一种高空伞兵牵引训练用的模拟装置及其使用方法与流程
- 国知局
- 2024-06-21 13:38:33
本发明涉及跳伞模拟训练,具体涉及一种高空伞兵牵引训练用的模拟装置及其使用方法。
背景技术:
1、高空跳伞是一项危险的运动,对跳伞人员的要求也极其严格,跳企是一顶刺激而又充满挑战的运动,而掌握跳金空虫控制姿势的技巧则是运动中不可或缺的一部分,正确的控制姿势可以帮助跳伞者更好地稳定身体并掌握下降的速度和方向,保证跳伞安全又有趣。
2、现有的跳伞训练大多是在高处采取实战训练,采用固定式高塔,由塔顶牵引降落伞或绳索上升至一定的高度,再放开连结在受训人员身上固定绳索,受训人员练习着陆方式,但固定式高塔体积非常巨大,除造价高昂及维护不易外,因其操作复杂使得单位时间内使用的效率较低,同时其危险性也较高,当由空中跳伞训练时,会有人员受伤等事件发生,或是采取vr手段进行仿真模拟训练,但是此种训练方式不能完全模拟高处跳伞,不利于训练人员进行现实环境下的常规训练,还有使用牵引机,像放风筝一样牵引跳伞,但跳伞训练高度有限,只能进行低空跳伞训练。
技术实现思路
1、本发明的目的在于:为解决上述问题,本发明提供了一种高空伞兵牵引训练用的模拟装置及其使用方法。
2、本发明为了实现上述目的具体采用以下技术方案:
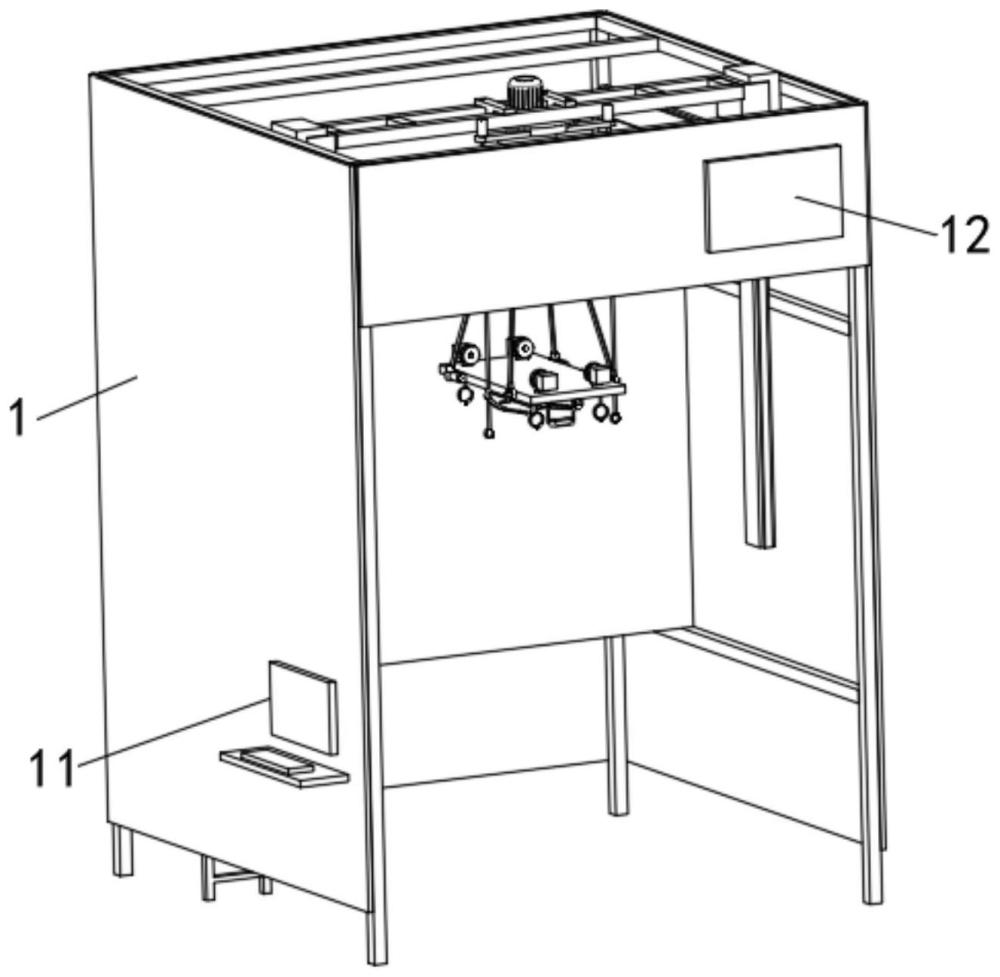
3、一种高空伞兵牵引训练用的模拟装置,包括支架,所述支架的内部设置有跳台,所述支架的内顶部设置有吊板,所述吊板能水平与竖直滑动,所述吊板的顶部安装有旋转电机,所述吊板的底部转动安装有转盘,所述转盘与旋转电机的输出端相连接,所述转盘的底部固定连接有两组前挂绳与两组后挂绳,所述吊板的外侧安装有拉力传感器,所述拉力传感器的测量端栓接方向控制绳;
4、两组前挂绳与两组后挂绳的底部同时挂接有支撑板,所述支撑板的底部设置有背带与vr眼镜,所述支撑板的顶部设置有四组四肢感应组件,所述支撑板的外侧设置有拉绳开关,所述拉绳开关能控制两组后挂绳与支撑板分离。
5、进一步地,所述四肢感应组件包括固定连接在支撑板顶部的安装板,所述安装板的外侧转动安装有卷轮,所述安装板远离卷轮的一侧固定安装有测量传感器,所述测量传感器与卷轮组成轮式测量仪,所述卷轮的内部设置有扭簧,所述卷轮的外侧卷绕有连接绳,所述支撑板的内部开设有绳孔,所述连接绳贯穿绳孔,所述连接绳的底部设置有肢体连接环。
6、进一步地,所述肢体连接环采用环形绑带,且环形绑带的开口处设置有魔术贴。
7、进一步地,所述前挂绳的底部设置有挂环,所述支撑板的两侧均设置有连接环,所述挂环穿挂在连接环上。
8、进一步地,所述支撑板的两侧均设置有连接筒,所述后挂绳的底部设置有连接头,所述连接头能插接在连接筒中,所述连接头与连接筒的内部均开设有插孔,所述支撑板的两侧均设置有锁定套,所述锁定套的内部滑动连接有插杆,所述插杆能插接在插孔中,所述锁定套的内部安装有电磁铁,所述拉绳开关能控制电磁铁通断电,所述插杆与电磁铁之间设置有顶簧。
