一种应用于钉子作画的方法
- 国知局
- 2024-06-21 12:52:36
本发明涉及一种应用作画的方法,更具体一点说,涉及一种应用于钉子作画的方法,属于基于抖动算法钉子画创作方法领域。
背景技术:
1、抖动算法是通过混合各种颜色,使用户在屏幕上看到实际并不存在的颜色。通常的抖动是指,对灰度图像经过抖动处理后所形成的二值图像能够模拟原始图像灰度的变化,从而使人眼能感受到灰度的连续变化。
2、早期的抖动技术是用一组黑白点的阵列来代替原始图像中的一个灰度像素,而用白点的多少反映该像素的灰度等级,此方法实质上是用空间换取灰度级的。随着应用的扩展,这项技术目前已经应用到了彩色数字图像的显示。
3、目前尚不存在基于抖动算法的实物作画的方法。
技术实现思路
1、为了解决上述现有技术问题,本发明提供具有可以实现对输入图片的简单处理以及输出对应的钉子画等技术特点的一种应用于钉子作画的方法。
2、为了实现上述目的,本发明是通过以下技术方案实现的:
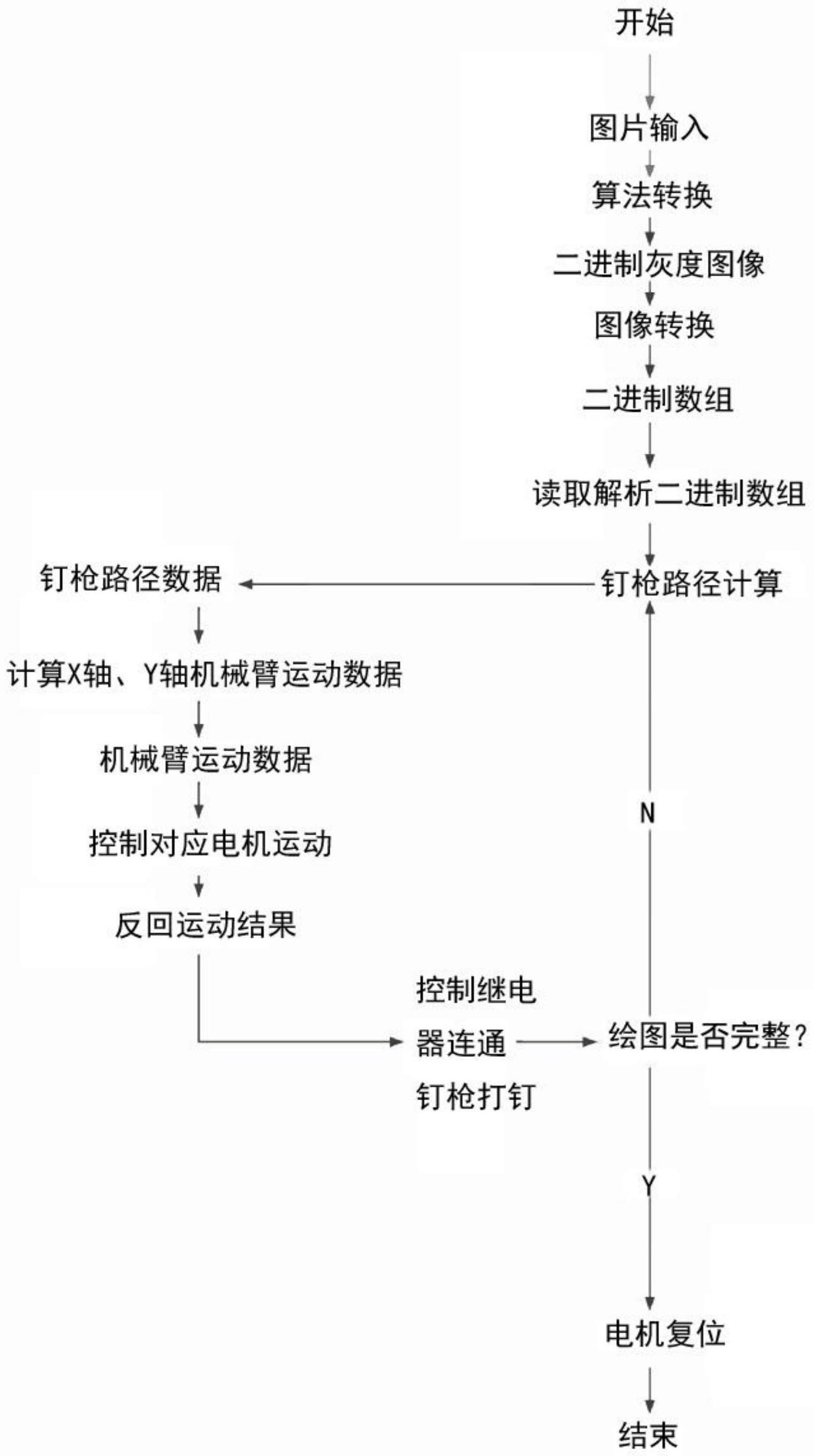
3、一种应用于钉子作画的方法,该作画方法包含以下步骤:
4、步骤1:输入图片,图片为宽高比例为1:1,颜色模式8位及以上rgb图像;
5、步骤2:利用算法转换输入的图像以变为二进制灰度图像;
6、所述利用算法转换输入的图像步骤包含:
7、1)用图像灰度化处理算法将彩色图像转化为灰度图像;
8、2)用抖动算法将转化后的灰度图像转化为二进制灰度图像;
9、步骤3:将步骤2中获得的二进制灰度图像进行数据转换,得出行数与列数相同的的二进制数组;
10、步骤4:通过单片微型计算机将得到的二进制数组进行读取、解析;通过单片微型计算机根据读取、解析后的二进制数组,进行钉枪路径计算;
11、钉枪路径计算需要预先设定画布边距n1,画布边距n1是画布边缘与第一个打钉点位的距离,机械臂步距常量n2,根据步骤3所述的二进制数组,将钉枪路径以坐标形式计算,计算结果为钉枪路径数据;其中,所述画布为打钉面板;
12、步骤5:通过单片微型计算机所连接的ramps 1.4扩展板根据钉枪路径数据计算机械臂运动数据,机械臂运动数据包括步进电机驱动参数;
13、步骤6:根据机械臂运动数据,ramps 1.4扩展板通过连接步进电机驱动器控制对应的步进电机运动;
14、步骤7:在步进电机运动到达运动结果时,信息从步进电机驱动器反向ramps1.4扩展板后,最终向单片微型计算机返回;
15、步骤8:单片微型计算机在运动结果返回后控制继电器,并通过继电器连通钉枪以实现打钉;
16、步骤9:判断钉子绘图是否完成,如果是,则进入步骤10;如果否,则返回并循环执行步骤4~8;
17、步骤10:电机复位,结束。
