 17:39:31
本发明属于清淤,具体涉及一种步进式智能生态清淤方法。
背景技术:
1、水污染的来源主要有外源污染和内源污染,其中内源污染主要指污染物在底泥中的沉积所导致的,因此定期对河流、湖泊、水库、河道和其他水体的底泥进行疏浚清淤是污染治理的重要工作。
2、目前对海洋、大型湖泊、水库的传统清淤的方法是采用挖掘-绞吸-抽吸,这种方法效率高,但是对淤泥不进行干化处理,容易破坏生态;另外部分水域需要把水排干后再处理,其处理的成本高。
3、底泥洗脱技术主要用于城市内河或景观水体等小型水体进行处理的主法,主要是洗脱底泥表层受污染的淤泥,洗脱底泥的深度较浅,一般不超过500mm,所以具有生态破坏性小、工程量小、清出泥量少等优点,但是存在效率低、清淤不够彻底等缺陷。
4、生态清淤介于传统挖掘技术和底泥洗脱技术之间,与传统清淤相比,其工程量小、破坏性小,效率高于洗脱但是低于挖掘方式,关键是清淤与干化设备分离,可以在狭窄河道和小型水域进行作业,特别是国内多数城市河道都无法采用大型清淤船,而适用此方法。如cn110725354a公开了一种绞吸式一体化智能高效清淤船,其利用其前端绞吸装置将淤泥底泥抽吸上来,输送到滚筒式格栅机中进行泥渣分离,分离后的滤渣通过皮带输送机输进入泥饼输送船,分离后泥水混合物由进入污泥浓缩机进行浓缩(加药装置加药),处理后进入连续式旋转压滤机进行深度脱水处理,污泥泥饼进入泥饼输送船。
5、然而,现有的生态清淤主要是以人工作业为主,作业的路径规划和点位覆盖无法精确控制,存在重复作业和遗漏作业等情况;并且人工作业和测量的自动化程度和效率均低。因此通过人工智能、自动控制和信息化技术提升生态清淤的技术水平非常有必要。
技术实现思路
1、本发明的目的是提供一种步进式智能生态清淤方法,实现对作业点位精准控制和无人清淤方法。
2、本发明的具体技术方案如下:
3、一种步进式智能生态清淤方法,包括以下步骤:
4、s1、设置清淤船在待清淤的水面进行作业的作业路线和作业点位:
5、s2、将清淤船开到第一条作业路线上的第一个作业点处,并通过设置在清淤船后部的两外侧壁上的锚定装置将清淤船进行锚定;
6、s3、将清淤船上的绞吸头向船体外侧水平延伸m米后停止;
7、s4、再将绞吸头垂直下降使其底端接触水底,并将绞吸头进行固定;
8、s5、绞吸头开始进行清淤工作,水底污泥通过绞吸头经伸缩输送管而传送到安装在船体上的处理设备中进行处理,并在线检测被绞吸头抽上来的泥水混合物的浊度,其浊度随时间进度而降低,当达到设定的阈值30-100ntu时,将绞吸头提升脱离水底,且绞吸头停止工作并静置;
9、s6、重复步骤s4-s5至少2-3次,该作业点位的清淤作业完成;
10、s7、计算清淤船的前进方向与当前作业路径之间的角度差a,如果角度差a大于5度时,需要调整清淤船的前进方向;如果角度差a不大于5度时,将清淤船上的锚定装置起升而脱离水底,同时步进式将绞吸头水平收回,由于绞吸头的底端是固定在水底的,则会拉动清淤船向前移动,共计移动m米后使清淤船到达下一个作业点位;
11、s8、将锚定装置下降而对清淤船进行锚定,再重复步骤s4-s6,完成第二个作业点位的清淤工作,依次循环而完成整个清淤工作。
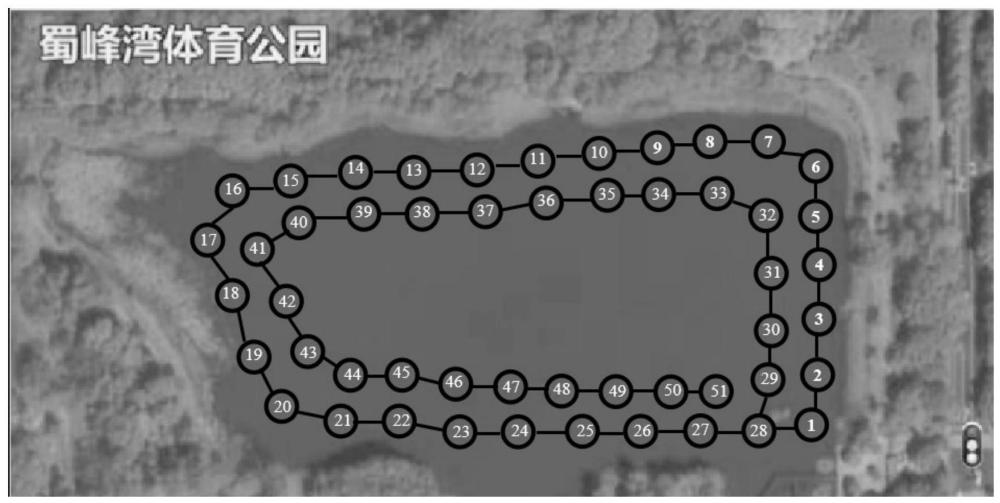