9、进一步地,所述支架内壁的两侧均安装有横向滑轨,所述横向滑轨的外侧滑动连接有横向滑块,所述横向滑块的外侧安装有纵向滑轨,所述纵向滑轨的外侧滑动连接有纵向滑块,两组所述纵向滑块之间固定安装有横撑,所述吊板安装在横撑的底部。
10、进一步地,所述支架的外侧安装有显示器。
11、进一步地,所述跳台的外侧设置有爬梯。
12、进一步地,所述方向控制绳的底部设置有拉环。
13、一种高空伞兵牵引训练用的模拟装置使用方法,包括以下步骤:
14、s1、利用控制计算机预先选定好想要的vr场景;
15、s2、训练人员爬上跳台;
16、s3、训练人员穿戴好背带,使支撑板位于后背,然后在四肢上连接四肢感应组件,最后将vr眼镜佩戴在眼镜上;
17、s4、训练人员从跳台上跳下,此时支撑板在前挂绳与后挂绳的作用下呈水平状,训练人员呈平趴状态模拟高空跳伞的初始状态,当下降到一定高度后,拉动拉绳开关使后挂绳与支撑板分离,模拟开伞,此时训练人员呈竖直状,并通过方向控制绳控制降落方向,模拟开伞,将要落地时,吊板自动下降,使训练人员着陆,完成整个高空跳伞模拟。
18、本发明的有益效果如下:
19、1、本发明通过支撑板与前挂绳和后挂绳的配合,能对高空跳伞自由坠落阶段进行模拟,然后通过拉动拉绳开关,使后挂绳与支撑板分离,模拟开伞,再通过方向控制绳的设置模拟开伞控制,最后通过吊板带动支撑板下降,模拟跳伞着陆,在有限的空间内实现高空跳伞的全部过程,训练效果好。
20、2、本发明通过四肢感应组件的设置,能检测四肢的弯曲角度,然后模拟自由坠落时的方向控制,同时通过转盘带动支撑板转动,支撑板带动训练人员转动,模拟自由坠落的姿态调整,进而能更加真实的模拟自由坠落控制,训练效果更好。
技术特征:1.一种高空伞兵牵引训练用的模拟装置,包括支架(1),其特征在于,所述支架(1)的内部设置有跳台(2),所述支架(1)的内顶部设置有吊板(5),所述吊板(5)能水平与竖直滑动,所述吊板(5)的顶部安装有旋转电机(51),所述吊板(5)的底部转动安装有转盘(52),所述转盘(52)与旋转电机(51)的输出端相连接,所述转盘(52)的底部固定连接有两组前挂绳(53)与两组后挂绳(54),所述吊板(5)的外侧安装有拉力传感器(55),所述拉力传感器(55)的测量端栓接方向控制绳(56);
2.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述四肢感应组件(7)包括固定连接在支撑板(6)顶部的安装板(71),所述安装板(71)的外侧转动安装有卷轮(72),所述安装板(71)远离卷轮(72)的一侧固定安装有测量传感器(73),所述测量传感器(73)与卷轮(72)组成轮式测量仪,所述卷轮(72)的内部设置有扭簧(74),所述卷轮(72)的外侧卷绕有连接绳(75),所述支撑板(6)的内部开设有绳孔,所述连接绳(75)贯穿绳孔,所述连接绳(75)的底部设置有肢体连接环(76)。
3.根据权利要求2所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述肢体连接环(76)采用环形绑带,且环形绑带的开口处设置有魔术贴。
