巡检机器人导航系统及方法与流程
- 国知局
- 2024-06-21 10:41:23
本申请涉及智能导航领域,且更为具体地,涉及一种巡检机器人导航系统及方法。
背景技术:
1、巡检机器人是一种能够自主巡视和监测设备状态的智能机器人,其通常被用于工业、仓储、医疗等领域,用于执行巡检任务,例如巡视设备运行状态、检查设备故障等。
2、在巡检机器人的巡检任务中,导航系统是确保巡检机器人完成任务的关键部分,它负责将机器人从一个位置导航到另一个位置,以完成巡检任务。然而,传统的巡检机器人导航系统通常基于预先设定的路径或地标进行导航,这种刚性规划方式对于环境变化敏感。如果环境发生变化,例如有新的障碍物出现或者路径被堵塞,机器人可能无法适应新的情况并成功导航。并且,传统导航系统通常使用传感器(如激光雷达、摄像头等)来感知环境,并根据感知结果进行导航决策。然而,传感器的感知范围和精度是有限的,可能无法完全获取到环境的真实状态,从而影响导航的准确性和安全性。因此,某些情况下,需要用户操作来进行巡检机器人的导航控制。
3、然而,在传统的用户控制机器人的巡检系统中,通常是通过按钮、遥控器或者触摸屏等方式进行操作,这种交互方式相对繁琐,不够直观和自然。用户可能需要接受培训才能熟练使用导航系统,限制了机器人的易用性和普及度。此外,一些通过语音交互的方式中也存在诸多问题,例如,传统导航系统中的语义理解通常基于简单的关键词匹配或规则匹配,无法准确理解复杂的语义含义。这导致机器人对于用户的指令理解有限,可能产生误解或错误的导航行为。
4、因此,期望一种优化的巡检机器人导航系统。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种巡检机器人导航系统及方法,其通过实时采集用户输入的巡检机器人导航语音信号,并在后端引入信号处理和分析算法来进行所述巡检机器人导航语音信号的信号分析,以此来进行机器人导航指令的类型判断,从而控制巡检机器人执行相应的动作,以提高巡检机器人导航系统的性能和智能化程度,从而提升了用户的体验感和实际应用性。
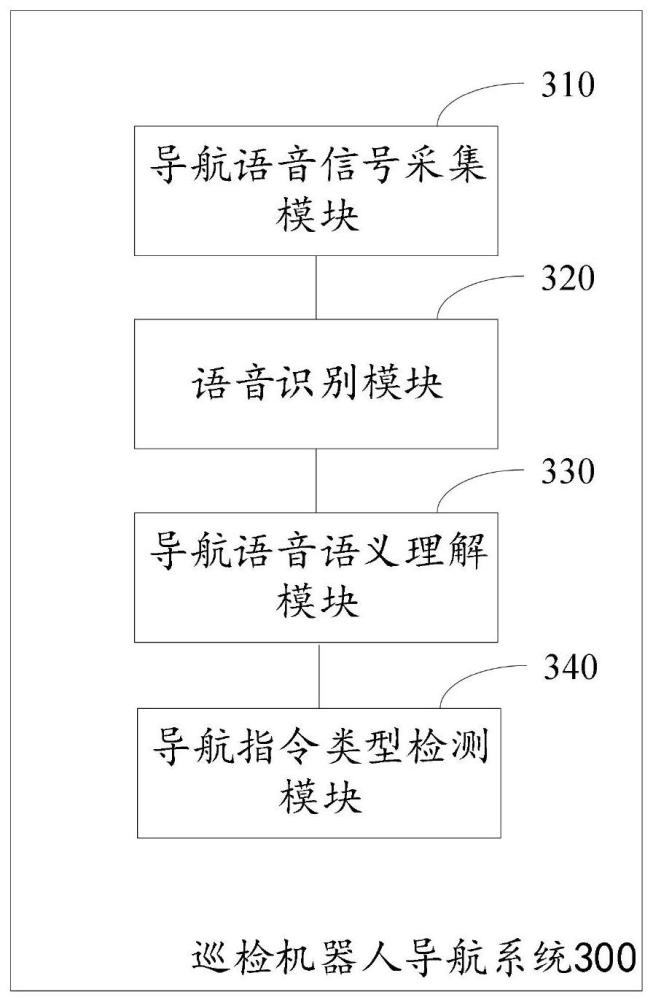
2、根据本申请的一个方面,提供了一种巡检机器人导航系统,其包括:
3、导航语音信号采集模块,用于获取由用户输入的巡检机器人导航语音信号;
4、语音识别模块,用于对所述巡检机器人导航语音信号进行语音识别以得到巡检机器人导航语音文本;
5、导航语音语义理解模块,用于对所述巡检机器人导航语音文本进行语义理解以得到巡检机器人导航语音语义编码特征;
6、导航指令类型检测模块,用于基于所述巡检机器人导航语音语义编码特征,确定导航指令类型标签。
7、根据本申请的另一个方面,提供了一种巡检机器人导航方法,其包括:
8、获取由用户输入的巡检机器人导航语音信号;
9、对所述巡检机器人导航语音信号进行语音识别以得到巡检机器人导航语音文本;
10、对所述巡检机器人导航语音文本进行语义理解以得到巡检机器人导航语音语义编码特征;
11、基于所述巡检机器人导航语音语义编码特征,确定导航指令类型标签。
12、与现有技术相比,本申请提供的一种巡检机器人导航系统及方法,其通过实时采集用户输入的巡检机器人导航语音信号,并在后端引入信号处理和分析算法来进行所述巡检机器人导航语音信号的信号分析,以此来进行机器人导航指令的类型判断,从而控制巡检机器人执行相应的动作,以提高巡检机器人导航系统的性能和智能化程度,从而提升了用户的体验感和实际应用性。
技术特征:1.一种巡检机器人导航系统,其特征在于,包括:
2.根据权利要求1所述的巡检机器人导航系统,其特征在于,所述导航语音语义理解模块,包括:
3.根据权利要求2所述的巡检机器人导航系统,其特征在于,所述语音文本语义编码单元,用于:对所述补偿巡检机器人导航语音文本进行分词处理后通过包含词嵌入层的上下文编码器以得到所述巡检机器人导航语音语义编码特征向量。
4.根据权利要求3所述的巡检机器人导航系统,其特征在于,所述语音文本语义编码单元,包括:
5.根据权利要求4所述的巡检机器人导航系统,其特征在于,所述导航指令类型检测模块,包括:
6.根据权利要求5所述的巡检机器人导航系统,其特征在于,所述特征分布优化单元,用于:以如下优化公式对所述巡检机器人导航语音语义编码特征向量进行希尔伯特正交空间域表示解耦以得到所述优化巡检机器人导航语音语义编码特征向量;
7.根据权利要求6所述的巡检机器人导航系统,其特征在于,所述导航指令判断单元,包括:
8.一种巡检机器人导航方法,其特征在于,包括:
技术总结本申请公开了一种巡检机器人导航系统及方法,其通过实时采集用户输入的巡检机器人导航语音信号,并在后端引入信号处理和分析算法来进行所述巡检机器人导航语音信号的信号分析,以此来进行机器人导航指令的类型判断,从而控制巡检机器人执行相应的动作,以提高巡检机器人导航系统的性能和智能化程度,从而提升了用户的体验感和实际应用性。技术研发人员:程军强,曹德政,杨参,史伟,朱连杰,岑永超,徐晓莉,李国峰受保护的技术使用者:欧亚高科数字技术有限公司技术研发日:技术公布日:2024/1/25本文地址:https://www.jishuxx.com/zhuanli/20240618/21224.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。