18、优选的,步骤2中,所述图像灰度化处理算法是取得每一个像素的r,g,b值后算出一个灰度值,用这个灰度值代替像素原始的r,g,b值;所述抖动算法是通过混合各种颜色,使用户在屏幕上看到实际并不存在的颜色。
19、优选的,步骤3中,所述二进制灰度图像中,仅存在黑白两种颜色;数据转换的方法是将二进制灰度图像的黑色像素定义为1,白色像素定义为0,根据二进制灰度图像像素个数和位置,得出行数与列数相同的的二进制数组。
20、优选的,ramps 1.4扩展板连接有两个步进电机驱动器,两个步进电机驱动器分别连接y轴步进电机和x轴步进电机,所述y轴步进电机通过y轴机械臂连接有打钉面板,所述x轴步进电机通过x轴机械臂连接有钉枪,所述钉枪与单片微型计算机间通过继电器连接,步进电机驱动器实现控制移动位置以保证出钉过程中,以打钉面板为参照物,钉枪相对打钉面板在x轴、y轴平面进行移动。
21、优选的,步骤8中,设定1为打钉点位,0为空白点位,单片微型计算机根据对应的点位来控制电流通断出钉,打钉过程直接跳过0点位,在1点位正常工作,其路径以打钉面板为参照物,钉枪相对打钉面板,在x轴、y轴平面进行移动,且按照从上至下、从左至右顺序出钉。
22、优选的,所述图像灰度化处理算法包括基于人眼感知的图像灰度化处理算法。
23、优选的,所述抖动算法为有序抖色法、floyd–steinberg抖色法、jarvis抖色法中的任意一种。
24、优选的,所述单片微型计算机为arduino mega2560开发板,所述单片微型计算机与ramps 1.4扩展板通过spi通信协议传输信息。
25、优选的,所述步进电机驱动器型号为a4988,步进电机驱动器与步进电机由控制电路连接。
26、优选的,所述钉枪与单片微型计算机由控制电路连接。
27、有益效果:对于现有技术,本申请可将抖动算法处理后的图片以钉子的形式呈现,是技术化处理后的实物生产。
技术特征:1.一种应用于钉子作画的方法,其特征在于该作画方法包含以下步骤:
2.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:步骤2中,所述图像灰度化处理算法是取得每一个像素的r,g,b值后算出一个灰度值,用这个灰度值代替像素原始的r,g,b值;所述抖动算法是通过混合各种颜色,使用户在屏幕上看到实际并不存在的颜色。
3.根据权利要求1或2所述的一种应用于钉子作画的方法,其特征在于:步骤3中,所述二进制灰度图像中,仅存在黑白两种颜色;数据转换的方法是将二进制灰度图像的黑色像素定义为1,白色像素定义为0,根据二进制灰度图像像素个数和位置,得出行数与列数相同的的二进制数组。