4.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述前挂绳(53)的底部设置有挂环(531),所述支撑板(6)的两侧均设置有连接环(63),所述挂环(531)穿挂在连接环(63)上。
5.根据权利要求4所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述支撑板(6)的两侧均设置有连接筒(64),所述后挂绳(54)的底部设置有连接头(541),所述连接头(541)能插接在连接筒(64)中,所述连接头(541)与连接筒(64)的内部均开设有插孔,所述支撑板(6)的两侧均设置有锁定套(65),所述锁定套(65)的内部滑动连接有插杆(66),所述插杆(66)能插接在插孔中,所述锁定套(65)的内部安装有电磁铁(67),所述拉绳开关(69)能控制电磁铁(67)通断电,所述插杆(66)与电磁铁(67)之间设置有顶簧(68)。
6.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述支架(1)内壁的两侧均安装有横向滑轨(13),所述横向滑轨(13)的外侧滑动连接有横向滑块(14),所述横向滑块(14)的外侧安装有纵向滑轨(15),所述纵向滑轨(15)的外侧滑动连接有纵向滑块(16),两组所述纵向滑块(16)之间固定安装有横撑(4),所述吊板(5)安装在横撑(4)的底部。
7.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述支架(1)的外侧安装有显示器(12)。
8.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述跳台(2)的外侧设置有爬梯(3)。
9.根据权利要求1所述的一种高空伞兵牵引训练用的模拟装置,其特征在于,所述方向控制绳(56)的底部设置有拉环。
10.一种高空伞兵牵引训练用的模拟装置使用方法,应用于如权利要求1-9任一项所述的高空伞兵牵引训练用的模拟装置,其特征在于,包括以下步骤:
技术总结本发明公开了一种高空伞兵牵引训练用的模拟装置及其使用方法,涉及跳伞模拟训练技术领域。本发明包括支架,所述支架的内部设置有跳台,所述支架的内顶部设置有吊板,所述转盘的底部固定连接有两组前挂绳与两组后挂绳,两组前挂绳与两组后挂绳的底部同时挂接有支撑板,所述支撑板的底部设置有背带与VR眼镜,所述支撑板的顶部设置有四组四肢感应组件。本发明通过支撑板与前挂绳和后挂绳的配合,能对高空跳伞自由坠落阶段进行模拟,然后通过拉动拉绳开关,使后挂绳与支撑板分离,模拟开伞,再通过方向控制绳的设置模拟开伞控制,最后通过吊板带动支撑板下降,模拟跳伞着陆,在有限的空间内实现高空跳伞的全部过程,训练效果好。技术研发人员:曹海霞,张涛,曹艳霞受保护的技术使用者:广州森海电子信息科技有限公司技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240618/33649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表