一种履带式推土机用自动控制系统的制作方法
- 国知局
- 2024-07-09 17:43:41
本发明涉及履带式推土机,具体涉及一种履带式推土机用自动控制系统。
背景技术:
1、现有技术的履带式推土机多采用纯机械式液压控制系统进行控制,驾驶员需通过手动操控履带式推土机的左履带操纵杆、右履带操纵杆、和换挡杆来控制履带式推土机行驶,通过手动操控履带式推土机的铲刀操纵杆来控制履带式推土机的铲刀动作,驾驶员手动操控履带式推土机进行平地工作时,会消耗大量的体能和精力。
技术实现思路
1、本发明要解决的技术问题是提供一种履带式推土机用自动控制系统,使用该自动控制系统的履带式推土机能进行自动平地工作。
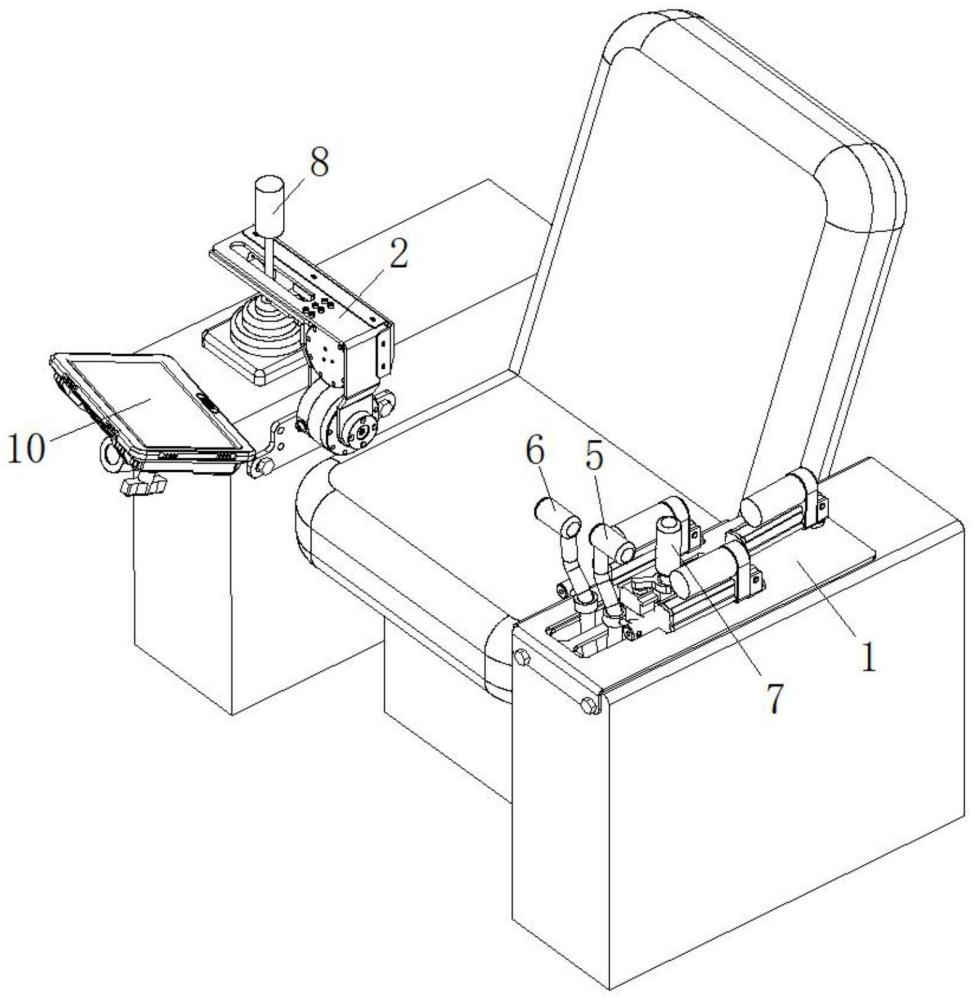
2、为解决上述技术问题,本发明提供的一种履带式推土机用自动控制系统,包括行驶控制装置、铲刀控制装置、一对gnss天线和超声波传感器,所述行驶控制装置适于操控左履带操纵杆、右履带操纵杆、和换挡杆,所述铲刀控制装置适于操控铲刀操纵杆,所述行驶控制装置和铲刀控制装置分别与控制器电性连接,一对gnss天线分别适于对称安装在铲刀的左、右侧,所述超声波传感器适于安装在铲刀的上方以检测铲刀中的土方量。
3、进一步的优选,所述控制器是plc、单片机、或微电脑,所述控制器与触摸屏电性连接,操作者可通过触摸屏输入指令,所述控制器采用g信号或固定基站两种方式进行卫星定位。
4、进一步的优选,所述行驶控制装置包括底板,所述底板适于安装在行驶控制台的顶面上,所述底板上开设有容许左履带操纵杆、右履带操纵杆、和换挡杆穿过的通孔,所述底板的上方活动连接有一对并排设置的第一电推杆,所述第一电推杆的前端设有第一套环,一对第一套环分别适于套设在左履带操纵杆和右履带操纵杆上,所述底板的上方设有旋转座,该旋转座上活动连接有位于一对第一电推杆之间的第二电推杆,所述第二电推杆的前端设有适于套设在换挡杆上的第二套环,所述底板的顶面上设有位于第二电推杆前方的舵机,所述舵机的输出端设有摆臂,该摆臂的外端开设有凹槽,第一电推杆、第二电推杆、和舵机分别与所述控制器电性连接;当换挡杆嵌合入凹槽中时,所述舵机通过摆臂驱动换挡杆摆动。
5、一对第一电推杆分别用于推拉控制左履带操纵杆和右履带操纵杆,通过推拉左履带操纵杆和右履带操纵杆来控制履带式推土机的左、右履带的运行速度,从而实现控制履带式推土机直线行驶或转向行驶;初始状态下,所述换挡杆处于前进档位上,所述第二电推杆通过推拉换挡杆以控制履带式推土机前进加减档,当换挡杆需切换至倒车档位时,所述第二电推杆先将换挡杆前推至空挡并嵌合入摆臂的凹槽中,然后所述舵机通过摆臂驱动换挡杆摆动至倒车挡位,所述第二电推杆通过推拉换挡杆以控制履带式推土机倒车加减档。
