一种基于提拉法涂胶的装置及其使用方法
- 国知局
- 2024-06-21 12:31:50
本发明涉及提拉法涂胶,尤其涉及一种基于提拉法涂胶的装置及其使用方法。
背景技术:
1、滚动压印具有很多平面压印所不具备的优点,滚动压印模具的制作成本比较低但是生产率却不低,有着较好的应用前景。滚动压印模具制造集成电路技术在原理上是利用滚动压印模具的连续滚动,从而不间断地将模具上的图案复制到我们所需要的地方,一般这种图案会被复刻到聚合物薄膜上,对一些成型的商业产品大批量生产非常适合。我们使用这种技术可以更加低成本、髙效率地制作出更多复杂结构的一些微小型器件,例如说可以制作各种大面积微流控器件、各种大面积平板显示器件和阵列式传感器等。
2、在制作压印模具的工艺流程中其中比较重要的一步就是采用提拉法涂胶,而现有的提拉法涂胶方式存在着涂胶效率不高、涂胶不均匀等问题。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于提拉法涂胶的装置及其使用方法,以解决现有的提拉法涂胶方式存在着涂胶效率不高和涂胶不均匀的问题。
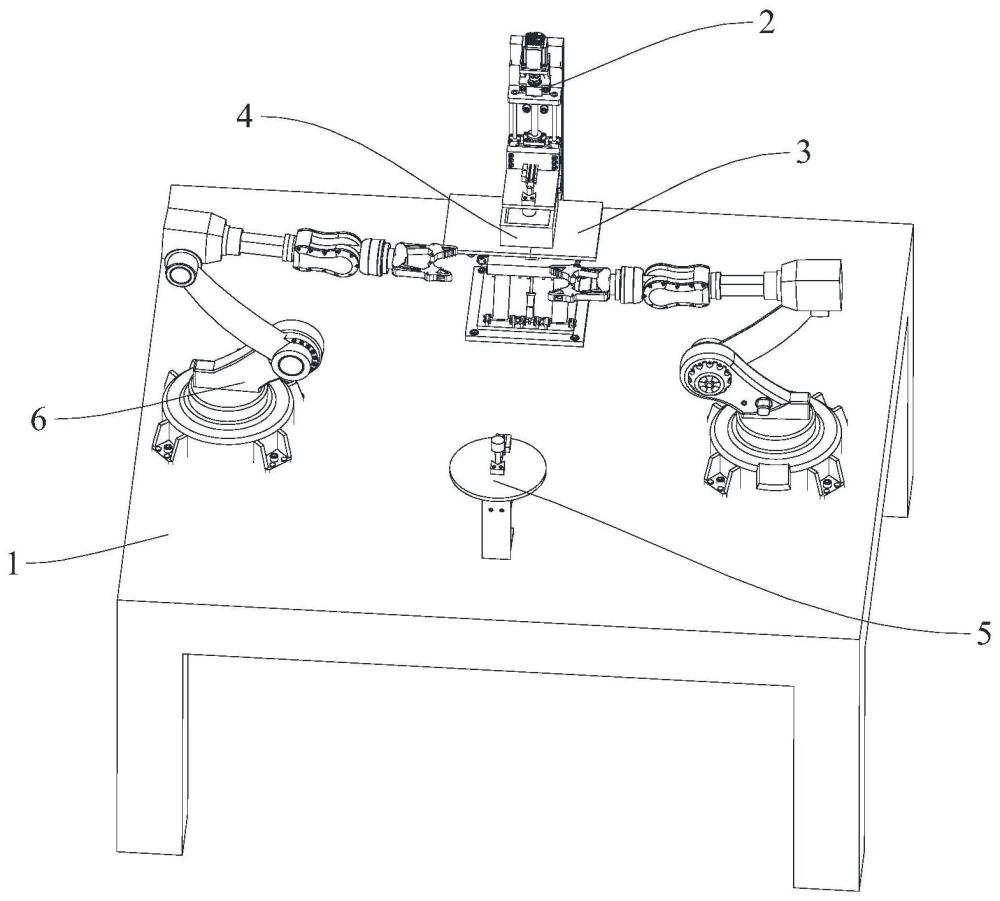
2、基于上述目的,本发明提供了一种基于提拉法涂胶的装置,包括实验桌,其顶部设有提拉机构、调平机构、光刻胶容器、辅助曝光机构和工业机器人,所述提拉机构的工作端上设有滚动压印模具,所述提拉机构用于对滚动压印模具进行提拉法涂胶,所述提拉机构的一侧设有调平机构,所述调平机构的顶部固设有光刻胶容器,所述光刻胶容器位于所述滚动压印模具的底部,所述调平机构用于对存放有光刻胶的光刻胶容器进行调平,使涂胶均匀,所述辅助曝光机设置在所述调平机构远离所述提拉机构的一侧,所述辅助曝光机构用于对涂胶完成后的滚动压印模具进行步进式旋转曝光,至少一个工业机器人设置在所述调平机构的旁侧,所述工业机器人固设在所述实验桌上,且所述工业机器人用于夹取滚动压印模具放置到提拉机构和辅助曝光机的工作端上。
3、优选的,所述提拉机构包括:
4、安装台,固设在所述实验桌上,所述安装台顶部的一处向上延伸设有安装板;
5、第一底板,固设在所述安装板的一侧;
6、升降组件,固设在所述第一底板上;
7、模具放置板,固设在所述升降组件的活动部上;
8、第一夹持组件,设置在所述模具放置板上。
9、优选的,所述升降组件包括:
10、支撑侧支座,固设在所述第一底板上;
11、前板,设置在所述支撑侧支座远离所述安装台的一侧,所述前板与所述第一底板固定连接;
12、固定侧支座,固设在所述前板远离所述支撑侧支座的一侧;
13、第一电机安装架,设置在所述固定侧支座远离所述前板的一处,所述第一电机安装架与所述第一底板固定连接;
14、伺服电机,固设在所述第一电机安装架上;
15、滚珠丝杠,其一端与所述支撑侧支座转动连接,另一端穿过所述前板和固定侧支座与所述伺服电机的输出轴固定连接;
16、滑块,套设在所述滚珠丝杠上,所述滑块与所述滚珠丝杠螺纹连接,所述滑块上穿设有至少一个光杆,所述光杆的两端分别与所述支撑侧支座和所述前板固定连接,且所述滑块与所述模具放置板固定连接。
17、优选的,所述第一夹持组件包括:
18、第一气缸安装架,固设在所述模具放置板上;
19、第一顶升气缸,固设在所述第一气缸安装架的一侧,所述第一顶升气缸的伸缩杆上固设有第一定位夹紧块,且所述第一定位夹紧块位于所述第一顶升气缸远离所述第一底板的一侧;
