一种回转体外圆面半自动热转印裹杯装置的制作方法
- 国知局
- 2024-06-21 12:47:44
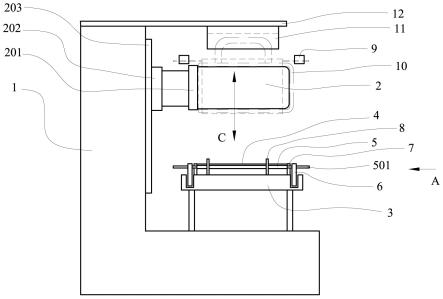
1.本实用新型涉及一种回转体外圆面半自动热转印裹杯装置,是一种机械装置,是一种用于热转印之前将热转印纸和弹性紧固皮准确的包裹到回转体外圆面的装置。背景技术:2.在回转体外圆面进行热转印需要将热转印纸紧密并准确的围绕在回转体需要印制图像的位置,以往的方式通常采用手工包裹的方式,或者采用机械化自动包裹。手工包裹效率低下,一个较熟练的工人,每包裹一个杯子需要3-4分钟的时间,适应于小批量的生产。机械自动化包裹虽然效率较高,但由于需要大量模具及其相配合的机械手等昂贵的设备,大大的增加了成本,机械自动化生产只适应于大批量的生产。而在一些中批量的生产中,既需要有较高的效率,又能够控制生产成本,因此,如何解决热转印过程中包裹杯子的批量和生产成本之间的矛盾,是一个需要解决的问题。技术实现要素:3.为了克服现有技术的问题,本实用新型提出了一种回转体外圆面半自动热转印裹杯装置。所述装置是一种半自动装置,能够快速的用皮子将热转印纸包裹在杯子上,并手工装上卡子,十分适宜中批量热转印生产。4.本实用新型的目的是这样实现的:一种回转体外圆面半自动热转印裹杯装置,包括用于固定工件的安装在支架上能够上下移动的楦头,所述的楦头下方设有矩形的工作台,所述工作台的中间设有与工件外圆相配的半圆凹陷,所述工作台上从上到下依次放置热转印纸和包裹工件以及热转印纸的弹性紧固皮,所述的弹性紧固皮两端设有横杆,所述的升降工作台的两侧设有两两相对的四个摇臂,所述的摇臂一端与回转动力机构连接,另一端设有能够扣住所述横杆的抓钩,所述的工作台的四边设有能够调节位置的弹性紧固皮和热转印纸定位块,所述的装置还包括在弹性紧固皮抱箍住工件和热转印纸时将两根横杆固定的u形卡扣。5.进一步的,所述的支架为能够放在工作台上的l形架。6.进一步的,所述的楦头上方设有杯把定位块。7.进一步的,所述的楦头设有工件轴向定位的台阶。8.进一步的,所述的楦头与能够上下移动滑块连接,所述的滑块安装在导轨上,所述的滑块与楦头推拉件连接。9.进一步的,所述的楦头推拉件是电动推杆、气动缸、液压缸中的一种。10.进一步的,所述的工作台设有升降机构。11.进一步的,所述的工作台的升降机构导轨和工作台推拉件。12.进一步的,所述的两两相对的四个摇臂设有三个工位:两对摇臂与水平面之间的夹角为25~35度的弹性紧固皮安装工位,两对摇臂与水平面之间的夹角为0~20度的拉伸弹性紧固皮的张紧工位,两对摇臂与水平面之间的夹角相差80~120度的弹性紧固皮合拢工位。13.进一步的,所述工作台两侧设有控制楦头上升并打开摇臂控制按钮、摇臂张紧弹性紧固皮控制按钮、楦头下降并使摇臂合拢控制按钮。14.本实用新型的优点和有益效果是:本实用新型通过四个能够张紧弹性紧固皮并能够合抱工件的摇臂,借助弹性紧固皮快速的将热转印纸包裹在工件周围,并利用卡扣维持包裹的状态,以此实现半自动包裹热转印纸的过程。既不需要复杂而昂贵的机械手,工人的操作也十分简单,适应中批量生产,在降低成本的同时提高了工作效率。附图说明15.下面结合附图和实施例对本实用新型作进一步说明。16.图1是本实用新型实施例一所述装置的结构示意图,是图2中b向视图;17.图2是本实用新型实施例一所述装置的结构示意图,是图1中a向视图;18.图3是本实用新型实施例一所述装置的结构示意图,是图2中c向视图(c箭头向下的视图);19.