一种用于路噪主动控制的降延迟归一化混合ANC方法
- 国知局
- 2024-06-21 11:29:07
本发明属于汽车道路噪声主动控制,尤其涉及一种用于路噪主动控制的降延迟归一化混合anc方法。
背景技术:
1、在当今汽车消费市场中,汽车乘坐的舒适性是消费者选择购买汽车的一个重要的条件。汽车噪声是影响消费者乘坐体验感的一个重要因素,因此能够提供一个安静的车内环境是提高汽车企业竞争力的一个重要手段。伴随着汽车电气智能化时代的来临,特别是新能源汽车没有发动机,道路噪声更是车内噪声产生的主要来源,因此对道路噪声的控制也是近些年来车内噪声控制方面越来越重要的课题。为提供更安静的车内环境,相较于传统的被动控制方法,如吸声、消声、隔声等手段,主动控制对中低频噪声有更好的抑制效果。由于道路噪声主要分布在0-500hz之间,所以主动控制技术的应用能够更好的得到噪声抑制的效果。然而现有的道路主动控制技术存在实际应用上的控制延迟,并且对于不同的道路状况和驾驶条件下存在收敛速度和稳态性能的不平衡的问题。
技术实现思路
1、为解决上述技术问题,本发明提出了一种用于路噪主动控制的降延迟归一化混合anc方法,通过仿真分析发现在不同的道路和不同的驾驶情况下能实现更好的道路噪声抑制效果。
2、为实现上述目的,本发明提供了一种用于路噪主动控制的降延迟归一化混合anc方法,包括:
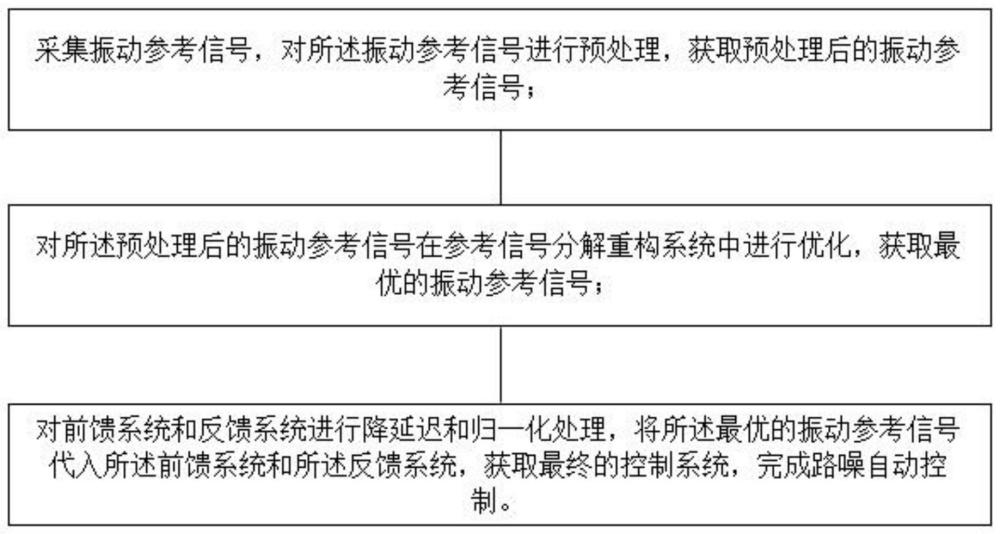
3、采集振动参考信号,对所述振动参考信号进行预处理,获取预处理后的振动参考信号;
4、对所述预处理后的振动参考信号在参考信号分解重构系统中进行优化,获取最优的振动参考信号;
5、对前馈系统和反馈系统进行降延迟和归一化处理,将所述最优的振动参考信号代入所述前馈系统和所述反馈系统,获取最终的控制系统,完成路噪自动控制。
6、可选的,采集振动参考信号的方法包括:
7、通过若干组振动传感器测量车辆副车架与车身位置、悬架与车身连接位置,获取若干组所述振动参考信号。
8、可选的,对所述振动参考信号进行预处理,获取预处理后的振动参考信号包括:通过枚举法对所述振动参考信号进行自动控制,筛选不同峰值频段下降噪效果最优的振动参考信号,获取预处理后的振动参考信号。
9、可选的,对所述预处理后的振动参考信号在参考信号分解重构系统中进行优化,获取最优的振动参考信号包括:
10、对所述预处理后的振动参考信号在各峰值频段下进行滤波分类和重构合并,进一步进行自适应前馈控制处理和自适应反馈控制处理获取最优的振动参考信号。
11、可选的,自适应前馈控制处理过程包括:
12、通过麦克风采集噪声信号获得期望信号;
13、所述预处理后的振动参考信号通过前馈控制滤波器获得前馈输出信号;
14、所述预处理后的振动参考信号采用次级路径估计模型生成前馈滤波参考信号;
15、通过前馈滤波参考信号和误差信号对前馈控制滤波器进行权系数更新。
16、可选的,自适应反馈控制处理过程包括:
17、所述期望信号和前馈输出信号、反馈输出信号生成误差信号;
18、所述误差信号和前馈输出信号生成反馈参考信号;
19、所述反馈参考信号通过反馈控制滤波器获得反馈输出信号;
20、所述反馈参考信号通过次级路径估计模型滤波获得反馈滤波参考信号;
21、反馈系统中的反馈控制滤波器由所述反馈滤波参考信号和所述误差信号参与反馈控制滤波器的权系数更新。
22、可选的,对前馈系统和反馈系统进行降延迟和归一化处理,将所述最优的振动参考信号代入所述前馈系统和所述反馈系统,获取最终的控制系统包括:对所述最优的振动参考信号在所述前馈系统和所述反馈系统加入延迟优化和实时变量参与权系数更新,获取最终的控制系统。
23、可选的,对所述最优的振动参考信号在所述前馈系统和所述反馈系统加入延迟优化和实时变量参与权系数的更新计算如下:
24、
25、