6、进一步的优选,所述第一电推杆、第二电推杆、和舵机上分别设有编码器,该编码器与所述控制器电性连接;所述第一电推杆、第二电推杆、和舵机分别通过编码器将旋转角度信号或移动距离信号传输至控制器,以使控制器能够精确的控制第一电推杆、第二电推杆、和舵机动作。
7、进一步的优选,所述铲刀控制装置包括侧板,所述侧板适于安装在铲刀控制台的内侧面上,所述侧板的外侧设有驱动电机,所述驱动电机的输出端设有摆动臂,所述摆动臂远离驱动电机的一端设有罩壳,所述罩壳内设有牵引电机,所述牵引电机的输出轴穿过罩壳的侧壁,所述罩壳的侧壁上穿设有位于牵引电机右侧的转轴,所述牵引电机的输出轴的外端与转轴之间通过挠性件传动配合,所述罩壳内水平设置有一端延伸出罩壳外的滑动板,所述滑动板的外端与挠性件的一侧边连接,所述滑动板的内端开设有容许铲刀操纵杆穿过的通孔,所述罩壳的顶部开设有与铲刀操纵杆滑动配合的长条孔。
8、工作时,驱动电机通过驱动罩壳摆动,带动铲刀操纵杆前后摆动,所述牵引电机通过驱动滑动板滑动,带动铲刀操纵杆沿长条孔的长度方向左右摆动,实现对履带式推土机的铲刀的升降和倾斜的姿态控制。
9、进一步的优选,所述驱动电机和牵引电机上分别设有编码器,该编码器与所述控制器电性连接;所述驱动电机和牵引电机分别通过编码器将旋转角度信号传输至控制器,以使控制器能够精确的控制驱动电机和牵引电机动作。
10、本发明的有益效果:工作时,所述超声波传感器将铲刀中的土方量信号传递至控制器,当铲刀中的土方量超标时,控制器自动控制履带式推土机进行临时抬铲动作,避免履带式推土机因为推力不够导致原地打滑的情况;一对gnss天线将卫星定位信号传递至控制器,控制器自动计算出铲刀的高度和倾角,由于履带式推土机的铲刀与车身在地面投影上的位置相对固定,控制器还能推算出履带式推土机的当前位置和航向;控制器自动控制行驶控制装置和铲刀控制装置动作,所述行驶控制装置操控左履带操纵杆、右履带操纵杆、和换挡杆以控制履带式推土机行驶,所述铲刀控制装置操控铲刀操纵杆以控制履带式推土机的铲刀动作,因此,使用本发明自动控制系统的履带式推土机能进行自动平地工作。
技术特征:1.一种履带式推土机用自动控制系统,其特征在于:包括行驶控制装置(1)、铲刀控制装置(2)、一对gnss天线(3)和超声波传感器(4),所述行驶控制装置(1)适于操控左履带操纵杆(5)、右履带操纵杆(6)、和换挡杆(7),所述铲刀控制装置(2)适于操控铲刀操纵杆(8),所述行驶控制装置(1)和铲刀控制装置(2)分别与控制器(10)电性连接,一对gnss天线(3)分别适于对称安装在铲刀(9)的左、右侧,所述超声波传感器(4)适于安装在铲刀(9)的上方以检测铲刀中的土方量。