图4是本实用新型实施例九所述摇臂的半张开工位;20.图5是本实用新型实施例九所述摇臂的张开工位;21.图6是本实用新型实施例九所述摇臂的合拢工位。具体实施方式22.实施例一:23.本实施例是一种回转体外圆面半自动热转印裹杯装置,如图1、2、3所示。本实施例包括用于固定工件的安装在支架1上能够上下移动的楦头2,所述的楦头下方设有矩形的工作台3,所述工作台的中间设有与工件外圆相配的半圆凹陷301,所述工作台上从上到下依次放置热转印纸4和包裹工件以及热转印纸的弹性紧固皮5,所述的弹性紧固皮两端设有横杆501,所述的升降工作台的两侧设有两两相对的四个摇臂6,所述的摇臂一端与回转动力机构连接,另一端设有能够扣住所述横杆的抓钩601,所述的工作台的四边设有能够调节位置的弹性紧固皮和热转印纸定位块7、8,所述的装置还包括在弹性紧固皮箍住工件和热转印纸时将两根横杆固定的u形卡扣9。图1是本实施例所述装置的主视图,图2是侧视图,图3则是拆去了楦头的工作台俯视图,图3中的热转印纸用虚线表示。24.热转印的核心件是热转印纸,纸上打印有各种彩色图案。所述的弹性紧固皮是将热转印纸包裹在工件外表面的主要工具。弹性紧固皮一般采用皮革,或塑胶等材料,两侧分别设置一根横杆,利用横杆向外拉使弹性紧固皮张紧。张紧的作用是能够将热转印纸仅仅的包裹在工件的外围。25.所述的摇臂通过旋转减速机构由电机带动而形成摆动,如图2中箭头d的方向摆动。四个摇臂两两相对,摆动时形成完全张开、半张开、合抱的三种态势。摇臂端部的抓钩能够有效的扣住弹性紧固皮的横杆,并在摆动式能够维持扣住横杆的状态,形成拉紧弹性紧固皮和对工件的合抱。26.本实施例所述工件10(图1、2中用双点划线表示一个带吧的杯子),即为准备进行热转印的杯子,杯子的外形为圆柱形回转体,可以带有杯把或没有杯把。27.所述的支架可以是放置在工作台上的l形的矩形块,具有一定的重量,以防止在工作中移动,或者直接固定在工作台上。支架也可以是落地形的,放在地面上,其工作台的高度适宜工作人员座在台前操作。28.所述的楦头是一个直径与工件内壁相配合的圆柱体,能够将工件轴向和径向定位,并在包裹转印纸的操作过程中维持这个工件轴向和径向定位。楦头在上下移动机构的带动下能够上下移动,如图2中箭头c的方向上下移动。29.楦头上方可以设置杯把定位块。这个杯把定位块是专门用于针对带有杯把的杯子的周向定位,以确定热转印的图像在杯子外圆面与杯把的相对位置。30.为了精确的确定热转印图像相对与杯底或杯口的相对位置,可以在楦头上设置与热转印纸边相对应的轴向定位台阶,提高热转印图像的位置精度。31.楦头是能够上下移动的,以便压在热转印纸上并将热转印连同包括热转印纸的弹性紧固皮一起压入半圆凹陷中。因此楦头的升降需要有一套升降机构。升降机构可以采用导轨和在导轨上运行的滑块,配合推拉件即可以形成升降动作。32.所述的弹性紧固皮和热转印纸定位块是安装在工作台四周的定位系统,专门用于对弹性紧固皮和热转印纸进行定位,这一定位系统可以根据弹性紧固皮和热转印纸的大小进行位置调节,如果弹性紧固皮和热转印纸的大小完全一致,则可以只设置一组定位块。如果弹性紧固皮和热转印纸的大小不同,则需要设置两个组定位块,一组专门用于对弹性紧固皮定位,另一组专门对热转印纸定位。弹性紧固皮和热转印纸定位块可以有多种形状包括:块状、柱状等,图3中显示了弹性紧固皮的定位采用了块状定位,而热转印纸定位采用了柱状定位块。