12、进一步方案,所述作业路线和作业点位的设置方法为:先围绕水面的外周等间距地设置一圈作业点位,将这一圈作业点位连接起来即为清淤船的第一条作业路线;然后再向中心处移动一段距离,再同前等间距地设置一圈作业点位,将这一圈作业点位连接起来即为清淤船的第二条作业路线;据此,从水面的外周向中心处依次设置作业点位和作业路线。
13、更进一步方案,所述同一条作业路线上相邻两个作业点位之间的距离为清淤船上绞吸头的宽度,相邻两条作业路线之间的距离为绞吸头的长度。
14、进一步方案,步骤s3和s7中的m米均为绞吸头的宽度;
15、步骤s5中绞吸头停止工作并静置10-30秒;
16、步骤s7中将绞吸头提升脱离水底200-500mm;
17、进一步方案,步骤s3中绞吸头的顶端通过升降杆与垂直步进装置连接,所述垂直步进装置通过伸缩杆与固设在清淤船上的水平步进装置连接,水平步进装置工作后,驱使垂直步进装置带动绞吸头一同向外水平延伸。
18、更进一步方案,步骤s4中绞吸头垂直下降是通过垂直步进装置驱使绞吸头垂直运动;将绞吸头进行固定是采用升降杆的底端插入水底进行固定;
19、所述升降杆的顶端与垂直步进装置连接、底端与绞吸头活动连接,所述升降杆上固设有对绞吸头进行限位的限位卡。
20、进一步方案,步骤s7中当前作业路径为当前作业点位至下一个作业点位之间的连线。
21、调整清淤船的前进方向的步骤如下:
22、s71、将锚定装置起升而脱离水底;
23、s72、控制清淤船前进并同时调整其方向,直至清淤船的前进方向与当前作业路径之间的角度误差a在5度之内;
24、s73、同时使清淤船前进至距离下一个作业点位的500mm内处。
25、进一步方案,步骤s4中绞吸头的底端是否接触水底的判断方法为:
26、检测当前t毫秒时绞吸头下降的长度dt,则上一毫秒的下降长度为dt-1,如果dt-dt-1小于n,其中n为设定的长度阈值为10-50mm,t不小于1000毫秒;则表示绞吸头已经触底而停止下降,否则绞吸头继续下降。
27、更进一步方案,检测当前t毫秒时绞吸头下降的长度dt,其是通过拉绳位移传感器来检测的,其中拉绳位移传感器的位移传感器本身安装在垂直步进装置上、钢丝绳的端部固定在绞吸头上。
28、进一步方案,所述清淤船为自主巡航无人船。
29、本发明清淤方法通过提前规划好清淤船在待清淤的水面进行作业的作业路线和作业点位,实现大圈套小圈的方式设置作业路线,并控制同一条作业路线上相邻两个作业点位之间的距离为清淤船上绞吸头的宽度,相邻两条作业路线之间的距离为绞吸头的长度。清淤船沿着作业路线行驶,并在每个作业点位上进行清淤作业从而绞吸头清淤的面积能覆盖整个水面。
30、本发明通过计算清淤船的前进方向与当前作业路径之间的角度差来严格保护清淤船到达下一个作业点位,所以本发明实现了对作业点位精准控制和无人清淤,并避免了重复作业和遗漏作业等情况的发生。
31、本发明采用步进的方式对绞吸头实现水平和垂直移动,从而使绞吸头的移动稳定可靠,且能实现。另外,绞吸头的出口通过伸缩输送管与清淤船上的处理设备进行连接,将抽吸上来的泥水混合物通过伸缩输送管传送到清淤船上,其中伸缩输送管是为了保证绞吸头能顺畅地水平或垂直移动。
32、本发明中采用的清淤船为自主巡航无人船,从而实现通过遥控器、电脑或手机等来控制其前进、转向或停止工作,大大提高了自动程度。
本文地址:https://www.jishuxx.com/zhuanli/20240617/60185.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表