26、其中,w为控制器权系数,w(n)为第n时刻控制器权系数,x为参考信号,e为误差信号,αf为一个小的正数,px(n-1)为上一段参考信号的能量值,δ为0~1的系数值,g为变量,g(n)为第n时刻归一化算法调整变量,e(n)为第n时刻误差信号,x(n)为第n时刻参考信号;ge(n)是第n时刻ge值,gd(n)是第n时刻gd值,γ的值取0.9999,是第n时刻期望信号的估计。
27、本发明技术效果:本发明公开了一种用于路噪主动控制的降延迟归一化混合anc方法,本发明选取在峰值频段最优的参考信号进行滤波并重构合并形成新的参考信号;在实际应用时通过滑动矩形窗的方法改变归一化算法计算的方式保证参考信号的滤波和归一化计算的并行处理;并在归一化算法中引入实时变量g来调整收敛效果与稳态误差的平衡,解决传统路噪主动控制计算延迟和不稳定的问题,在路噪峰值频段的降噪中取得良好的降噪效果。
技术特征:1.一种用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,包括以下步骤:
2.如权利要求1所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,采集振动参考信号的方法包括:
3.如权利要求1所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,对所述振动参考信号进行预处理,获取预处理后的振动参考信号包括:通过枚举法对所述振动参考信号进行自动控制,筛选不同峰值频段下降噪效果最优的振动参考信号,获取预处理后的振动参考信号。
4.如权利要求1所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,对所述预处理后的振动参考信号在参考信号分解重构系统中进行优化,获取最优的振动参考信号包括:
5.如权利要求4所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,自适应前馈控制处理过程包括:
6.如权利要求5所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,自适应反馈控制处理过程包括:
7.如权利要求1所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,对前馈系统和反馈系统进行降延迟和归一化处理,将所述最优的振动参考信号代入所述前馈系统和所述反馈系统,获取最终的控制系统包括:对所述最优的振动参考信号在所述前馈系统和所述反馈系统加入延迟优化和实时变量参与权系数更新,获取最终的控制系统。
8.如权利要求7所述的用于路噪主动控制的降延迟归一化混合anc方法,其特征在于,对所述最优的振动参考信号在所述前馈系统和所述反馈系统加入延迟优化和实时变量参与权系数的更新计算如下:
技术总结本发明公开了一种用于路噪主动控制的降延迟归一化混合ANC方法,包括以下步骤:采集振动参考信号,对所述振动参考信号进行预处理,获取预处理后的振动参考信号;对所述预处理后的振动参考信号在参考信号分解重构系统中进行优化,获取最优的振动参考信号;对前馈系统和反馈系统进行降延迟和归一化处理,将所述最优的振动参考信号代入所述前馈系统和所述反馈系统,获取最终的控制系统,完成路噪自动控制。本发明通过仿真分析发现在不同的道路和不同的驾驶情况下能实现更好的道路噪声抑制效果。技术研发人员:邓家亮,刘宁宁,郭辉,袁涛,孙裴,黄双,杨超受保护的技术使用者:上海工程技术大学技术研发日:技术公布日:2024/2/19本文地址:https://www.jishuxx.com/zhuanli/20240618/21769.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。