一种工业机器人操作与运维实训设备的制作方法
- 国知局
- 2024-06-21 13:45:43
本技术涉及教学设备,具体涉及一种工业机器人操作与运维实训设备。
背景技术:
1、在智能制造及装备行业的设计制造、装配调试及运行维护、技术支持岗位人才需求量大,每年均新增大量就业岗位,从业人员多,从业人员的技能提升和培训需求旺盛,机器人产业的高速发展,仅学会现有的工业机器人基本操作等技能还不能满足学生毕业后中长期的职业发展需求,因此如何创新地提出一种工业机器人实训设备为操作者提供技能培训实训,就显得十分有必要了。
技术实现思路
1、针对现有如何创新地提出一种工业机器人实训设备为操作者提供技能培训实训的技术问题,本实用新型提供一种工业机器人操作与运维实训设备。
2、为了解决上述技术问题,本实用新型采用了如下的技术方案:
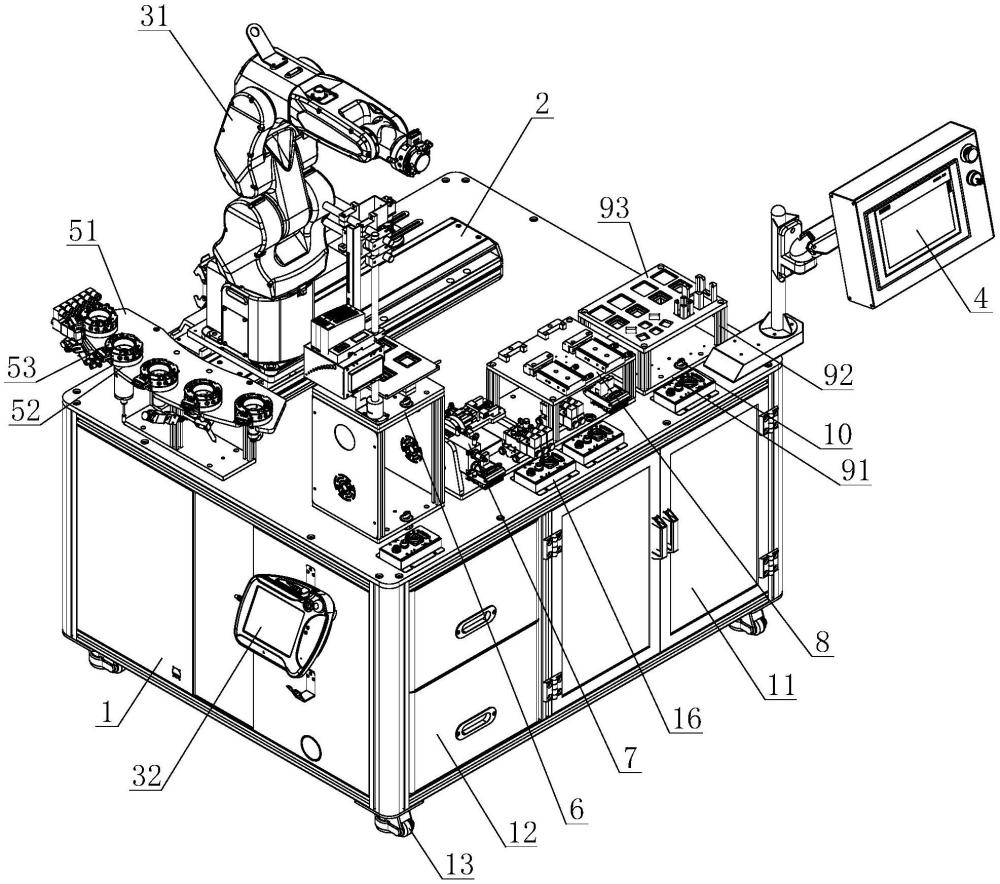
3、一种工业机器人操作与运维实训设备,包括实训台、工业机器人第七轴、工业机器人及控制系统、plc控制模块、hmi模块及实训模块;其中,
4、所述实训台的台面下方配置有柜体,所述实训台前侧、右侧和后侧的柜体均配置有柜门,所述实训台前侧的左部配置有两个抽屉,所述实训台的底部固定连接有福马轮,所述实训台的右侧壁上设置有控制设备运行电源的电源启动按钮、停止按钮和急停按钮,所述实训台的台面上配置有多个电气公共接口,所述电气公共接口包括一路气路输出接口、一路24v电源接口、一路网络rj45接口以及一路sub总线接口,所述实训台的后侧设有气源接口,所述气源接口的气路出口与电气公共接口的气路输入接口连接;
5、所述工业机器人第七轴安装在实训台的台面上,所述工业机器人第七轴由支持profinet总线通信的伺服驱动器驱动伺服电机,所述伺服电机带动丝杆模组,所述丝杆模组具有左右限位传感器和零点传感器,所述伺服驱动器安装在实训台台面下方的柜体内部并与plc控制模块通信连接;
6、所述工业机器人及控制系统包括工业机器人本体、控制柜和示教器,所述工业机器人本体安装在工业机器人第七轴上,所述控制柜设置在工业机器人本体下方的实训台柜体内部,所述示教器设置在实训台左侧的挂钩上,所述示教器、控制柜和工业机器人本体依次电连接;
7、所述plc控制模块设置在实训台前侧柜体内部,所述plc控制模块配置有电源开关以及多路总线电气接口,设置有急停按钮、运行按钮、停止按钮、运行指示灯、停止指示灯以及蜂鸣器;
8、所述hmi模块通过可旋转支架设置在实训台的右前侧,所述hmi模块配置有hmi电源开关和急停按钮;
9、所述实训模块包括夹具快换模块、检测与称重装调模块、零部件翻转模块、装配台装调模块和码垛模块,所述夹具快换模块通过螺栓固定设置在实训台的台面上,所述检测与称重装调模块、零部件翻转模块、装配台装调模块和码垛模块上均配置有快速锁紧装置,所述快速锁紧装置与实训台台面上对应设置的凸轮套互锁,所述检测与称重装调模块、零部件翻转模块和装配台装调模块还分别与实训台台面上配置的多个电气公共接口一一对应电气连接。
10、进一步,所述实训台采用型材框架搭建,台面采用铝材加工成型且表面喷砂氧化。
11、进一步,所述夹具快换模块设置在实训台的左后侧台面上,所述夹具快换模块包括通过螺栓固定设置在实训台上的支撑平台,所述支撑平台上设置有五个夹具放置位,所述五个夹具放置位对应放置有气动夹爪、吸盘、示教笔、涂胶枪和打磨头夹具,每个夹具上分别安装有快换工具盘,所述快换工具盘可与安装在工业机器人本体第六轴末端前端的快换主盘对接。