20、第一v型块,固设在所述模具放置板上,所述第一v型块位于所述第一定位夹紧块远离所述第一顶升气缸的一处。
21、优选的,所述调平机构包括:
22、第二底板,固设在所述实验桌的顶部;
23、调平连接板,设置在所述第二底板的上方;
24、顶板,设置在所述调平连接板的顶部,所述顶部与所述调平连接板之间通过轴承座铰接;
25、第一电动推杆,其两端分别与所述顶板的底部和所述调平连接板转动连接;
26、至少两个连接臂,设置在所述顶板与第二底板之间,每个所述连接臂的一端均与所述顶板的中部铰接,且另一端呈倾斜状态分别铰设在所述第二底板的边缘处;
27、至少两个第二电动推杆,分别与一个所述连接臂的连接状态相同,每个所述第二电动推杆的一端均与所述顶板的中部铰接,且另一端分别铰设在所述第二底板的边缘处;
28、其中,所述第一电动推杆带动顶板转动的方向与第二电动推杆带动调平连接板转动的方向不同。
29、优选的,所述辅助曝光机构包括:
30、第二电机安装架,固设在所述实验桌上;
31、连接块,固设在所述第二电机安装架的顶部;
32、步进电机,固设在所述连接块的底部,所述步进电机的输出轴穿设在所述连接块上;
33、转盘,设置在所述连接块的顶部,所述转盘的中心处与所述步进电机的输出轴固定连接;
34、第二夹持组件,固设在所述转盘的顶部。
35、优选的,所述第二夹持组件包括:
36、第二气缸安装架,固设在所述转盘上;
37、第二顶升气缸,固设在所述第二气缸安装架的一侧,所述第二顶升气缸的伸缩杆上固设有第二定位夹紧块;
38、第二v型块,固设在所述转盘上,所述第二v型块位于所述第二定位夹紧块远离所述第二顶升气缸的一处。
39、一种基于提拉法涂胶的装置的使用方法,包括如下步骤:
40、步骤一:右侧工业机器人从外界夹取未涂胶的滚动压印模具从模具放置板下方放置到第一v型块和第一定位夹紧块之间,第一顶升气缸前进推动第一定位夹紧块夹紧滚动压印模具;
41、步骤二:提拉机构的伺服电机开始工作,使滚珠丝杠运动,带动滑块下移,通过滑块带动模具放置板下移,涂胶完成后,回升到下降前位置;
42、步骤三:左侧工业机器人夹取涂胶完成后的滚动压印模具,第一顶升气缸回退带动第一定位夹紧块放开涂胶完成后滚动压印模具,左侧工业机器人将涂胶完成后的滚动压印模具放置到辅助曝光机构的转盘上,辅助曝光机构上的第二顶升气缸前进推动第二定位夹紧块夹紧滚动压印模具,左侧工业机器人回退到初始位置等待,同时右侧工业机器人夹取新的滚动压印模具放置到提拉机构的模具放置板上;
43、步骤四:辅助曝光机构上的第二顶升气缸推动第二定位夹紧块夹紧涂胶完成后的滚动压印模具,光步进电机开始工作带动转盘旋转,对滚动压印模具进行步进式旋转曝光;
44、步骤五:曝光完成后,左侧工业机器人将曝光后的滚动压印模具夹取放置到下一步的工作操作台上进行后续其他操作,并夹取新涂胶完成的滚动压印模具放置到辅助曝光机构的转盘上进行曝光操作。
45、本发明的有益效果:本发明可以更好的实现提拉法涂胶,同时自动化程度高,节约了人力成本,具有强大的机构之间的联合工作关系,工作效率高,具有良好适应性,本发明是滚动压印模具制作工艺流程的一个环节之一,可以较好的配合其他工艺步骤的操作台的放置位置。
本文地址:https://www.jishuxx.com/zhuanli/20240618/27649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表