弹性紧固皮和热转印纸定位块的位置调整也可以采取多种方式,例如:螺丝紧固,插接紧固等方式。33.在实际工作中,工作台也可以设计为带有升降机构,使操作过程有更大的人手活动空间。34.为操作方便,可以在工作台两侧设有控制楦头升降、工作台升降、摇臂摇动的控制按钮。35.所述的u形卡扣的作用是将两根合抱在一起的弹性紧固皮的横杆扣住,以维持合抱的状态,使热转印纸在加热过程中维持与工件表面贴合的状态。36.本实施例所述装置的工作操作过程是:安装热转印纸,使热转印纸包裹在工件的外圆周面上,操作开始时四个摇臂平放呈30°角摆放,放置未拉伸状态的弹性紧固皮按下按钮弹性紧固皮呈拉伸平放状态,楦头抬起在最高位置。以带有杯把的工件为例,包裹热转印纸的工作过程是:首先将谈紧固皮两根横杆分别卡在摇臂顶端的抓钩内,弹性紧固皮的位置由弹性紧固皮定位块和抓钩确定,之后在弹性紧固皮使用盖上热转印纸,热转印纸的位置由弹性紧固皮定位块和热转印纸定位块确定。将工件的杯口插入楦头中,并使杯把嵌入到杯把定位块中,弹性紧固皮及转印纸定位块可根据产品的尺寸进行调节,如图1、2所示。之后压下楦头连同工件,并将工件压入工作台面上的半圆凹陷中。然后启动摇臂。两对相比相对摇动,带动横杆及其弹性紧固皮和热转印纸做包裹工件的运动,最终使两根横杆在杯把附近汇合,再由操作人员手动在两根横杆之间装上u形卡扣,之后使摇臂回摆,由于卡扣的作用,维持了弹性紧固皮和热转印纸包裹在工件周围的状态,这时将工件及其弹性紧固皮、热转印纸和卡扣一起从楦头上拔下,完成工件包裹热转印纸的操作。37.实施例二:38.本是实施例一的改进,是实施例一关于支架的细化。本实施例所述的支架为能够放在工作台上的l形架。39.本实施例的支架是一种形态较小的支架,能够放在桌面上,并呈l形。l的底面是工作台面,l的立面设置楦头的升降机构。工作面上放置弹性紧固皮和热转印纸,以及摇臂等设施。40.实施例三:41.本实施例是上述实施例的改进,是上述实施例关于带有杯把的工件定位的细化。本实施例所述的楦头上方设有杯把定位块11,如图1、2所示。42.所述的杯把定位块可以固定安装在l形支架顶端的一块延伸板12上,当楦头升起到最高位置时,杯子插入楦头中,杯把正好嵌入在杯把定位块中,当楦头下降进入工作台上半圆凹陷中时,定位块可以随杯把下降,也可以不随杯把下降。43.实施例四:44.本实施例是上述实施例的改进,是上述实施例关于楦头的细化。本实施例所述的楦头设有工件轴向定位的台阶201,如图1所示。45.这一台阶用于对杯口的定位,由于使用楦头的头部定位往往不太容易调整,而使用杯口的定位,能够在外部之间观察到,定位比较准确。46.实施例五:47.本实施例是上述实施例的改进,是上述实施例关于楦头上下移动机构的细化。本实施例所述的楦头与能够上下移动滑块202连接,所述的滑块安装在导轨203上,所述的滑块与楦头推拉件连接,如图1所示。48.本实施例所述的上下移动机构可以是滚动导轨,或者是其他直线运动副。带动滑块运动的可以是电动推杆等电动直线驱动元件,也可以是液压或气动缸等直线驱动元件。49.实施例六:50.本实施例是上述实施例的改进,是上述实施例关于楦头升降的楦头推拉件的细化。本实施例所述的楦头推拉件是电动推杆、气动缸、液压缸中的一种。51.采用电驱动,使用和维护都十分方便。可以采用电动推杆。电动推杆使用和维护都十分方便,特别是动力可以直接采用宽电压(110v-240v),而宽电压(110v-240v)在许多工作场合都能够十分容易的获得。而气动缸的动作快速,整体比较干净。