12、进一步,所述检测与称重装调模块设有工业视觉检测系统和称重系统,所述称重系统包括称重底座、称重台、控制器和远程io模块,所述称重底座通过快速锁紧装置设置在实训台的左前侧台面上,所述称重底座表面安装有称重传感器和视觉检测支架,所述称重台安装在称重传感器上,所述称重台表面设有四个工位,所述控制器通过固定件安装在视觉检测支架上且可上下调节安装高度,所述远程io模块安装在控制器的顶部,所述称重传感器的输出端与控制器电连接,所述控制器显示当前重量且输出端与远程io模块电连接;所述工业视觉检测系统包括相机、镜头、光源和光源支架,所述相机通过相机支架固定安装在视觉检测支架的顶部,所述镜头安装在相机上,所述光源通过光源支架安装在视觉检测支架上,所述光源与相机镜头在竖直方向上同轴心。
13、进一步,所述零部件翻转模块包括翻转底座、翻转支架、旋转气缸和夹持机构,所述翻转底座通过快速锁紧装置设置在实训台的台面上,所述翻转支架安装在翻转底座上,所述旋转气缸安装在翻转支架上,所述夹持机构包括平行夹爪和夹持支架,所述平行夹爪的末端安装有夹指,所述平行夹爪安装在能适应两种不同大小规格工件的夹持支架上,所述夹持支架与旋转气缸的旋转部件固定连接。
14、进一步,所述装配台装调模块包括装配底座、装配立柱、装配台、双轴气缸、定位部件和定位挡板,所述装配底座通过快速锁紧装置设置在实训台的台面上,所述装配台通过四根装配立柱固定安装在装配底座上,所述双轴气缸安装在装配台面上,所述定位部件与双轴气缸的活塞杆固定连接,所述定位挡板安装在装配台面上并与定位部件相对配置。
15、进一步,所述码垛模块包括码垛底座、码垛立柱、码垛平台,所述码垛底座通过快速锁紧装置设置在实训台的台面上,所述码垛平台通过四根码垛立柱固定安装在码垛底座上,所述码垛平台表面设有多个原料仓位和成品仓位。
16、与现有技术相比,本实用新型提供的工业机器人操作与运维实训设备使用时,先对设备进行上电初始化,工业机器人第七轴回到零点处,接着工业机器人第七轴运行到左边0cm处,更换夹具为气动夹爪夹具,更换后工业机器人第七轴运行到码垛模块处,机器人使用气动夹爪夹具从码垛模块上将工件a夹取,工业机器人第七轴运行到检测与称重装调模块处,机器人将工件a放到检测与称重装调模块进行检测,检测后根据情况(工件a是否反面)进行是否翻转,如需要翻转需将工件a从检测与称重装调模块处搬运到零部件翻转模块,经翻转后将工件a从零部件翻转模块搬运到装配台装调模块,如果不需要翻转则将工件a从检测与称重装调模块处直接搬运到装配台装调模块;然后工业机器人第七轴又运行到左边0cm处,更换夹具为吸盘夹具,更换后工业机器人第七轴运行到码垛模块处,机器人使用吸盘夹具从码垛模块上将工件b吸取,工业机器人第七轴运行到检测与称重装调模块处,机器人将工件b放到检测与称重装调模块进行检测,检测后根据情况进行是否翻转,如需要翻转需将工件b从检测与称重装调模块搬运到零部件翻转模块,翻转后将工件b从零部件翻转模块搬运到装配台装调模块,如不翻转则将工件b从检测与称重装调模块直接搬运到装配台装调模块放入工件a中完成装配;之后工业机器人第七轴再运行到左边0cm处,更换夹具为气动夹爪夹具,更换后工业机器人第七轴运行到装配台装调模块处,机器人从装配台装调模块将工件ab夹取,搬运到检测与称重装调模块放下,经检测与称重装调模块检测后,将工件ab从检测与称重装调模块夹取,工业机器人第七轴运行到码垛模块处,将成品工件放入码垛模块的成品仓位处。本实训设备是一种模拟真实机器人工业环境的装调和维修现场的设备,实训对象齐全,功能全面,能够完成机器人的装配、调试与校准等工作,能提高学员的工作技能,并可以模拟各种机器人应用场景,使学员能够在实验室环境下接触到真实的机器人系统,因而可广泛应用于工业机器人培训学校、企业内部培训等领域。
本文地址:https://www.jishuxx.com/zhuanli/20240618/34453.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种LED灯板的制作方法
下一篇
返回列表