一种基于差值五段归零法的飞行模拟器操纵负荷模式切换淡化器的制作方法
- 国知局
- 2024-06-21 13:59:05
本发明属于飞行模拟器人感仿真领域中的操纵负荷模拟技术,用于提供一种在操纵负荷进行人感模拟的不同模式间切换时的淡入淡出方法,以避免在模式切换时的力模拟和杆位置出现突变,提高操纵负荷模式切换的顺滑度。
背景技术:
1、飞行模拟机是一种用于在地面进行训练和培养飞行员飞行驾驶技术的复杂设备,采用先进的模拟仿真技术,使得飞行员能在接近真实飞行环境的模拟座舱内完成全部的飞行课目学习。随着计算机仿真技术的发展,飞行模拟机已成为飞行员训练的必备设施,具有提高培训效率、降低培训成本、节约培训时间等诸多优势,并能帮助飞行员完成复杂和高风险的训练课程,使其能在确保安全的情况下,积累丰富的飞行经验。
2、操纵负荷系统作为飞行模拟机的重要组成部分,能够模拟飞机在正常、非正常条件下的可逆/不可逆飞行操纵系统力感,以及抖杆、杆力释放、自动驾驶等操纵特效,为飞行学员提供逼近真实飞机的操纵感觉。作为一个人在环的机电系统,其安全性、可靠性及易用性成为评价操纵负荷系统的重要指标。在模拟飞机操纵系统的过程中,需要根据飞行阶段对操纵模式进行频繁的切换,在模式切换时,操纵负荷模拟的力(模型力)以及驱动的操纵杆位置(执行机构位置)会产生突变,造成感觉模拟的不适,严重时甚至会危及学员安全,因此需要对模式切换的过程进行淡化处理,以提高系统的安全性和可靠性,并提供更为顺滑的操纵模拟体验。
技术实现思路
1、为解决飞行模拟机操纵负荷系统在模式切换时产生的模型力和执行机构位置突变的问题,设计一种模式切换淡化器,能够让操纵模式切换过程从阶跃突变改变为连续过渡。由于在模式切换后,操纵负荷模拟的模型力和驱动的执行机构位置并非固定,淡化过程需要跟踪切换后处于实施变化目标模型力及目标执行机构位置。
2、本发明的发明目的通过以下技术方案实现。
3、一种基于差值五段归零法的飞行模拟机操纵负荷模式切换淡化器,包括如下步骤:
4、步骤一、标定操纵负荷运行模式切换并进入淡化过程时刻的当前模型力fpre、目标模型力fcur、当前执行机构位置ppre、目标执行机构位置pcur,确定当前模型力和目标模型力的差值δf0,当前执行机构位置和目标执行机构位置的差值δp0;
5、步骤二、将淡化过程分成加加速阶段、减加速阶段、匀速阶段、加减速阶段、减减速阶段五个阶段;
6、步骤三、分析淡化过程的时间需求tout,确定加加速阶段的时间t1,减加速阶段的时间t2,匀速阶段的时间t3,加减速阶段的时间t4以及减减速阶段的时间t5;
7、步骤四、根据淡化过程的差值δf0、δp0以及每个淡化阶段的时间,推导出能通过五个阶段将步骤一所述的两个差值δf0和δp0逐渐变化为0的加减速特性参数,加减速特性参数包含各个阶段与时间呈函数关系的加加速度j(t),加速度a(t),速度v(t);
8、步骤五、根据步骤三所述各阶段时间和步骤四所述的加减速特性,计算在整个淡化阶段每个时间采样点的差值淡化量δf(t)及δp(t);
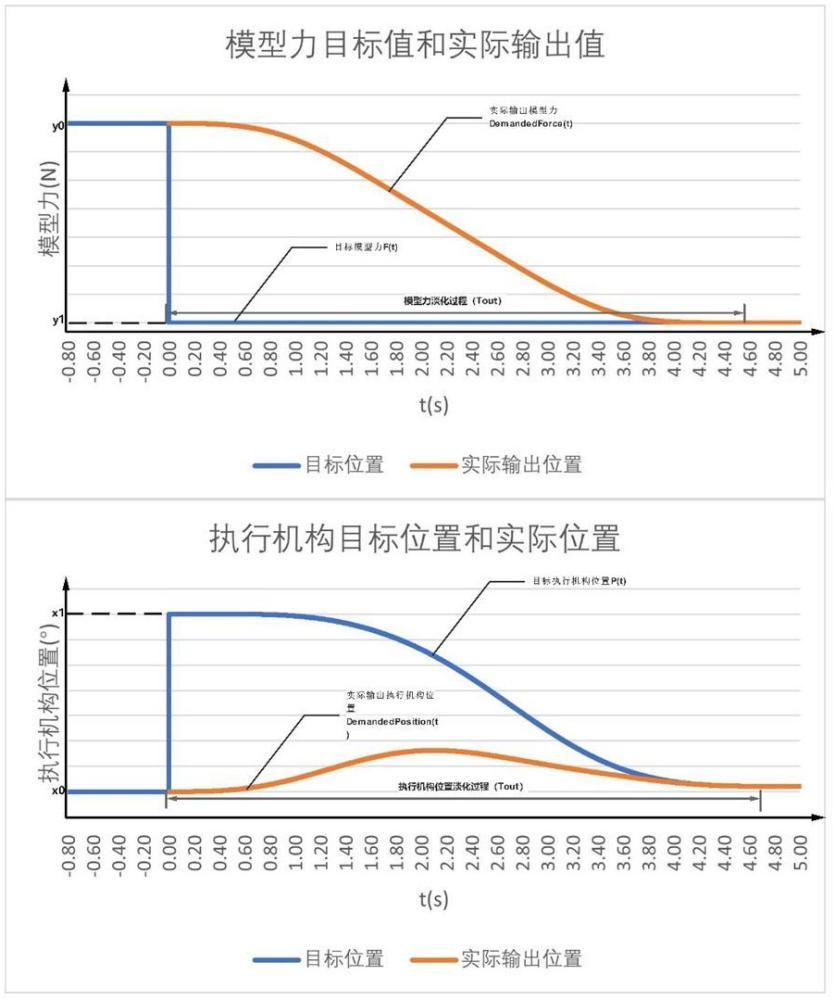
9、步骤六、根据实时变化的目标模型力f(t)和差值淡化量δf(t),实时计算在整个淡入阶段每个时间采样点的实际模型力demandedforce(t);
10、步骤七、根据实时变化的目标执行机构位置p(t)和差值淡化量δp(t),实时计算在整个淡入阶段每个时间采样点的实际执行机构位置demandedposition(t);
11、步骤八、将步骤六和步骤七计算得到实际模型力和实际执行机构位置实时的输出到操纵负荷执行机构执行,完成模式切换淡化。
12、较佳的,步骤一中,当前模型力fpre、当前执行机构位置ppre是指退出前一模式瞬间的模型力和执行机构位置;目标模型力fcur、目标执行机构位置pcur是指进入新的模式瞬间的模型力和执行机构位置。
13、较佳的,步骤二中,加加速阶段的加加速度和减加速阶段的减加速度为恒定值,且绝对值相同、符号相反。
14、较佳的,步骤二中,加减速阶段的加减速度和减减速阶段的减减速度为恒定值,且绝对值相同、符号相反。
15、较佳的,步骤三中,设定(秒),其中maxforce为操纵负荷最大模型力,maxposition为操纵负荷执行机构最大行程。
16、较佳的,步骤三中,淡化的五个阶段的时间满足约束条件tout= t1+t2+t3+t4+t5。