4.根据权利要求3所述的一种应用于钉子作画的方法,其特征在于:ramps1.4扩展板连接有两个步进电机驱动器,两个步进电机驱动器分别连接y轴步进电机和x轴步进电机,所述y轴步进电机通过y轴机械臂连接有打钉面板,所述x轴步进电机通过x轴机械臂连接有钉枪,所述钉枪与单片微型计算机间通过继电器连接,步进电机驱动器实现控制移动位置以保证出钉过程中,以打钉面板为参照物,钉枪相对打钉面板在x轴、y轴平面进行移动。
5.根据权利要求4所述的一种应用于钉子作画的方法,其特征在于:步骤8中,设定1为打钉点位,0为空白点位,单片微型计算机根据对应的点位来控制电流通断出钉,打钉过程直接跳过0点位,在1点位正常工作,其路径以打钉面板为参照物,钉枪相对打钉面板,在x轴、y轴平面进行移动,且按照从上至下、从左至右顺序出钉。
6.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:所述图像灰度化处理算法包括基于人眼感知的图像灰度化处理算法。
7.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:所述抖动算法为有序抖色法、floyd–steinberg抖色法、jarvis抖色法中的任意一种。
8.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:所述单片微型计算机为arduino mega2560开发板,所述单片微型计算机与ramps 1.4扩展板通过spi通信协议传输信息。
9.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:所述步进电机驱动器型号为a4988,步进电机驱动器与步进电机由控制电路连接。
10.根据权利要求1所述的一种应用于钉子作画的方法,其特征在于:所述钉枪与单片微型计算机由控制电路连接。
技术总结本发明公开的是一种应用于钉子作画的方法,输入图片,转换输入的图像;进行数据转换得出行数与列数相同的的二进制数组;通过单片微型计算机根据读取、解析后的二进制数组,进行钉枪路径计算;根据钉枪路径数据计算机械臂运动数据;根据机械臂运动数据,步进电机驱动器控制对应的步进电机运动;在步进电机运动到达运动结果时,信息从步进电机驱动器反向RAMPS 1.4扩展板后,最终向单片微型计算机返回;单片微型计算机在运动结果返回后控制继电器,并通过继电器连通钉枪以实现打钉;判断钉子绘图是否完成,如果是,则进入电机复位,结束;如果否,则返回并循环执行上述步骤,可将抖动算法处理后的图片以钉子的形式呈现,实现实物生产。技术研发人员:李锋,邹琳琦,周龙飞受保护的技术使用者:浙江理工大学技术研发日:技术公布日:2024/1/12本文地址:https://www.jishuxx.com/zhuanli/20240618/29759.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表