液压缸的推动柔和,但需要配液压站。52.实施例七:53.本实施例是上述实施例的改进,是上述实施例关于工作台的细化。本实施例所述的工作台设有升降机构。54.为了使人员操作的手有较大的活动空间,便于安装弹性紧固皮和热转印纸,可以将工作台也设计为能够升降的。工作台的升降机构可以采用导轨和滑块的结构,其驱动力可以采用推拉件。55.实施例八:56.本实施例是上述实施例的改进,是上述实施例关于升降机构的细化。本实施例所述的工作台的升降机构包括导轨、滑块和工作台推拉件。57.所述导轨和滑块可以采用滚动导轨组件。由于工作台的重量较大,可以采用两套滚动导轨组件,分别安装在工作的前后或者左右两侧。58.实施例九:59.本实施例是上述实施例的改进,是上述实施例关于四个摇臂的细化。本实施例所述的两两相对的四个摇臂设有三个工位:两对摇臂与水平面之间的夹角α1为25~35度的弹性紧固皮安装工位,如图4所示;两对摇臂与水平面之间的夹角α2为0~20度的拉伸弹性紧固皮的张紧工位,如图5所示;两对摇臂与水平面之间的夹角α3相差80~120度的弹性紧固皮合拢工位如图6所示。60.由于弹性紧固皮抗拉丝成分较高,人工拉伸弹性紧固皮比较费力,特设有弹性紧固皮拉伸功能,以便操作人员更方便快捷的操作,为此本实施例可以设置专门的机构实现弹性紧固皮的张紧。张紧过程开始时,首先将两两相对的四个摇臂处于与水平面30度左右的角度半张开状态,这时两对抓钩之间的距离等于或稍小于弹性紧固皮的两根横杆在没有拉伸状态的距离,这时将弹性紧固皮的两根横杆可以十分轻松的扣在四个摇臂的抓钩上,弹性紧固皮处于平直的平铺而没有拉紧的状态,下一步需要将弹性紧固皮拉紧,方法是使四个摇臂向水平方向摆动,形成张大的形式,这样就会使抓钩拉动横杆,将弹性紧固皮拉紧。将热转印纸平铺在弹性紧固皮上。61.应当说明的是,本实施例中所限定的α1、α2、α3与具体设计的摇臂相对位置相关,本实施例只是对应图4~6中的摇臂旋转轴的位置而确定的角度,以表达摇臂的安装工位、张紧工位和合拢工位。62.实施例十:63.本实施例是上述实施例的改进,是上述实施例关于楦头的细化。本实施例所述工作台两侧设有控制楦头上升并打开摇臂控制按钮、摇臂张紧弹性紧固皮控制按钮、楦头下降并使摇臂合拢控制按钮13,如图3所示。64.在工作台的台面上设置按钮,操作人员能够十分方便的进行操作。65.由于操作过程的步骤为:升起楦头并打开摇臂,即:将两两相对的两个摇臂摆动到接近与水平面30度的α1角度,如图4所示,这一动作需要有个独立按钮予以控制。在摇臂的抓钩上扣上弹性紧固皮再张紧弹性紧固皮,这时需要将两两相对的摇臂张大角度,也就是使两对摇臂与水平面的角度小于30度,或接近0度,这一动作也需要有个独立按钮控制。楦头压下并使摇臂合拢,这一动作同样需要一个单独控制按钮,因此本实施例设置了三个功能不同的按钮。66.最后应说明的是,以上仅用以说明本实用新型的技术方案而非限制,尽管参照较佳布置方案对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案(比如工作台的形式、摇臂的形式和操作机构的控制方式等)进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
本文地址:https://www.jishuxx.com/zhuanli/20240618/29339.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表