2.根据权利要求1所述的自动控制系统,其特征在于:所述行驶控制装置(1)包括底板(11),所述底板(11)上开设有容许左履带操纵杆(5)、右履带操纵杆(6)、和换挡杆(7)穿过的通孔,所述底板(11)的上方活动连接有一对并排设置的第一电推杆(12),所述第一电推杆(12)的前端设有第一套环(13),一对第一套环(13)分别适于套设在左履带操纵杆(5)和右履带操纵杆(6)上,所述底板(11)的上方设有旋转座(14),该旋转座(14)上活动连接有位于一对第一电推杆(12)之间的第二电推杆(15),所述第二电推杆(15)的前端设有适于套设在换挡杆(7)上的第二套环(16),所述底板(11)的顶面上设有位于第二电推杆(15)前方的舵机(17),所述舵机(17)的输出端设有摆臂(18),该摆臂(18)的外端开设有凹槽(19),第一电推杆(12)、第二电推杆(15)、和舵机(17)分别与所述控制器(10)电性连接;当换挡杆(7)嵌合入凹槽(19)中时,所述舵机(17)通过摆臂(18)驱动换挡杆(7)摆动。
3.根据权利要求2所述的自动控制系统,其特征在于:所述第一电推杆(12)、第二电推杆(15)、和舵机(17)上分别设有编码器,该编码器与所述控制器(10)电性连接。
4.根据权利要求1所述的自动控制系统,其特征在于:所述铲刀控制装置(2)包括侧板(20),所述侧板(20)的外侧设有驱动电机(21),所述驱动电机(21)的输出端设有摆动臂(22),所述摆动臂(22)远离驱动电机(21)的一端设有罩壳(23),所述罩壳(23)内设有牵引电机(24),所述牵引电机(24)的输出轴穿过罩壳(23)的侧壁,所述罩壳(23)的侧壁上穿设有位于牵引电机(24)右侧的转轴(25),所述牵引电机(24)的输出轴的外端与转轴(25)之间通过挠性件(26)传动配合,所述罩壳(23)内水平设置有一端延伸出罩壳(23)外的滑动板(27),所述滑动板(27)的外端与挠性件(26)的一侧边连接,所述滑动板(27)的内端开设有容许铲刀操纵杆(8)穿过的通孔,所述罩壳(23)的顶部开设有与铲刀操纵杆(8)滑动配合的长条孔(28)。
5.根据权利要求4所述的自动控制系统,其特征在于:所述驱动电机(21)和牵引电机(24)上分别设有编码器,该编码器与所述控制器(10)电性连接。
技术总结本发明涉及一种履带式推土机用自动控制系统,包括行驶控制装置、铲刀控制装置、一对GNSS天线和超声波传感器,所述行驶控制装置适于操控左履带操纵杆、右履带操纵杆、和换挡杆,所述铲刀控制装置适于操控铲刀操纵杆,所述行驶控制装置和铲刀控制装置分别与控制器电性连接,一对GNSS天线分别适于对称安装在铲刀的左、右侧,所述超声波传感器适于安装在铲刀的上方以检测铲刀中的土方量;使用本发明自动控制系统的履带式推土机能进行自动平地工作。技术研发人员:史运泽,沈陈星,徐奕飞受保护的技术使用者:江苏莱赛导航科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/60390.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。