17、较佳的,步骤三中,加加速阶段和减加速阶段的持续时间相等,即t1=t2。
18、较佳的,步骤三中,加减速阶段和减减速阶段的持续时间相等,即t4=t5。
19、较佳的,步骤四中,加加速阶段,加速度a(t)以恒定加加速度j1从0逐渐增大到;减加速阶段,加速度a(t)以减加速度-j1从逐渐减小到0。
20、较佳的,步骤四中,加减速阶段,加速度a(t)以恒定加减速度-j2从0逐渐减小到;在减减速阶段,加速度a(t)以恒定减减速度j2从逐渐增大到0。
21、较佳的,步骤六中,淡入阶段每个时间采样点的实际模型力。
22、较佳的,步骤七中,淡入阶段每个时间采样点的实际执行机构位置。
技术特征:1.一种基于差值五段归零法的飞行模拟机操纵负荷模式切换淡化器,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤一中,当前模型力fpre、当前执行机构位置ppre是指退出前一模式瞬间的模型力和执行机构位置;目标模型力fcur、目标执行机构位置pcur是指进入新的模式瞬间的模型力和执行机构位置。
3.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤二中,加加速阶段的加加速度和减加速阶段的减加速度为恒定值,且绝对值相同、符号相反。
4.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤二中,加减速阶段的加减速度和减减速阶段的减减速度为恒定值,且绝对值相同、符号相反。
5.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤三中,设定(秒),其中maxforce为操纵负荷最大模型力,maxposition为操纵负荷执行机构最大行程。
6.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤三中,淡化的五个阶段的时间满足约束条件tout= t1+t2+t3+t4+t5。
7.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤三中,加加速阶段和减加速阶段的持续时间相等,即t1=t2。
8.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤三中,加减速阶段和减减速阶段的持续时间相等,即t4=t5。
9.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤四中,加加速阶段,加速度a(t)以恒定加加速度j1从0逐渐增大到;减加速阶段,加速度a(t)以减加速度-j1从逐渐减小到0。
10.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤四中,加减速阶段,加速度a(t)以恒定加减速度-j2从0逐渐减小到;在减减速阶段,加速度a(t)以恒定减减速度j2从逐渐增大到0。
11.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤六中,淡入阶段每个时间采样点的实际模型力。
12.根据权利要求1所述的一种基于差值五段归零方法的飞行模拟机操纵负荷模式切换淡化器,其特征在于步骤七中,淡入阶段每个时间采样点的实际执行机构位置。
技术总结本发明公开了一种基于差值五段归零法的飞行模拟机操纵负荷模式切换淡化器,通过标定模式切换时的模型力和执行机构位置变化差值;基于五段法,计算差值变化加减速特性,得到差值归零函数,使得在淡化过程内差值平缓变化到0;在淡化过程中的每个迭代周期内,根据差值和目标值,实时计算最终输出至操纵负荷系统的模型力和执行机构位置,实现操纵负荷在模式切换时模拟的力和位移的平缓过渡。本发明的计算过程仅采用了四则运算,未使用指数、对数等复杂运算,程序实现方便且能在嵌入式平台上以较快的速度完成淡化器的迭代计算;根据真实数据进行仿真,得到的淡化过程数据效果较优,能够有效的提高操纵负荷系统的易用性。技术研发人员:张强,刘大伟,秦俊杰受保护的技术使用者:中航航空模拟系统有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240618/35336.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表